Wookong wk-m полетный контроллер от DJI

У меня просьба к обладателям сего устройства проделать небольшой тест
Как интересно, В среду потеплеет, попробую. А двигатели запускать я так понял не надо? И еще, на каком напряжении проводился тест?
Двигатели запускать не надо. Напряжение 4S.
Откатился с прошивки 5.16 на 5.12, 5.16 мне не понравилась, коптер был очень не устойчив и были подергивания, так вот сегодня вылетал три акб 4S 8000A до напряжения 13 вольт чтото около 3.3 на банку, коптер вел себя просто великолепно, стабильно без подергиваний, ни каких провалов не было, но я еще отключил контроль за напряжением, но он влияет только на сигнализацию.
Если кому интересно, могу выложить видео, писал с борта и с земли.
Если кому интересно, могу выложить видео, писал с борта и с земли.
Вот с земли интересно. И сколько у вас там на градуснике за окном?
Да, как-то поднимали вопрос про светодиоды, а точнее их замену, как и обещал наглядное пособие.
Делал очень быстро, так что эстетики минимум.
- Срезаете силиконовую линзу.
2 Припаиваем общий к плюсу, красный, зеленый, синий к соответствующим площадкам отмечены на фото как RGB
Вот с земли интересно. И сколько у вас там на градуснике за окном?
Да на улице просто (!)па, -23, летал в спортзале)))
Вот с земли интересно. И сколько у вас там на градуснике за окном?
Вот видео, немного длинноватое получилось)))
Здравствуйте.
Приобрел DJI 30A OPTO. Вопрос как их калибровать?
DJI 30A OPTO. Вопрос как их калибровать?
не требуется
Хочу откатится на 5.08 Ткните носом где взять?
может на 5,8? то dronesvision.com отличный сервис и доставка, все от производителя. тайвань
Хочу откатится на 5.08 Ткните носом где взять?
Я уже ссылку давал 3 страницы назад, но раз не заметили, продублирую:
Спасибо, Сережа за подборку!😃
Хотя краткий облет крайней прошивки ничего, пока, плохого не выявил!
Но на всякий случай!😉
Всех соратников (пользователей Wookong - M)
С НОВЫМ 2013 ГОДОМ!!!
Удачных всем полетов и поменьше неясностей при эксплуатации фишки.
Вопрос по подключению iOSD.
Подключать к CAN-шине можно в любом месте или только в MC?
В инструкции показано только подключение к MC. В моем случае это не очень удобно - особенности рамы.
Всех соратников (пользователей Wookong - M) С НОВЫМ 2013 ГОДОМ!!! Удачных всем полетов и поменьше неясностей при эксплуатации фишки.
Спасибо и взаимно!
Хочу поздравить всех с наступающим, Новым 2013 годом! ![]()
Что бы количество взлетов, соответствовало количеству посадок! ![]()
размер 11 дюймов, проц i5 (рабочая частота 1.6-2.0Ггц в турбобоуст) время работы 4-5часов. Винт 256Гб SSD (ставил сам, так было 128) оперативка третья DDR3 4 Ггб.
И куды ся здесь айфонам??? Пальцами здесь тоже мОНа и нуна давить Вот это связка для нормальной работы с наземкой. Видео тянет в реальном времени с бортовой камеры и пишет его. Обработка - без проблем. Графика по винде 5.4 . . Вот только плат (модулей) внешних захвата видео достойных пока не встречал.
Подскажите что за модель? Кто производитель? Имею желание прикупить себе дня настроек в поле. Пока думаю между нетбуком и планшетом на винде.
Подскажите что за модель? Кто производитель? Имею желание прикупить себе дня настроек в поле. Пока думаю между нетбуком и планшетом на винде.
инфа была market.yandex.ru/model.xml?modelid=7777472&hid=642…
у меня для этих целей - market.yandex.ru/model.xml?modelid=8524249&hid=642…
Подключать к CAN-шине можно в любом месте или только в MC?
