Activity
Не думал, что буду писать тут про такие вещи, но, пожалуй надо - недавно остановилось сердце моего коллеги по хобби, моделиста с большим стажем, доктора химических наук, отца четырёх детей, Фёдора Дульцева.
images.vfl.ru/ii/…/27514871.jpg (3.1 MB)
Фёдор этой зимой с самодельным “Фантиком”.
Родился в 1959 г. в нашей Нской волости; всё детство его прошло в с. Староалейское, на юге Степного Алтая, где он и пристрастился к нашему хобби - запускал планеры и первые самолётики.
Затем - учёба на ФЕН НГУ и работа у нас в Академгородке, в Институте физики полупроводников. Всё это время он также не забывал про хобби, несмотря на четверо собственных детей плюс один племянник, которого воспитывал как сына, и которого тоже вовлекал в наши полётные дела. Относительно незадолго до нашего знакомства лазил на ЛЭП, снимать свой очередной самолётик - тут у нас не Алтай, летать особо негде.
Познакомились в 2015-м году, в теме про Walkera 350 pro; совместно учили эти аппараты летать, вполне успешно; затем ушли в самоделки, которых Фёдор понаделал весьма немало - от 250-х “гонщиков” до 700-мм монстра, который так и не довели до ума, увы.
Планов было громадьё, но вот как-то так на ровном месте просто сердце остановилось - дома, за компьютером, и скорая не смогла откачать. Теперь даже не знаю, что с наследием Фёдора делать; он большинство своих творений допиливал до ума сам. Ну, поди, разберёмся.
images.vfl.ru/ii/…/27514870.jpg (4.1 MB)
Полёты за Морозово - одно из лучших воспоминаний о Фёдоре и наших совместных делах.
Вот уже три года эксплуатирую дрон французского производства Parrot Bebop2, также известный как “Попугай” (хотя это - название фирмы, а не модели); за прошедшее время он изрядно разболтался и качество видео у него стремительно приближалось к плинтусу; надеюсь, описанные в статье манипуляции позволят продлить его актуальность.
Попугай (он же B2) имеет врождённый недостаток - плохо снимает в минусовую температуру; это, к сожалению, практически не лечится, ибо пластиковая линза на морозе деформируется и досвидули. У кого-то фокус наведён чуть лучше в минусовую зону, а у меня даже после смены объектива (ценой в треть аппарата) ситуация никак не изменилась; более-менее пристойно он снимает лишь при температуре выше +20С, что для наших сибирских краёв резко сужает его область применения. Но это я уже скорее выношу за скобки, это надо понять и простить; в дальнейшем буду говорить за качество съёмки уже с учётом данной фичи.
В ходе эксплуатации дрон несколько раз падал; правда, в основном относительно мягко, и жёстких крашей было всего два - один раз дрон сбило ФСБ; другой раз он навернулся с 80м на берегу Ангары; но почти никак не пострадал. Однако это “почти” всё-таки даёт о себе знать; на видео появилось заметное “желе”, что вкупе с и без того неважнецким качество картинки и стало последней каплей, понудившей меня заморочиться заменой валов на аппарате.
Заказал валы, а также пропчики на Али; удовольствие не из дешёвых, учитывая попугайские размеры.
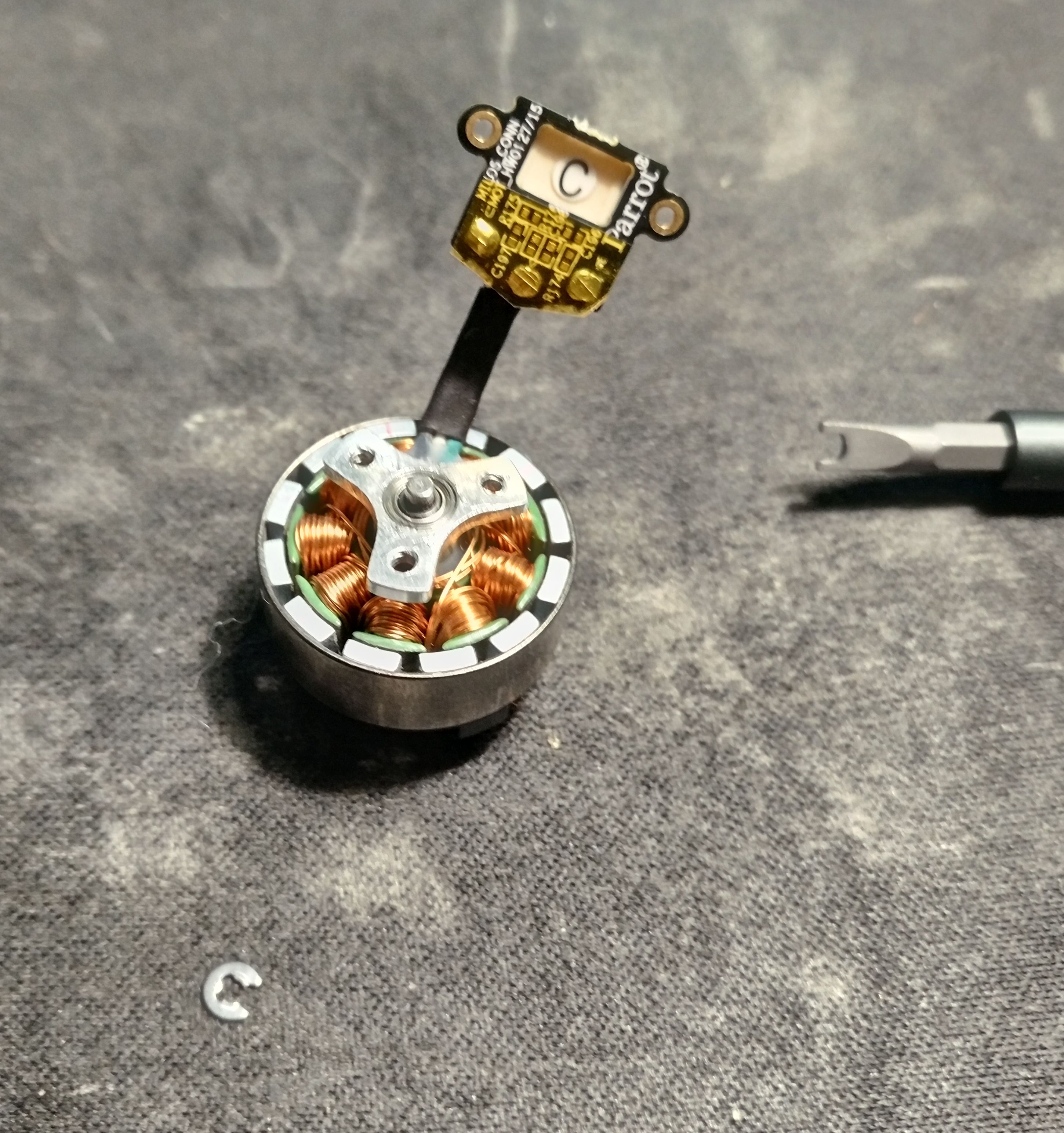
Почти всю зиму не мог приступить к замене валов, ибо не было подходящей отвёртки. Процесс разбора аппарата показан в специальном видео от производителя, там всё тривиально, кроме процесса снятия и обувания фиксирующей шайбы, на которой держится мотор; но с этим тоже как-то можно справиться. В итоге птиц был всё же подкован:
Затестили аппарат после замены валов при сильном ветре (жаль, не на что было снять “колбашение” Попугая, телефон использовался для управления) - на старых пропчиках картинка так себе, на уровне до замены валов, но в условиях штиля; а вот с новыми валами и на новых пропеллерах аппарат выдал на удивление ровную картинку, даже качество улучшилось - что и не удивительно для программной стабилизации видео:
Не обращаем внимание на расфокус - на дворе +3С и аппарат сымает, как умеет. Первая часть видео (до 3:00) снята 26 марта, до замены валов; при тех же +3, но в условиях безветрия; потом - съёмки 6 апреля, +3С и сильный ветер. До 5:00 - старые пропеллеры; последняя часть видео - новые пропы.
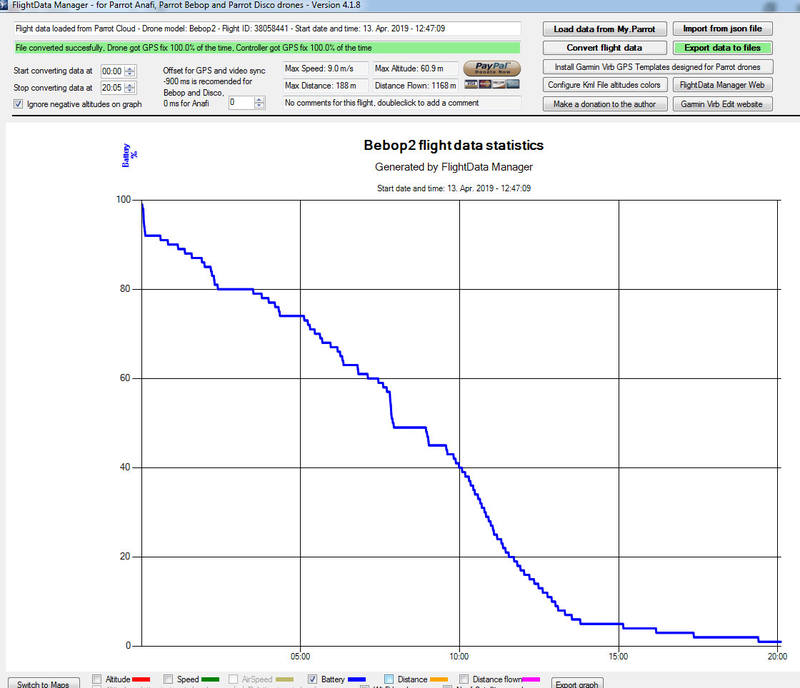
Чтобы два раза не вставать, доложусь также об опыте полёта на литий-ионках; попробовал погонять аппарат на колхозе (так летаем с начала эксплуатации), но уже не на 18650, а на извращённом формате 21700, какой-то китайский Sofirn; как это принято у китайцев, ёмкость соответствует, а вот внутреннее сопротивление и, сталбыть, токоотдача - нет. На батарее весом 220+ гр удалось налетать суммарно всего 14 минут, до 5%:

