CRIUS ALL IN ONE PRO Flight Controller

Для тех, кто боится оторвать разьем от платы, есть красивое и простое решение
Mini USB to Micro USB Adapter

с такой приблудой думаю оторвется еще быстрее, лучше пропаять
дело не в мини/микро
Я вот не думаю, и у меня не отрывается. (Может не надо много думать?)
Там нечего пропаивать. Отрывается с дорожками.
Дело именно в мини. Он вставляется в два раза легче.
Если приклеить термоклеем то не оторвется, и думать не надо.
Самое правильное решение - воткнуть Bluetooth и забыть о USB.
Я вот не думаю, и у меня не отрывается. (Может не надо много думать?)
Там нечего пропаивать. Отрывается с дорожками.
Дело именно в мини. Он вставляется в два раза легче.
у меня в.1 как раз с проблемным разъемом, если аккуратно все делать - не отваливается, а если будет торчать в нем такая приблуда, то ее нечаянно задеть и выломать шансов больше:) или я не понял как ею пользоваться:)
Самое правильное решение - воткнуть Bluetooth и забыть о USB.
А прошиваться как? Если б можно было бы хотя бы по телеметрии скетчи заливать вот это было б здорово.
Граждане, немого отстал от темы, может уже где и обсуждалось. Ситуация такова, есть AIOP и MAVLink-OSD. На AIOP стоит прошивка RC2 от Маховика (СПАСИБО САШЕ ОГРОМНОЕ). Так вот на сколько я понял MAVLink протокол сделан под ArduPilot и с Мультивием не особо общается. Может кто-то как-то их уже подружил и получил работоспособный конфиг?
с Мультивием не особо общается
а ну так вы про minimOSD 😃 сейчас уже и под арду и под вий полноценная поддержка есть…
вам сюда:
code.google.com/p/rush-osd-development/…/list
code.google.com/p/…/MinimOSD_Basic_Setup
но работает полноценно вроде как с 2.2 вием…
но работает полноценно вроде как с 2.2 вием…
Саша, спасибо огромное за наводку. Попробую на RC2 твоей запустить её.
Можно ли с помощью этой платы каким-то образом задавать движение квадрокоптера не имея GPS? т.е нужно попасть из одной точки в другую. Я так понимаю, что этой можно сделать, ориентируясь на время.
Мне еще тут утверждают, что это можно реализовать использую встроенный HMC5883L 3-осевой цифровой магнитометр, ориентируясь только по магнитному полю…Возможно?
Попробую на RC2 твоей запустить её.
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
скоро думаю update на 2.2_RC3 будет 😉 как обычно почти все готово, кроме описания… аксель+гпс с большего дописал тоже, но пока не получается хорошо настроить да и погоды толком небыло… потому если релиз и будет скоро, то аксель+гпс фишка скорее всего как экспериментальная выйдет, т.е. на попробовать…
Можно ли с помощью этой платы каким-то образом задавать движение квадрокоптера не имея GPS? т.е нужно попасть из одной точки в другую. Я так понимаю, что этой можно сделать, ориентируясь на время. Мне еще тут утверждают, что это можно реализовать использую встроенный HMC5883L 3-осевой цифровой магнитометр, ориентируясь только по магнитному полю…Возможно?