Если это действительно шина CAN - то без разницы куда подключаться. Модем работает, в какой бы его разъем не подключил
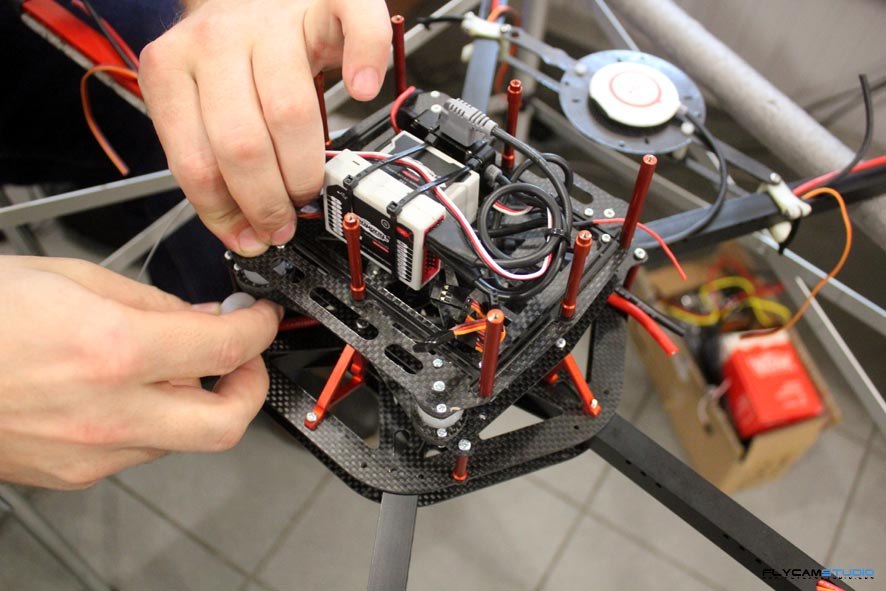
Тоже дошли руки до Вуконга 😎
Краткий отчет:
Сетап коптера:
Полетный контроллер: DJI Wookong-M+GPS
Регуляторы моторов: 60A RAPIDESC (by os-propo)
Безколлекторные двигатели: U28L Pulso 760kv (UAV Series)
Рама: TOP-MK10-6 Carbon (flycamstudio)
Пропеллеры: APC E13X6.5
Аппаратура управления: FUTABA T8FG Super
Разьемы: EC5
Батареи: 2х5800 4S
Подвес простенькая 2х осевая копия ORION H3 местной разработки.
При подключении серв к Вуконгу - они скоропостижно скончались (плохо читал рекомендации)
Оказалось что бек у них в комплекте за 1200$ - говно. Вешать на него нагрузку - не надо.
Что касается последнего пункта в меню настройки Voltage Protection Swich ON
программа выдает кучу ошибок, в том числе с предложением перекалибровать трансмиттер
PMU& Аккумулятор ERROR.
Коллега посоветовал отключить эту функцию, если на “фановом” коптере - ее можно и использовать, то на рабочем аппарате - необоснованный риск. (при некоректной настройке/жесткой просадке аккума, коптер с подвесом и камерой может захотеть сесть на дерево/дом/воду и т.д.)
Следующей проблемой обнаружился чрезмерно высокий уровень газа при старте. Ну очень высокий, хотя програмно он выставлен на минимум. Мыслей кроме как допилить уровень в газа в регуляторе подключив к СС и откалибровать серез ГУИ ОупенПилота не нашлось… В ГУИ к Вуконгу регуль тоже можно настраивать, но в диапазоне 1144-1208 мкс, причем есть только 3 варианта: Low, Recommend и High.
А в прошивке СИМОНКА которую мы используем Min Gas 1060 мкс, поэтому на 4S получается “пистолетный” старт и motor stall.
Мой напарник Сергей с помощью CC передвинул нижнюю границу старта мотора в регулях точно на 1125 мкс, при 1144 мкс вуконговского “Low” моторы плавненько крутятся. Есть куча других способов это сделать, но мы предпочитаем точный и однозначные джидайские методы.
Одним словом, недоработка софта, вернее, его заточенность под “домохозяек” на каждом шагу.