Строчка ниже - также тест на литий-ионках 18650 Самсунг-30Q; получилось даже бодрее. Правда, для 21700 это - первый цикл заряда; может, ещё “раскачается”; пока что показывает сопротивление порядка 20мОм на банку.

Сборка из 21700 на Попугае; сзади - сборка из 18650.
Для “коробочных” аппаратов литий-ион имеет весьма ограниченное применение - одна из его фишек, просаживаемость ниже “липошных” 3.5В, тут не работает, нижнюю отсечку не перенастроить. Надо сказать, что для Самсуня “липошная” отсечка примерно соответствует - специально высадили батарею буквально в ноль по Попугайской мерке, и на последних процентах аппарат ощутимо болтало даже в штиль - видно, уже не хватало токоотдачи. А вот Софирны явно можно просаживать и дальше - но увы. Ещё одно важное замечание - банки садятся очень ровненько, не в пример дешёвым липошкам; для Самсунга разница H-L после посадки составила 0.01В.
В общем, если подытожить - замена валов и пропеллеров очень даже имеет смысл, если ваш аппарат уже изрядно побит жизнью. Китайские аналоги дают ощутимое желе, и ухудшают общее качество картинки. Пересаживание Попугая на литий-ион не даст вам мощного прироста в длительности полёта; разве что удешевит стоимость батарей.
Апдейт: попробовал высадить 21700 в ноль и постигло удивление - ниже 10% батарейка садится сильно медленнее, чем до. Второй вылет с высадкой батареи до 3.55В на банку (без нагрузки, H-L 0.03В), т.е. в 0% по-попугайски - 20 минут, из которых треть - на последних 10%:
В начале провал, потому что это был уже второй вылет, первый был буквально 10 секунд.
Долгожданное (неизвестно кем) продолжение сериала про борьбу с вибрацией на долголёте; предыдущая часть тут, там их накопилось уже немало.
Дабы не томить, сразу расскажу главные выводы мартовских тестов с разными пропами, подвесами и даже рамами в целом - проблема вибраций, как верно подсказывали в каментах, в низкооборотистых моторах, которые и вызывают заметную по видео дрожь картинки. Это не значит, что всё пропало, уже работаем над решением проблемы, но пока что результаты не ахти; результат - в конце статьи.
2 марта установили на аппарат виброразвязку и 14" пропы; это уменьшило тряску, но ненамного:

Виброразвязка и 14" на раме долголёта
Немного помогло, на скорости до 20 км/ч вибрации почти не заметны; но при разгоне и вертикальных манёврах - по-прежнему туши свет.
3-го числа включил на камере (FireFly 8s, 90-градусная версия) гироскоп, для чего пришлось понижать разрешение с 2.5К до FullHD; сразу поплыло качество, но вибраций стало ещё меньше:
На это временно решили от старой рамы отойти и попробовать потестить поведение низкооборотных моторок на других, более стандартных рамах; первой под нож пошла Тарот-650, которую коллега Фёдор купил по дешёвке в колбасном отделе. На неё установили какие-то 380KV-оборотистые моторки (не понял модели), и попробовали погонять с разными подвесами:
До 4:25 - самодельный подвес + Xiaomi YI, потом - Tarot t4 + FF8s (гироскоп включён).
Забыл отключить гироскоп для более адекватного сравнения подвесов; но в любом случае тест бы получился некорректным, ибо почему-то уже на месте оказалось, что t4 попросту… не влазит на направляющие рамы, не хватает длины рельсы. Пришлось колхозить вместо рельс… кисточки, завалявшиеся в сумке Фёдора:

Рельсы, карбон… кисточки - наше всё!
Судя по результату, вибрации на этой раме есть, и практически повторяют предыдущие наши проблемы; правда, с помощью стабилизатора вибрация уже практически съедается (за вычетом вертикальных манёвров, но там ещё PID не настроены); но это же читерство, будем копать дальше.
ЗЫ: почему т4 принялся валить горизонт, ума не приложу; но мы пока об это не думаем. На крайний случай, есть Tarot 3D с позапрошлогодней гексы.
На предыдущих выходных осуществил мечту своего знакомого - с коллегой Фёдором немного поснимали зимний футбол с дрона. Жывотные не пострадали; однако снимать пришлось с аппаратов, не очень приспособленных для подобных съёмок; полётное время в трёх вылетах составило 5,6 и 10 минут, что для футбольного репортажа не ахти.
Второй сезон воюем с долголётом; пока никак не побеждаются вибрации на нём; так что пришлось выгонять позапрошлогоднюю гексу и снимать с неё:
Видео стабилизировано программой ProDad.
Что-то странное случилось с основными батарейками для гексы, слишком малое полётное время получилось; так что в основном в ход пошли съёмки с самодельного Фантома-2 производства Фёдора; аналоги комплектухи Ф2, собранные в корпус Ф2 + самодельный подвес с SJCam4000:
Со скринов потом ещё анализ ситуаций делали:
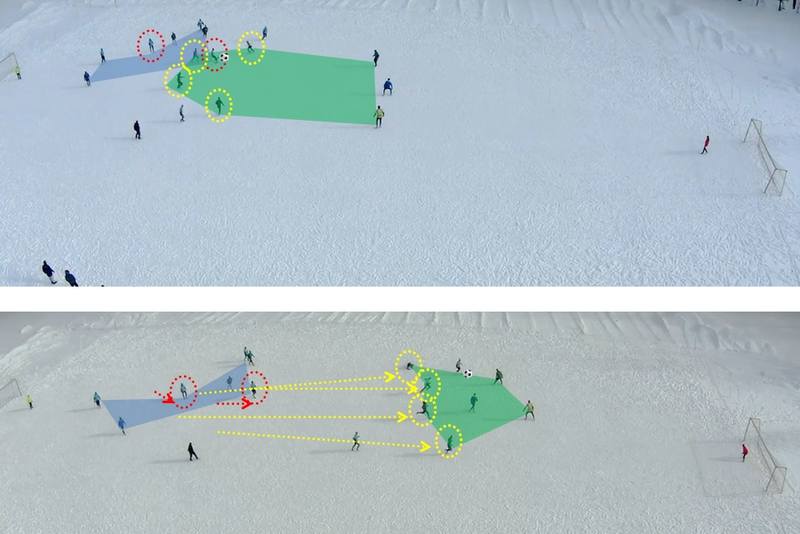
Со съёмками проблем никаких не было, над людьми не летали; максимум можно было впилиться в дерево задним ходом, но дураков нема.
К сожалению, с долголётом продолжается всё та же фигня; тряска в полёте прямо-таки напрягает, хотя визуально аппарат висит как прибитый, к нему можно спокойно подходить и хватать за всякое.
images.vfl.ru/ii/…/25535431.jpg (3.8 MB)
Полная версия фото
Пока что ограничились заменой пластиковой версии пропов на карбоновую, с допиливанием и балансировкой - воз и ныне там. Глобальные изменения рамы пока планируются, все силы Фёдор кинул на тесты новой рамы из… лыжных палок:
images.vfl.ru/ii/…/25535452.jpg (4.1 MB)
Полное фото
Аппарат получается значительно легче, и вибраций на нём почти нет; правда, это на самокрутных моторках о 500KV, зато с самопальным 2D-подвесом. Может, из этого что-то получится.
Продолжается бразильский сериал на тему горизонтальной вибрации на самодельном долголёте; предыдущая часть тут.
После опробования различных вариантов решения проблемы вибраций решили поменять моторы - предыдущие 5010 в ходе предыдущей борьбы были биты-перебиты, и мы грешили на их проблемы с валами; так что проблему решили кардинально, заказом куда более дорогих Таротовских моторок 4008, причём не дешёвой, а дорогой версии, т.н. Тарот Мартин, о 330KV:

Заказывал на али, и до последнего переживал, что пришлют фуфло, но вроде ничего, даже упаковка оригнальная; причём долетели они всего за 3 недели. И, как назло, морозяка под -40, так что облетать новинку удалось только на этих выходных, когда потеплело до -15С:
images.vfl.ru/ii/…/25329970.jpg (1.1 MB)
Оригинал фото
К сожалению, воз остался там же:
Как видно на фоточке, попробовали поменять пропы; хотя я настаивал на продолжении тестов на “треугольных” пропах, что-то там не ладно с их креплением, так что отлетали на складных пропчиках от Тарот; причём моторки позволяют юзать эти пропы без центральной железяки. Пробовали на пластиковой версии; есть и карбоновые лопасти, потом потестим и их тоже.
В общем, как давно уже подсказывают, скорее всего проблема в конструкции рамы и квадратном сечении лучей. Что несколько странно, с учётом того, что позапрошлогодняя гекса замечательно летает и не трясётся при тех же “квадратных” лучах; правда, там моторки 2112 и пропчики 10", да и лучи куда более жёстко фиксированы в горизонтальной плоскости; вот, кстати, и она на наших полетушках:
images.vfl.ru/ii/…/25329971.jpg (4.1 MB)
Оригинал фото
В планах - очередная смена рамы; возможно, всё-таки вибрации удастся превозмочь. Но про это - в следующих сериях.
Кроме борьбы с долголётом, выгуляли ещё три аппарата; вышеупомянутую гексу проверили после полугодовалого прозябания; надёжна, как всегда, тут никаких сюрпризов и не предвиделось.
В очередной раз попробовали пересадить француза Bebop2 на литий-ионки; так себе попытка вышла - хотя, скорее всего, виноват мороз; в отличие от прошлого опыта на китайской литокале (на которой долголёт до сих пор летает и почти не жужжит), в этот раз Попугай не принялся валяться в снегу, а полетал минутку, неплохо при этом управляясь:

В общем, есть мнение, что Samsung INR 30Q или не оригинал, или не очень подходит. Хотя на B2 в любом случае теряется одно из главных преимуществ литий-иона - возможность просаживать банки ниже 3.5В; не влезть в прошивку.
Под конец Фёдор запустил свой первый опыт на иНаве - правда, это пока предварительная версия, основной контроллер летит с БГ уже второй месяц:
images.vfl.ru/ii/…/25329972.jpg (3.5 MB)
Это не гонщик, а мини-долголёт
В общем, постараемся навёрстывать зимнюю спячку. На летний сезон, как обычно, планов громадьё.
Продолжаем доводить до ума самодельный складной долголёт; пока что пришли к выводу, что надо менять двигатели.
Как писал в вышеуказанной статье, как-то этот проект у нас не идёт, как-то даже удивительно. Позапрошлогодняя гекса после решения дедской проблемы с регуляторами полетела и до сих пор с ней не бывало проблем; если бы не малое полётное время и вес, был бы аппарат мечты. Данный же аппарат никак не доведём до ума, хотя как раз полетел он сразу, но с кучей второстепенных головняков.
Первой проблемой аппарата было косячное управление от китайской версии OpenLRS; достигали на ней дальности 3.5км (с направленной антенной моксон), но настолько всё с ней ненадёжно, что несколько раз едва не потерял аппарат и решил перейти на R9, о чём не пожалел; даже с гибкой “сосиской” на передатчике улетали с ней почти на 4км; и это не на максимуме мощности. Была одна попытка улететь, но там в полёте отвалились провода в GPS-модуле (!); хорошо ещё, что было близко.
Но проблему тряски аппарата так победить не удалось - что бы мы не делали, уже и раму меняли, и регули но-нейм поменяли на LittleBee, аппарат колбасит мелкой дрожью.
С новыми регулями тряски стало вроде бы меньше, однако попытка настроить PIDы привела к неожиданным результатам - аппарат начало качать в сторону одного из моторов, который в ходе разворотов по Яву пару раз просто… выключился в полёте. Хорошо ещё, что тесты проводили в полуметре над субгробчиками 😃 Скорее всего, что-то с моторкой не то, и если старые регули её как-то держали на плаву (возможно, ценой тех самых вибраций), то “пчёлка” просто говорит “какая попсня, вырубите на***”. Жаль, моторки выглядели привлекательно - мощи много, цена небольшая; но, видимо, у всего есть своя цена.
Обидно, что у коллеги Фёдора, который и собирает наши агрегаты, куда более тяжёлый и большой аппарат летает на дешёвых движках без проблем; по полётному времени, конечно, цифры получаются другие, но тоже не 10 минут.
В общем, решил я перейтить на Tarot Martin 4008 330 KV; сперва сам нашёл эти движки в этих ваших интернетах, а потом узнал, что их использовал для своего квадра небезызвестный Юлиан. Посмотрим, что получится на более дорогой комплектухе, чем наше обычное “из дерьма и палок”.

В планах ещё один аппарат, на сей раз на iNav; а то мы что-то подзадержались на Назе-то; это не со зла, а потому, что эти Назы в основном ещё остались с Фантома-1 😃 Но об этом - в следующих сериях.
Очередная серия марлезонского балета по доведению съёмочного долголёта на Назе до приемлемого состояния. В эти полётные выходные тестировали разные пропы, разные подвесы, и в конце концов немного грохнули аппарат, чего давненько уже не было.
Всю прошлую зиму, с момента первых полноценных тестов аппарата, в основном воевали с управлением 433Мгц от WolfBox; описание тут. С переходом на управление R9 от FrSky проблемы с управлением ушли (хотя, подозреваю, есть ещё масса мест для полировки); но осталась проблема, на которую раньше мало обращали внимания - горизонтальные вибрации в полёте. Иногда всё ок, а иногда - прямо настоящее желе лезет. В эти выходные бились с этой проблемой, но пока безрезультатно.
Грешили на подвес Tarot T4; он у нас битый в ходе борьбы с управлением; и, возможно, что-то где-то разболталось. Поставили предыдущий подвес - Feyutech Mini 3D - тот регулярно валит горизонт, но в горизонтальной плоскости куда задумчивей, и надеялись на изменения; бесполезно, всё так же. Также попробовали поставить 14" пропы вместо “штатных” 15"; с ними даже без балансировки аппарат вроде бы висит стабильнее, но на видео по-прежнему та же тряска.
В первый день собирались на маленькой, ближней поляне, там вроде бы аппарат не так сильно трясло, но это потому, что там не разогнать, да и ветра нет. Стоило приехать на большое поле и дать тапку в пол, как на видео стало опять больно смотреть, даже в шлеме. И дело тут не столько в максимальной скорости, сколько вообще в смене скорости движения; пока висим, вроде более-менее ок; стоит начать набирать скорость, как прёт желе. Ветер тоже добавляет спец. эффектов.
Пока что одна из основных версий - прямоугольная конструкция лучей; возможно, из-за особенностей аэродинамики появляются удары в борт лучей и раскачка аппарата. А может, это косяк моторов. Думаем.
Параллельно потестили эффективность 14" пропов; выборка не совсем репрезентативна, вылетали всего одну батарейку, но на второй всё пошло не по плану; единственный зафиксированный результат ~ 30 минут полётного времени на 6s 9А/ч сборке из “VTC6” от Литокалы. На 15" получалось то ли 34, то ли 38"; то есть разница таки есть.
Также в очередной раз потестили дальность управления с штатной “сосиской” на передатчике R9 - уже не впервой выяснили, что она хуже гибкой антенны (177мм по обозначению FrSky); на 100 мВт мощности не смогли улететь дальше, чем на 2050м, хотя намеренно пробивались через кучу файлсейвов; а на 500 мВт достигли дальности 3250м, и тоже сплошные FS; тогда как на гибкой антенне улетали на 2400 и 3800 соответственно. Это, кстати, важно - в дальнем от нас конце поля в кои-то начали убирать пшеницу комбайнами, хотел заснять работу комбайнёров; но из-за проблем с дальностью ничего толком не получилось. Хотя в любом случае съёмки запоролись из-за тряски. А погода была хороша; мог бы получиться клипчик.