оффтоп… почитайте про принципы инерциальных систем навигации… если коротко, то на мемс сенсорах без корректора аля гпс это невозможно…
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
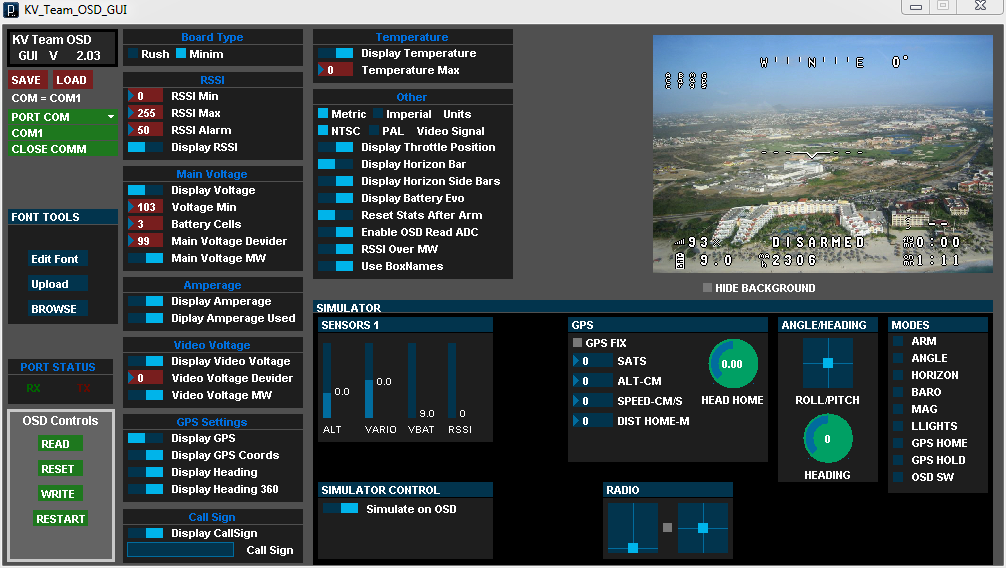
Результат таков. Видно, что данные идут, но во первых какая-то дикая проблема с выводом(кодировкой), во вторых не все данные отображаются. В общем картина вот такая.
во первых какая-то дикая проблема с выводом(кодировкой)
шрифт залейте! там в гуи кнопка есть… 😉
слевa Font Tools -> Upload
оффтоп… почитайте про принципы инерциальных систем навигации… если коротко, то на мемс сенсорах без корректора аля гпс это невозможно…
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
В идеальных условиях да.
Но вот вы не учли вибрацию, наводки на компас, ветер. Для корректировки этих ошибок и нужен GPS
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
на столе в тетрадке в формулах будет работать… у акселя есть нелинейность шкал, шум, вибрации и т.д… один интеграл не удержать без корректора (баро/гпс), а про 2 даже говорить не о чем… я дин. коэф. в компл. фильтр вводил для удержания 2-го интеграла в расчете высоты…
В идеальных условиях да.
Но вот вы не учли вибрацию, наводки на компас, ветер. Для корректировки этих ошибок и нужен GPS
Можно в реальных, но точность будет низкая поскольку ошибка накапливается. Год тому с акселерометром возились много при попытке сделать нормальное удержание по высоте на BMP 085. Реальная точность по компасу 5 град легко, а если повозится то и лучше будет.
Можно в реальных, но точность будет низкая поскольку ошибка накапливается.
если и можно, то только на секунды, а то и доли секунд…
по сути потому и называют сейчас prediction/предсказание по акселю, т.к. акслель дает быструю сост-ю практически без задержки фазы, НО на те сотни миллисекунд, которые так необходимы конечным пид регуляторам для устойчивой работы…
мой опыт такой: просто по акселю в перспективе от нескольких секунд и выше такая каша выходит, что данными это уже не назвать… вердикт- нельзя!
Результат таков. Видно, что данные идут, но во первых какая-то дикая проблема с выводом(кодировкой), во вторых не все данные отображаются.
Во-первых, спасибо Александру Маховику за помощь - все заработало. После перепрошивки MavLink-OSD/minim OSD начал корректно выдавать данные, полученные от AIOP. Во-вторых, если вдруг у кого-то возникнет такая же проблема, то сначала качаем здесь KV_Team_OSD_dev_r345.zip, потом по инструкции перепрошиваем свой MavLink-OSD/minim OSD. После в KV Team OSD GUI делаем upload шрифтов и настраиваем всё под себя. Далее необходимо подсоединить плату OSD к Serial 0 (TX->RX и RX->TX). После этого по-идее должно всё заработать.
все заработало
так а данные все идут с 2.1 прошивкой? переключение всех режимов отображается?
После в GUI делаем upload шрифтов.
может пропустили… я сверху писал об этом…
upd: аа понял, это вы подытожили… 😃