Подведя итоги - потратив неделю (или больше) на сборку этого коптера мы разобрались с вражеской электроникой от ДЖИ, получили практический опыт настройки, это была хорошая возможность провести тесты, сравнив и сопоставив как работает Вуконг на нашей раме в сравнении с другими полетными контроллерами которые мы используем.
Что понравилось:
- Удержание по GPS и высоте - очень четко держит.
- Калибровка компаса - удобно и просто.
Что не понравилось:
- Отдельный бек. Я так понимаю, он большие сервы не тянет, нафиг тогда нужна отдельная коробка?
- Настройки Min Gas. Это китайцы отожгли,
- Стабилизация. Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше, главным образом из-за гибкости контроллера - почти все параметры в Gyro перенастраивались. Здесь по сути только два гейна (Basic и Attitude), их возможностей не хватает. Еще не нравится отработка рудера, в МК мы настроили “вертолетный” руддер с очень четкой отработкой без лишних движений, а здесь сопля в тесте или перекомпенсация .
- Красный глаз. Для настройки он информативный, но просадку напряжения по нему смотреть неприкольно.
помидорка за бек
При подключении серв к Вуконгу - они скоропостижно скончались (плохо читал рекомендации)
Оказалось что бек у них в комплекте за 1200$ - говно. Вешать на него нагрузку - не надо.
писалось и не раз , даже в инструкции написано что не вешать ничего на него кроме допов вуконга !!!
Что касается последнего пункта в меню настройки Voltage Protection Swich ON
программа выдает кучу ошибок, в том числе с предложением перекалибровать трансмиттер
PMU& Аккумулятор ERROR.
- причина в неправильном подключении бека, 2. не вошли в систему под логином ( бывало такое ), 3. выключена аппа
Следующей проблемой обнаружился чрезмерно высокий уровень газа при старте. Ну очень высокий, хотя програмно он выставлен на минимум. Мыслей кроме как допилить уровень в газа в регуляторе подключив к СС и откалибровать серез ГУИ ОупенПилота не нашлось… В ГУИ к Вуконгу регуль тоже можно настраивать, но в диапазоне 1144-1208 мкс, причем есть только 3 варианта: Low, Recommend и High.
А в прошивке СИМОНКА которую мы используем Min Gas 1060 мкс, поэтому на 4S получается “пистолетный” старт и motor stall.
Мой напарник Сергей с помощью CC передвинул нижнюю границу старта мотора в регулях точно на 1125 мкс, при 1144 мкс вуконговского “Low” моторы плавненько крутятся. Есть куча других способов это сделать, но мы предпочитаем точный и однозначные джидайские методы.
не вижу здесь проблемы вуконга , ХЗ что вы зашиваете в реги
Стабилизация. Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше, главным образом из-за гибкости контроллера - почти все параметры в Gyro перенастраивались. Здесь по сути только два гейна (Basic и Attitude), их возможностей не хватает. Еще не нравится отработка рудера, в МК мы настроили “вертолетный” руддер с очень четкой отработкой без лишних движений, а здесь сопля в тесте или перекомпенсация .
вы реально перемудрили со своей рамой , ИМУ должен быть закреплен на раме у него свой просчитанный демпфер , у вас двойное демпфирование - получите сопли со стабилизацией и рудером (+ ко всему недогруженный аппарат (МК с этим хорошо справляется)) Какая чуйка у вас сейчас по питч-ролл , киньте скриншот настроек посмотреть. совет кстати поднять жпс выше линии моторов , а то можно будет удивится.
Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше
я вам немца вы мне вуконг ?? 8)))))
Спасибо Владимир за полезные каменты! Вуконга мы отдали, перекрестились и решили больше не связываться.
Мы специализируемся на МК, как проверенном годами контроллере с “неподмоченной” репутацией - под него и спроектирована рама, однако систему виброразвязки можно зажать в ноль, дело не в ней 100%, мы рассматривали этот вариант. ЖПС и центр масс конечно же в программе выставили при настройке. А с бек как получилось - сам в шоке!
Что касается полетных качеств платформы(без использования рюшечек) - то я еще ни одного тяжелого Вуконга летающего на уровне МК не видел.