Также потестили аппарат Фёдора; на фото выше Турнига на земле - от него. Летает нормально, не трясётся 😉; с управлением и видео нормально, хотя видиопередатчик 600мВт, это, конечно, не 2Вт на основном аппарате - уже в километре картинка не айс; но лететь можно.
Последний вылет закончился мини-крашем. Как раз сгоняли вдаль, посмотрели на комбайны, упёрлись в дальность управления, вернулись; но после 6.5 пройденных километров оставалось ещё 20В на батарейке, надо было “дожечь”, чтобы проверить эффективность пропов. Полетели в поле по соседству; оно небольшое, где-то 1*1 км. В ходе перелёта туда начали валиться файлсейвы; это не совсем нормально, но в общем-то объяснимо - оно за перегибом, а высота совсем небольшая.
Также неожиданно выключилась камера. У нас мощности внешнего питания не хватает для полного питания камеры, и она постепенно садится в полёте; вот и села. В принципе, ничего страшного; даже в случае FS аппарат вернётся безо всякого FPV, поэтому ещё немного полетали, когда она включилась снова.
Но на обратном пути случилось к-к-к-комбо - отказал GPS, и затем снова выключилась камера. Сколько летаем на Назе, на трёх разных аппаратах, отказ GPS случился впервые; точнее, был уже один случай, но тогда провод GPS попал под пропеллер, это не совсем считается. Хорошо ещё, что аппарат уже шёл курсом “домой”, и вернулся почти точно в точку взлёта. Правда, при посадке ему снесло башню (грешу на то, что не переключился режим в ATTI, и в какой-то момент GPS таки принялся “корректировать” движение), и он принялся улетать, практически не управляясь; но удалось сбросить высоту и довольно жёстко посадить его в поле. Но вроде бы ничего не пострадало, только подвес выбило с направляющих.
DVR-видео инцидента с субтитрами.
Последние события, вкупе с ограниченностью Назовской OSD, наталкивают на мысль перейти на iNav; пока что думаем. Тут бы вибрации победить; это сменой контроллера не решить.
Продолжение доработок долголётных конструкций, предыдущая часть тут.
Основная проблема аппарата, которая выносила мозги с зимы, с перехода от китайской версии LRS на управление от R9, ушла окончательно; хотя детали настройки ещё впереди; по-хорошему надо померить КСВ-метром антенны и выставить оптимальные диапазоны, получше расположить антенны, но пока что дальности уже хватает для большинства полётов, причём даже не на максимуме мощности.
Коллега по хобби предложил переставить антенны-дипольки вертикально, а не горизонтально, как они у нас располагались. Мысль сама по себе верная, но крепить их там надо с умом, а мы прилепили, как попало (хотя и вертикально), и в итоге получили дальность, меньшую, чем раньше - 800м, на мощности 10 мВт.
Тесты проводили в этот раз только с гибкой антенной (177 мм, по маркировке FrSky, в отличие от штатной “сосиски”), и почему-то вертикальная ориентация антенн приёмника при вертикальном же расположении антенны передатчика вообще “не зашла”. Возможно, данная антенна не совсем все-направленная, надо будет померить.
К сожалению, RSSI-сигнал так и не вывели, так что мерим дальность по файлсейвам - упёрлись, крутим антенну, сигнал ворочается, летим дальше. С вертикальными антеннами номер вообще не прошёл - на 800 метров пошли обрывы, на 870 связь порвалась окончательно и восстановилась взад только на 500м, как пультом не крути. Возможно, некорректно закрепили на стойках, изначально заточенных под горизонтальное расположение.
Затем вернули всё взад, и со второго раза (в первый раз опять криво разместили антенны) повторили прежний рекорд - 1300м, причём на сей раз применили колдунство в виде кручения пультом; оптимальная дальность достижима при горизонтальном расположении пульта и при отвороте его на 90 градусов от аппарата. 😃 Аппарат много раз ловил FS, но связь всё время восстанавливалась без проблем, что говорит о надёжности системы R9. По-хорошему, конечно, надо антенны размещать всё же вертикально, и пульт тоже вертикально ставить, осталось придумать, как это сделать. 😃
В общем, наши тесты показали следующую дальность:
На мощности 10 мВт - 1300 м.
На мощности 100 мВт - 2400 м.
На мощности 500 мВт - 3800 м.
Тесты проводили, пока связь не переставала возвращаться, кроме последнего; там можно было ещё немного улететь, но было уже страшновато. Видео с последнего теста прилагаю:
Это видео возвращения аппарата; из-за особенностей настроек пульта видео завершается при FS, и стартует заново при возврате связи; сооцно видео пути “туда” - кусками; обратно, как видно, обрывов не было.
Приятно удивил приёмник ROTG - с обычной “сосиской” вполне приемлемое качество записи видео на всём протяжении полёта; главное - антенну не ронять. 😃 На шлеме попробовал направленную антенну от AomWay - то ли антенна уже косячная, то ли переходник глючит; обратно летел уже по приборам, вообще ничего не было видно. Патч от Realacc в ремонте, провод поломался, так что приходится изгаляться.
Одно “но” - горизонтальную тряску аппарата победить так и не удалось. Визуально аппарат висит ровно, не унитазит, “бабочки” пропами не выписывает, и тем не менее - сплошное желе на видео. Грешили на подвес; поменяли его на другой, там то же самое.
Также погоняли долголёт Фёдора на 650-й раме от Тарот; после переустановки антенн наверх аппарата он улетел на километр дальности (а на прошлых выходных упирался уже в 200-250м), и намотал на 4s5p (15А/ч) батарейке из литокаловских “шоколадок” 34 минуты полётного времени; причём, скорее всего, можно было бы и больше. Вот у него тряски почему-то нет, видео куда более ровное.
Лето наше кончилось, и не факт, что будет возможность полетать в ближайшее время; пока что думаем, как забороть вибрации.
На этих выходных - очередная часть марлезонского балета, предыдущая часть - тут. В прошлый раз тестили 900-МГгц систему управления R9 от FrSky на минимальной мощности, и упёрлись в размер поляны; путём пристального вглядывания в Дубль-ГИС и Яндекс-карты поняли, что неподалёку есть куда бОльшее поле, причём расположенное вдоль, а не поперёк дороги; так что, в случае чего, можно будет искать аппарат на машине. 😃 Там и устраивали тесты аппаратов оба выходных полётных дня.

Большое поле за Морозово - более 3 км.
Ситуацию сильно осложнял ветер; по прогнозам в субботу обещали 11-16 м/с, причём это в городе, где было относительно спокойно; а за городом, да ещё на поле, было совсем не весело. Однако шайтан-машинам было относительно всё равно; разве что из-за ветра тесты наши могут оказаться не вполне корректными; аппарат даже на месте зависает не ровно, а под немалым углом.
Проводили тесты в трёх разных точках поля; первая - на углу дороги, буквально на техническом проеде (по которому то и дело шастали местные); поэтому там нам не понравилось, и на следующий день точку мы поменяли. Однако именно тут нам удалось поставить рекорд дальности на мощности 10 мВт:

Фёдор настроил отображение режима в ОСД, так что тут связь ещё якобы есть; на самом деле, это между двумя FS, и аппарат уже почти не управляем.
На 100 мВт дальность вышла не впечатляющая - всего-то 2 км:

2000 с небольшим - дальность на 100 мВт мощности
За 2 км дальности начались проблемы с видео; передатчик на аппарате 2Вт, и, скорее всего, упираемся в антенны; патч-антенну, на котором по зиме улетал на 3500, успел поломать, и летаю по пагоде и сосиске, что для дальняков не айс. Но в первый день дальше и не летали. Батарейка была всего одна, и на 500мВт летать до FS, да ещё в такой ветер, как-то забоялись.
Погоняли новый аппарат Фёдора - переделанный из Фантома-2 кадавр на какой-то б/у таротовской раме:

Погоняли его немного взад-назад, затем решили помотать до разряда батарейки (4s5p “шоколадки” от Литокалы, т.е. 15А/ч), но у аппарата был настроена автопосадка под липошки, и намотали всего 17 минут до 13.6В; хотя можно было смело просаживать батарею до 12В. Зато можно оценить полётные условия:
В первый полётный день с собой не брали ноутбук, так что мой аппарат летал со сбитыми настройками PID; его болтало, как цветок в проруби, однако жЫвотные не пострадали. На второй день поехали на то же поле, и встали немного поодаль; на той же прямой, но прямо в поле, в километре от первой точки; там есть техническая дорожка, так что собственно по полю всего метров 10:

Хотя здесь вроде бы максимальное расстояние для тестов, однако условия оказались не совсем корректными - между нами и дорогой - небольшой холмик, который, похоже, частично экранирует сигнал. Поэтому на этой точке у нас не получилось улететь на 10 мВт мощности далее 1 км; на сей раз затестили две разные передающие антенны, штатную “сосиску” и гибкую антенну, результат почти идентичный - 950м и 1000м; причём у гибкой вышло больше; возможна погрешность эксперимента; аппарат выше, антенна выше и т.д.
Эта точка оказалась самой неудачной из всех, однако именно тут мы провели все основные тесты - ещё раз прогнали аппарат на 100 мВт мощности и получили всё те же 2 км:

Ещё один тест на 100 мВт - те же 2км
А также затестили дальность на 500 мВт мощности; пульт ощутимо загудел; на 1000, скорее всего, уже понадобится внешнее питание:

На 500 мВт дальность какая-то совсем не впечатляющая - 2800 м
Для дальних полётов аппарат надо было поднимать сильно выше, но было боязно - во второй полётный день поставили новые, складные пропы; в прошлый раз это привело к жёсткому крашу (из-за частичного складывания “ноги”), так что этот тест, конечно, не окончательный; будем проверять дальше.
Но больше всего вырубили тесты аппарата Фёдора - на 2.4-ГГц системе управления, которая зарекомендовала себя вполне нормально, например, в моей поездке в долину Чулышмана на Алтае, тут аппарат терял связь уже на… 200-250 м дальности! Решили, что это место проклятое, и переехали на новую точку - с другой стороны поляны. Надо было сразу так делать, чтобы аппарат летел “туда” против ветра, а обратно - по ветру. 😃))

Третья точка взлёта - самая удачная
Тут поле идёт немного вниз, и аппарат набирает высоту автоматически, что по идее должно благотворно влиять на дальность. 😉 Снова затестили аппарат Фёдора - вместо 200м у него получилось 500-550 м. 😉 Всё равно не айс, но уже гораздо лучше; скорее всего, что-то экранирует антенны управления.
А затем ещё раз затестили дальность основного аппарата на 10 мВт мощности; на малой высоте (10-15 м) он принялся ловить обрывы связи на 400 метрах; но после набора высоты в 30+ м улетел за 1100м на гибкой антенне, и за 1200 на “сосиске”, без обрывов связи.
Из интересностей - по ветру аппарат разгонялся до… 95 км/ч в режиме GPS; думал, что это невозможно, и GPS-режим физически ограничивает скорость аппарата; ан нет, если бы не обратил внимания, то и больше было бы:
В общем и целом система R9 продолжает радовать; единственный минус, что для получения RSSI-сигнала надо разбирать приёмник куда-то там паяться, а это пока что боязно. Для большинства полётов вполне хватит и 100 мВт мощности; для “дальняков”, скорее всего, понадобится направленная антенна и внешнее питание передатчика, но в целом и из коробки система вполне “летит”.
Из нерешённый проблем - по-прежнему остаётся горизонтальная тряска аппарата, отмеченная в прошлый раз; смена пропов и настройка PID не помогла. Иногда картинка близка к идеалу, но при порывах ветра и при манёврах начинается какое-то аццкое желе. Уже даже шасси почти не трясёт, а вот картинка плавает, даже в шлеме глазам больно. Что бы это значило?
ЗЫ: DVR-скрины сделаны с приёмника ROTG-01, который просто валялся на столе, без ориентации антенны на аппарат; в шлеме картинка лучше.
Первая итерация аппарата описана тут. Если в двух словах, то после прошлогодней гексы этот аппарат идёт куда сложнее, уже кучу раз падал, и казалось, что уже всё; но нет, жив, курилка, хотя кое-что пришлось поменять. В основном намаялся я с системой управления - китайском аналоге OpenLRS, из-за неё пара крашей была, плюс бессчётное число потерянных нервов и запоротых съёмок. Сама по себе система, скорее всего, не виновата; но вот с антеннами у нас полный швах, и все наши колхозы не помогли. После очередного фейла (хотя бы без крашей) в ходе отпуска на Ангаре всё-таки решил предать анафеме старое управление и перейти на R9 от FrSky; результаты - в самом конце статьи. 😉 А пока что обо всём по порядку.
За пару месяцев коллега Фёдор пересобрал аппарат на новой раме, теперь она не текстолитовая, а люминиевая:

Все основные системы остались на своих местах, за вычетом приёмыша управления - теперь он не взаду торчит, а рядом с контроллером; его антенны также не сзади, а в центре, пока что - на временных стойках. Не самое оптимальное их расположение имхо, но так они экранированы от фонящего 2-ваттного FPV-передатчика, который остался снизу. Посадочные шасси переехали с лучей на раму, туда же перекочевал модуль со светодиодом и USB-портом. Суммарный вес конструкции в итоге приблизился к 1400гр; с учётом использования 6s3p батареек из 18650 от китайской Литокалы (800 гр), взлётный вес - 2200 гр.
В первый полётный день проверяли вообще работу новой сборки, и буквально на глазок подстраивали PIDы; как оказалось, даже не был настроен failsafe, что для нового не облётанного аппарата имхо смерти подобно; но обошлось. 😃 Погоняли аппарат на нашей летней поляне, совсем крохотулечной (метров 200-300 от края до края), проблем не обнаружили; затестили полётное время, вышло 38 минут на 6s о 9000мА/ч. Зимой получалось за 50 минут выскочить, но с тех пор и аппарат оброс аппаратурой, и батарейки сейчас другие; аналог VTC6, но совсем не VTC6. 😃)) Всё равно, по сравнению с гексой - практически бесконечные патроны.
Немного потупил с настройкой FailSafe; во всех гайдах написано, как настраивать этот режим для “гонщиков”, а как для “съёмщиков”, пришлось думать самостоятельно. Например, предлагается записывать значения каналов в приёмник при нажатии кнопки FS на приёмнике; но у меня это не получилось; возможно, так сохраняется только уровень газа. Но, разумеется, проще всего это сделать в Custom-режиме, где можно указать вручную, что куда выставить при пропаже связи.
В этом плане заценил менюшку Тараньки Q7; раньше туда попросту боялся заходить, а тут покопался, и всё даже проще, чем в моём старом Devo12; главное - понять, как зайти в меню модели. 😃)) В режиме custom-настройки failsafe всё визуально видно, куда какой переключатель нужно установить; правда, не всё так однозначно, и лучше всё же уточнить фактические значения переключателей на основном экране. Например, тумблер режимов удалось настроить с первого же раза, и с тех пор проблем с собственно включением режима RTH нет; а вот попытки выставить вспомогательные индикаторы ни к чему почему-то не привели; возможно, не сохранились настройки, крутили прямо в поле; будем копать дальше.
Проблема в том, что на аппарате пока не настроено отображение режимов на OSD, и непонятно, сработал FS или нет; у нас есть тумблер, переключающий камеру из видео-режима в фото-режим (FireFly 8s умеет это с помощью специального кабеля с каким-то хитрым мини-контроллером), и можно было бы это использовать для визуального изменения картинки при срабатывании FS (c видюшного формата 16*9 на фотографические 4*3), но пока что увы. Хотя потом настроим, и будет уже не надо. 😉)
Ещё один вопрос знатокам - есть ли возможность в R9 отображать на OSD уровень RSSI?.. Видел в теме обсуждения, что можно, но вот как, загадка. Пока что тоже без него летаем; привык уже постоянно на него коситься, было удобно. А главное - без него категорически усложняется проверка дальности управления.
У R9 есть возможность выставлять 4 режима мощности передатчика; 10/100/500/1000 мВт. Для тестов мы благоразумно выбрали самый “дохлый” из режимов, 10 мВт; не уверен, что там действительно столько, сколько написано, но это точно самый слабый из режимов, Фёдор проверял тестером-индикатором. Юлиан тестил мощность каким-то алкотестером; у него выходило 12 мВт.
Небольшой оффтопчик - когда выбирал, где брать R9, набрёл на сайт HorusRC (где в итоге и взял), и долго думал, не взять ли Тараньку-лайт, с таким же лайт-модулем. Для “нормальных” хоббийных полетушек разница небольшая, но мне в моих поездках, где дроны - дело десятое, компактность была бы весьма кстати. Хорошо, что удержался - тот же Юлиан разбомбил этот модуль в плане дальности; при заявленном максимуме в 100 мВт он выдаёт какую-то совсем никакую дальность.
Поехали мы на наше “запасное” поле, в районе с. Морозово, что в 15 км. от города по дороге. Несмотря на нашу Сибирь, тут сложно найти открытое пространство - одни леса кругом; зимой вопросов нет, летаем на Обском море, там можно хоть ракеты тестировать, а летом как-то немного сцыкотно. 😉 Это поле тоже не очень большое, но хотя бы больше километра. Если бы всё пошло нормально, то можно было бы и дальше забраться, на речку Коён, но попали под дождь, и проехать в глушь уже было опасно.
В общем, наконец добрались до главного теста статьи - попробовали погонять вдаль наш аппаратик; его трясло на ветру, как неизвестно что, при 2.2 кг веса-то:
Но главное - на 10мВт мощности никаких обрывов связи не было; видео изрядно косячилось, а намёков на Failsafe не заметили. Улетели на 1100 метров:

Вид обратно, на “дом”.
Уровень RSSI и режим не отображается, не обращайте внимания. 😉 Можно было бы и чуть дальше, но там уже угол поляны и лес; так что вернулись.
Причём это - тест с гибкой антенной; в стоке передатчик поставляется с обычной сосикой, которая, скорее всего, дальнобойнее. Если бы вывести уровень RSSI, то можно было бы устроить сравнительные тесты антенн, а так волостей на напасёшься.
В общем, пока что впечатления от новой системы управления R9 самые положительные. Осталось разобраться, как вывести с неё уровень сигнала. С аппаратом тоже надо ещё немного подшаманить - победить адские вибрации в горизонтальной плоскости; то ли пропы ни к чёрту (будем менять на складные), либо PID великоваты. Визуально аппарат висит ровно, но по шасси видно, что идёт сильная вибрация. Какие будут советы?..

Долголёт на “большой” поляне; куда-то туда и летим.
Смотался в недельный отпуск в посёлок Мотыгино, что на Ангаре в Красноярском крае. Брал с собой все три своих дрона - малыша Bebop2 (на аве), прошлогоднюю гексу и проект этого года - складной долголёт; все три пригодились, и все - по-разному. 😉 Поездку описал в своём ЖЖ; так что тут - только про дроны.
Основным аппаратом для съёмок у меня проходит долголёт; но с ним обнаружилась некая проблема, которую потенциально пофиксил буквально перед выездом в Мотыгино, и даже не было времени проверить аппарат в воздухе. Первое время не мог выбраться из деревни; летать в райцентре на нестабильном аппарате, да ещё и в разгар ЧМ по ногомячу - заведомый оптимизм; поэтому в первые пару дней запускал только Попугая. Он маленький и стабильный, и им может управлять даже ребёнок; но в первый же осмысленный вылет он у меня… навернулся с высоты ~80 метров из-за разрыва оригинального пропеллера. Никогда такого не было - и вот опять…
По видео видно, что с аппаратом что-то не так; и по звуку было тоже слышно; отпускной расслабон почему-то отключил критическое мышление. Но аппарат… никак не пострадал - кроме разорванного пропа, всё остальное оказалось в порядке (даже пропы), и после замены причины аварии на китайский аналог Попугай полетел лучше прежнего - вот, например, съёмки футбола в этот же день:

Попугай на берегу Ангары, среди лодочных гаражиков
По совету с форума, скорее всего, заменю валы на моторках, и мелкий Попугай ещё послужит Родине.
Но всё это - присказка; сказка началась, когда начали гонять нормальные боевые самоделки. Поехали искать поляну для запуска долголёта; и по пути в соседнее село Решающее встретили… медведицу с медвежатами. Пришлось в спешке ворочаться и летать там, где не так смердит медведами 😉) - возле устья р. Рыбная. Местечко симпатишное, но с трёх сторон речки, так что было тревожно. Недавний косяк аппарата оказался действительно преодолён - в настройках Назы каким-то образом оказался включён IOC-режим, и стик “вперёд” означал всегда “от точки взлёта” и наоборот; но ковыряния в настройках помогли, и аппарат снова начал слушаться управления. Основной косяк аппарата - проблемы с управлением - проявлялся только на земле; улетел на пол-километра и со связью было всё ок.
Правда, в этом тестовом вылете вылез косяк управления камерой - у FireFly 8s есть возможность с помощью специального кабеля (со встроенным микроконтроллером) управлять режимами съёмки и затвором, с помощью трёх-позиционного переключателя; условно говоря, вверх - видеосъёмка; середина - нейтральная передача; вниз - фоточка. Видимо, сослепу физически переключил камеру в фото-режим, и в полёте она наглухо отказалась запускать видео; хотя фоточки делала исправно. Более того - если запускать аппарат при не-среднем положении переключателя камеры, то камера может наглухо зависнуть, и придётся её вынимать из подвеса и физически перестартовывать. Надеюсь, это поправят прошивками; камера неплохая, ещё и с таким приятным бонусом, как удалённое управление.
На следующий день поехали на местную достопримечательность - гору Гребень, которая на деле не совсем гора, а скорее разлом. По земле до неё добраться сложно; поехали на моторной лодке. 120+ метров вверх в горку - и мы на месте:
images.vfl.ru/ii/…/22539591.jpg (5.0 MB)
Вот в таком виде пришлось тащить долголёт в гору.
images.vfl.ru/ii/…/22515638.jpg (6.8 MB)
Долголёт на горе
В первом вылете уже после взлёта обнаружил, что камера почему-то в режиме “узкого угла”, т.е. её обзор даже меньше, чем штатные 90 градусов. Более того - оказалось, что… батарея не заряжена, и летаем из состояния “Storage” 😃)) - но это для обычного аппарата фиаско, а этому чучелу пофиг; отлетали 10 минут до 20В и сели без какой-либо паники. Во втором вылете всё сделали правильно; в итоге получился клипчик на песню местных староверов (чуть выше по Ангаре находится затопленное нонче село Кежма):
У долголёта частенько проявляются вибрации в горизонтальной плоскости, вплоть до желе на камере; причём аппарат визуально летит ровно; что происходит, пока что понять не могу. Видео стабилизировано программой ProDad Mercalli v4; самый брак, ессно, вырезан, и всё равно дрожь местами налицо.
В следующий “съёмочный” день поехали снимать р. Рыбная, и в ходе вылета долголёт снова поломался; отлетели на 700м, ничего не предвещало беды, RSSI на 83% (с провалами до 50, но это, возможно, из-за препятствий); и уже на обратном пути… отвалилась антенна управления. Непонятно, что и как; вроде и под пропы попасть не могла; просто наглухо выбило из крепления и приёмыша, и досвидос. А у долголёта есть дедская болезнь - если что-то происходит с антенной управления, то он не возвращается домой (как в случае штатной пропажи сигнала), а начинает творить какую-то чушь - видимо, “слушает” видео-передатчик. Хорошо ещё, что он просто немного покружился на месте и завис в 500 метрах от взлёта. Если бы такое произошло на Гребне, то было бы вообще непонятно, что с этим делать. А так дошли по бережку до аппарата и связь появилась - на уровне 20-30%, но всё же. Попытался посадить вручную - фиг-то там, постоянные потери сигнала и неадекватное управление, а мы возле речки на оживлённой дороге; пришлось отправлять “домой”; агрегат вернулся в точку взлёта, где его нашёл знакомый по футболу пацан и притащил нам. 😉 После этого окончательно принял решение предать анафеме китайский аналог LRS и перейти на управление FrSky R9; забодали такие расклады. Долголёт в этой поездке отлетался; запасной антенны, разумеется, не было.
images.vfl.ru/ii/…/22515807.jpg (4.6 MB)
Фоточка в дальней точке полёта; мы находимся в сотне метров от подвесного мостика; попробуйте его там найти 😉
Но эту песню не задушишь, не убъёшь - осталась ещё проверенная прошлогодней поездкой Владивосток-Новосибирск гекса. Правда, для неё второго кабеля управления камерой не купил, так что пришлось по старинке включать/выключать запись на земле; а в остальном - чуть большее время подготовки к полёту и существенно меньшее полётное время по сравнению с долголётом, зато почти без тряски в полёте.
На следующий день после аварии долголёта поехали на лодке на песчаный остров, где сняли клипчик про эту самую лодку с моторчиком. У гексы ток висения - под 50А (выше 30А точно), и батареек под неё у меня осталось немного; в ходе недавнего краша долголёта пострадала парочка 3s 3600mAh от HRB, более-менее оптимальная для гексы; остались лишь 5500+6000 и кучка 2200 (по паре в параллель) от ZOP, для Попугая. На мелочёвке поснимал несколько общих планов (начало и конец ролика); а основной угар снят на “больших” батарейках:
Иногда валит подвес; плюс при разгоне до 30-40км/ч пропы лезут в кадр даже при небольшом наклоне камеры; а уж если газовать на полную, то и вообще; некоторые планы пришлось масштабировать и обрезать. Даже 90-градусный угол обзора не помогает
Осталась ещё одна идея для ролика; для неё нужно крайне унылое место, желательно руины или вообще кладбище; ничего подобного в доступности не было; пришлось снова ехать в Решающее - на этот раз медведов не встретили. 😉 Там нашли старые разрушенные советские фермы и поснимали их; может быть, материала хватит на клип, но терзают меня смутные сомнения.
images.vfl.ru/ii/…/22516091.jpg (6.4 MB)
Гекса в Решающем
В последнем вылете попробовал на свой страх и риск погонять на литий-ионках; батарейки от Литокала толком не тянут гексу даже 6 в параллель - специально для теста перепаяли долголётную сборку 6s3p в 2*3s3p, т.е. 3s6p, и в общем-то практически здря - ниже 10В разряжать батарейку нельзя, аппарат разбалансируется и падает; а до этого времени полётного времени - минут 18, т.е. столько же, сколько и на паре липошек 5500+6000. При той же массе ёмкость получается 18А/ч против 11.5А/ч; если бы токоотдачи хватало, то овчинка стоила бы выделки, а так - одно баловство. Только болтает аппарат в полёте больше, чем на липошках, и всё. 😉) Ну, тут не речка и не Гребень, можно было повыёживаться. На фоточке - именно литий-ионный конфиг, уже в стадии разборки.
Также почему-то у гексы начались проблемы с управлением; от долголёта заразилась, не иначе. В этом вылете мы находились возле трансформатора, грешу на это; несколько раз произвольно отключалась запись на камере, а напоследок - и сама камера выключилась в полёте; что это было, Холмс? Грешу на авто-отключение камеры по таймеру - но не во время же записи?.. В последнем в этой поездке вылете на берегу Ангары, на “пионерлагере”, также словил failsafe - хотя там кроме реки и гористого бережка никаких наводок нет. Возможно, за горку залетел… Но вроде, судя по видео, ничего такого. Тут пока что использую старый, доставшийся в наследство от Walkera-350Pro протокол Devo - у него даже RSSI не отследить, но зато всё надёжно как трактор; непонятно, что случилось.
Бум разбираться дальше. Как прилетит R9, начнём по новой мучить долголёт; а там, возможно, и гексу пересадим на этот же протокол. Заказал два приёмыша - стандартный R9M и R9Slim+ - если всё будет окей, можно будет затестить разницу в дальности. А также в планах нашего колхоза установка на долголёт более тяжёлого подвеса с фотоаппаратом; не переключайтесь. 😉)
Пару слов чиркану про проектики, которые в основном реализует коллега по хобби Фёдор, а я так, в качестве комиссара выступаю. 😉) Начало - в предыдущей статье.
Долголёт, который в прошлый полётный день хорошо так шваркнулся метров с 50 минимум, оказался крепче, чем кажется на первый взгляд - пострадали только батарейки (жалко - самые свежие мои липошки от HRB-), трубка крепления подвеса (запас ещё есть), да у камеры SjCam4000 сбилась фокусировка. Остальному аппарату хоть бы что:

Вроде бы и складная конструкция, но ничего, три подряд краша как-то не сильно на ней отразились. Проверили его летучесть - появилось какое-то странное поведение, когда он почему-то летит немного вбок, когда команда строго вперёд (в GPS-режиме); такое впечатление, что включён “интеллектуальный” режим, но нет, иногда всё нормально. Грешу на наводки от ЛЭП на нашей поляне - там иногда с аппаратами творится что попало; попробуем на следующих выходных выбраться на полянку побольше, где наводок нет; посмотрим, как там оно.
Опять не стартовала видео-система (как и в прошлый раз), снова летали визуально; поэтому на дальность толком проверить не удалось. При удалении метров на 150 сигнал упал до 92-93%; это может что-то означать, а может быть, и нет; надо будет ещё тестить на дальность; в недавней поездке на Алтай при управлении аппаратом проявлялись наводки с видео-передатчика; возможно, это будет мешать, а может, и нет.
Ещё один тест полётного дня - ещё одна проверка полёта прошлогодней гексы на литий-ионках - HG2 от Литокалы. В прошлый раз аппарат показал какое-то совсем смешное полётное время на них; в этот раз подошёл более ответственно; хотя и забыл убрать “липошное” ограничение в 10.5В на автопосадку аппарата; до 10.5В аппарат проболтался в воздухе 13 минут. После взлёта напруга просела до 11.7В, почти на вольт - это вам не липошка, тут сопротивление батареи выше 10мОм. До 9В, наверное, можно её просаживать легко; без нагрузки на банке будет выше 3.5В, наверное.
В прошлый раз переживал, что батарейки перегреваются под нагрузкой и могут чуть ли не взорваться; куда там, в этот раз, после 13-минутного полёта, они остались едва тёплыми - градусов 40, не больше.
Надо сказать, что после просаживания батарейки на гексе переставили её на долголёт (в другой конфигурации - не 3s6p, а 6s3p, т.е. последовательно, а не параллельно), минут 8 оно болталось взад-назад, и всё равно батарейки просели чуть ниже уровня хранения - до 3.7В на банку.

Переставляем батарею с уже частично разобранной гексы на долголёт.
Последней частью марлезонского выступил долголёт Фёдора - аппарат слепленный буквально из того, что было; моторки самоперемотанные, пропы от Typhon 500 (13"); сильно подозреваю, что нифига не эффективные. 😉 С батарейкой 4s5p из тех же “шоколадок” от Литокалы показывает примерно полчаса полётного времени; хотя это прикидки, может быть, и больше. На 4s липошке о 3600мАхов отлетал 13 минут:

Продолжаем эксперименты с антеннами; если у моего аппарат после серии мучений сигнал хотя бы не падает ниже 90% по нашей мини-полянке, то у Фёдора иногда падает ниже 50% даже тут. Для 500мВт 433-МГц-системы как-то всё это подозрительно. Будем подтягивать тяжёлую кавалерию в лице коллег по хобби; что-то всё не можем с ними пересечься.
Фиксаторы лучей уже придумали. 😉)) Складные пропы на замену уже в Москве на вокзале; скоро, надеюсь, можно будет сравнить их эффективность в сравнении с обычными карбонками.
Также в планах - эксперименты по управлению камерой с пульта; тут, возможно, замутим небольшой проектик, но раньше времени не буду раскрывать карты. 😉
Давно собирался описать проблемы, с которыми пришлось столкнуться мне и коллеге по хобби Фёдору при построении съёмочного (не рекордного) долголёта; полгода не можем довести аппарат до состояния надёжного использования.
Постановка вопроса - почему, собстно, долголёт
В прошлом году также немало времени угробили на доводку до ума съёмочной гексы; но в итоге получили аппарат, который практически полностью устраивает, кроме размеров и полётного времени; собственно, постоянные упирания в батарейку и заставили заглянуть в тему про долголёты; там сразу задушила жаба, и появилась идея собрать собственный аппарат, который летает хотя бы полчаса в съёмочном режиме.
Из теории понял, что нужен именно квадр (а никакая не гекса), с большими пропами и низкооборотистыми моторами, желательно под многобаночные аккумуляторы - 4S и выше. Народ в теме обсуждает всякое, но у нас артель “Напрасный труд”, поэтому поиском на Али нашёл моторы с KV 360 под 6s, под 15" пропы; собственно, от них решил и плясать.
В качестве полётного контроллера - старая добрая Наза; лайт-версия, прошитая в 2.0. Возможно, не лучший выбор для долголёта на сегодняшний момент, но лучшее - враг хорошего; гекса летает на Назе и не жужжит, делаем по аналогии.
Практика
Раму коллега Фёдор сделал сам, по аналогии со своим аппаратом, с которого снимал виды жемчужины Алтая, долины Чулышмана. Несмотря на 550-й формат рамы, получилось довольно компактно и легко:

Вид сверху на сложенный аппарат

Первая итерация - ещё без ничего, даже без шасси - взлёт с ведра
Один из моторов изначально имел небольшой люфт; поначалу переживали за него, но последующие проблемы показали, что это вообще не беда. 😉) Хотя первый полёт аппарата случился в конце октября, за 8 месяцев дедские болезни так и не вылечили.
У долголёта начались проблемы, обратные ситуации с гексой - с той мы намаялись, пытаясь научить её летать, но после решения проблемы с регуляторами дальше всё пошло как по маслу; тут наоборот, агрегат с ходу полетел, и проблем с полётом практически не имеет; но капец подобрался с другой стороны. Первый же вылет показал, что полётное время у него превышает полчаса даже на небольших батарейках 3600mA/h 6s; сразу же возник вопрос в смене системы управления. Гекса у меня летает с управлением по протоколу Devo, доставшемуся в наследство от Валкеры-350; в реальных условиях связь начинает теряться от 1 до 2 км дальности; для неё это не проблема, ибо батареек всё равно на такие полёты не хватает; но тут-то другое дело.
У Юлиана подсмотрел обзор на дальнобойную систему управления на 900 MHz и… нет, не повёлся, а зря. Уже давно хотел соскочить с Дево (хотя сам пульт Дево12е мне до сих пор нравится, но протокол и набор приёмников - увы), и вот, подвернулся случай; по совету Юлиана прикупил “тараньку” Q X7, самый дешёвый пульт в серии Таранис; но вот вместо проверенной опытным путём системы нашёл где-то на Али систему управления на 433МГгц, от китайской конторы WolfBox, и это было фиаско.
Сама по себе система не такая уж и плохая; замеряли мощность передатчика - вполне соответствует; приёмник тоже вроде бы не тупит; но вот антенны китайцы поставляют - ни в борщ, ни в Красную Армию. А в этом диапазоне не сказать, чтобы есть большой выбор, и ничего не имелось по аналогии; так до сих пор с этой системой и бодаемся. Попробовал почитать ветку про оригинал этой системы, OpenLRS - но там люди общаются на каком-то неизвестном языке, после нескольких вопросов отписался от темы, полезной информации ноль; не доросли мы ещё до мировой революции.
В общем, первые тесты показали дальность управления… 600-700м до пропажи сигнала. Тут есть возможность контролировать уровень RSSI-сигнала, так что видно, как оно пропадает, буквально воочию по FPV.
Возможно, тут ещё немного виноват видео-передатчик; для дальнобойности поставил 2-ваттный Boscam TS5832; и он, скорее всего, фонит по всем частотам, что впоследствии ещё аукнется.
Изначально передатчик шёл с гибкой антенной-диполем, причём ещё и в принципе косячной - длина “усиков” не соответствовала частоте 433МГц; к тому же мы её ориентировали неправильно - усы горизонтально, а не вертикально. Покурив тему, переделали антенну и начали соблюдать поляризацию; дальность сигнала увеличилась, но ненамного.
Фёдор сделал передающую антенну типа “моксон” - большую (из-за частоты) и не очень удобную, особенно в поездках, но после устранения дедских болезней с ней удалось наконец преодолеть предел дальности старого протокола Дево - долетели до острова на нашем рукотворном море, где летаем по зиме:
Дальность 3300м.
На этом проблемы с управлением далеко не закончились; но сделаю лирическое отступление. Параллельно со всеми этими мучениями сделали попытку пересесть со своих старых липошных аккумуляторов на литий-ионки; причём, как обычно в нашем колхозе, на дешёвые копии от китайской Литокала. В отличие от управления, тут нас ждал успех - по крайней мере, для данного проекта.
Про возню с литий-ионками писал в своём ЖЖ-блоге; больше всего боялись за ёмкость кумуляторов, которая оказалась в порядке - при разряде 4.2В -> 3.2В все протестированные экземпляры показали ёмкость около 3000 мАхов; правда, Панасы NCR должны отдавать 3400, но это мелочи, за такие деньги. 😉))
Правда, попытки использовать батарейки от Литокалы в других проектах пока что фейлятся - у них высокое внутреннее сопротивление, и существенно пониженная токоотдача; попытался выгулять на псевдо-VTC6 “попугая” Bebop2, у того ток висения около 10А; не смог стабизироваться и свалился в снег; хотя по идее у vtc6 токоотдача от 15 до 30А по даташиту. Попытка полетать на гексе на батарее 3s6p на HG2 также толком не удалась - после взлёта аппарат начало штормить, и он посадил батарейку до 11В за… 5 минут полётного времени - это при 18 ампер-часах ёмкости! Тут ещё возможна проблема с зарядкой батарейки, будем тестить дальше; но в данном случае это почти оффтоп. На долголётах (что моём, что Фёдора) эти батарейки показывают себя прекрасно, и впервые в дроно-карьере не приходится ежеминутно коситься на уровень батарейки; в -20С как-то намотали… 50+ минут полётного времени, это с подвесом и камерой!
Также при дальних полётах возникла проблема с FPV-антеннами; даже с 2-ваттным передатчиком сигнал принимается на штатные антенны-“сосиски” FPV-шлемов весьма посредственно при удалении на несколько километров. По совету всё того же Юлиана прикупил антенны типа “пагода”; остался не в восторге, у них есть мёртвая зона сверху, да и под дальности не шибко превышают “сосиски”; когда аппарат подлетает к “дому” на большой высоте, сигнал теряется. А вот патч-антенну оценил - она хоть и направленная, но имеет довольно широкую область, и мёртвая зона у неё вся сзади 😉 так что если применять их в паре в режиме Diversity, то получается мега-комбо.
Краши
После удачного вылета на 3+ км можно было бы уже заняться доведением аппарата до ума, но увы - у меня начался съёмочный сезон, и в первом же реальном вылете снова начались проблемы с управлением, а потом всё закончилось крашем. За зиму ни разу аппарат толком не уронили (хотя один раз зацепили дерево, но это было на высоте пару метров над сугробом, практически нещщитово), а вот весна принесла неприятные сюрпризы.
В середине апреля выехал в деревню, где надо было отснять кадры для ролика; увы, при первом вылете управление начало теряться в… сотне метров. Оказалось, в реальных условиях обе антенны - и диполь, и моксон - при транспортировке разболтались, и у диполя выпал из контакта один из усиков, а у моксона вообще потерялся контакт с антенной. Диполь удалось вернуть в строй, и всё-таки один вылет удалось сделать, но лучше бы не удалось - из-за сильного ветра и кривого закрепления батареи она… выпала прямо в полёте:
Падение аппарата с 30+ метров не особо сильно повлияло на него; хотя моторы немного погнуло; даже пропы остались целы. Больше всего пострадал модуль GPS (пришлось менять), да разбился задний экран камеры YI 4k; но она продолжает работать.
Очевидно, надо ваять держатель для батареек по аналогии с гексой, тем более, что размер батареек теперь фиксирован, и батареечный отсек можно делать чуть не как на Фантомах. Но пока решали проблему с управлением, про эту “мелочь” как-то подзабыли.
Что характерно, уже через 2 недели аппарат снова использовал в съёмке; на сей раз жЫвотные не пострадали; моксончик ещё был в ремонте, и летал с диполькой:
Видно, что у долголёта пока что проблемы со стабильностью картинки - если у гексы классическая съёмочная компоновка (камера находится почти в центре масс аппарата), то тут подвес вынесен вперёд, и все болтания аппарата передаются на видео со всей революционной беспощадностью. Возможно, ещё что-нибудь придумаем с виброразвязкой; у подвеса tarot t4 довольно мягкие резинки; может, в них проблема.
С началом сезона кучно пошли поездки; почти каждые выходные куда-то мотался. Самая большая и “вкусная” с точки зрения съёмок - поездка на Алтай, в Уймонскую долину; там аппарат снова упал. Первая съёмка, по пути “туда”, прошла нормально; правда, направленность антенн не позволяет пролетать за машиной, как в поездке в Самаху; пришлось лететь перед машиной, что не так удобно и красочно.
Уже в следующем вылете, в ходе поездки за Тюнгур, пропами перерубило принимающую антенну управления, и на этом осмысленные полёты закончились. Чтобы как можно дальше разнести антенны управления, FPV и GPS-модуль, приёмник закрепили так, что антенна управления оказалась в самом хвосте, сверху; т.е. в опасной близости к пропам; фиксатора для неё опять же не предусмотрели, а она ведь складная - ну, вот как-то разложилась и привет. Огрызок антенны, скорее всего, превратился в 5.8ГГц-антенну, ибо после пропажи связи аппарат перестал возвращаться “домой” - хотя с этим отродясь не было проблем. Хорошо, что дело происходило на открытой местности, и удалось вернуть управление и посадить аппарат; и даже немного поснимать окрестности - но при дальности управления в 100-150м это сложно назвать съёмкой.
Следующий полёт закончился крашем - хорошо, что это был не реальный, а тестовый вылет - пробовали разные антенны на место огрызка; попытка поставить передающий диполь на место принимающей антенны привели к попытке аппарата убежать от нас в деревню; но он через пару сотен метров одумался и вернулся по RTH. А вот установка 5.8Ггц-“пагоды” привела к крашу - хотя она позволила управлять аппаратом до 700м, потеря связи снова привела к улёту, а одуматься не хватило расстояния:
Аппарат уже остановился; разворачивать начал его я сам, управление ещё было; но сразу же после поворота связь пропала, и аппарат зачем-то ломанулся впёрёд, ещё и под углом; собственно, его поведение после обрубания управляющей антенны приводит к мысли о наводках с FPV-передатчика; до того подобных “улётов” ни разу не случалось, хотя фактов пропажи сигнала за месяцы тестов было хоть отбавляй.

Аппарат после падения на Алтае
Несмотря на приличную скорость, аппарат опять же почти не пострадал; все шланги аккуратно рассоединились, что у GPS, что на подвесе; камера отлетела на десяток метров, но продолжала всё старательно писать; летать дальше уже, конечно, не стали, и дальнейшие съёмки делал с резервного “попугая”.
Фёдор снова восстановил аппарат, но в следующем же вылете - снова краш. И снова - влияние мелких недоработок. В этот раз поставили на аппарат складные 15" пропы от Тарот; с ними аппарат намного удобнее в транспортировке, да и по ощущениям летает мягче, чем с “народными” карбонками. Но именно они косвенно привели к очередному падению аппарата.

До вылета
Летаем на небольшой полянке, кругом деревья, и для тестов новой антенны решили отлететь подальше. Временно установленная на аппарат камера SJCam 4000 требует отдельного включения AV-выхода, что на подвесе t4 затруднено; решили лететь без FPV-картинки, визуально. Тесты показали, что на 100-150 метров сигнал почти не изменяется; но даже для такого удаления пришлось поднимать аппарат над деревьями, на 50+ метров. На обратном пути навстречу сильному ветру аппарат… сложил ногу; это в принципе косяк мавико-подобной конструкции аппарата, со складыванием ног навстречу друг другу, нужно ставить фиксатор лучей, там даже дырдочки под это дело готовы, но самих фиксаторов пока что не ставили. Складывание ног крайне неприятно, но в общем случае не смертельно - например, при поездке на Чулышман с аналогичной конструкцией такое случилось в первом же вылете ещё по дороге, но аппарат удалось посадить, и отделались парой сломанных пропов, и дальше нормально снимали. Но тут-то - складные пропы! От них при ударе не осталось даже огрызков, на которых можно посадить аппарат, и он просто свалился на пашню. В отличие от предыдущих случаев, тут мало пострадали моторы (карбоновые пропы сами не ломаются, но гнут моторы), но даже лучи погнуло немного:

После краша
Высота была побольше, чем при первом краше; правда, земля мягкая, но всё равно аппарат приложился сильно. Нужно думать что-то с фиксаторами лучей и креплением батарейки, а также со всенаправленной антенной для съёмок вокруг себя; за проблемами с управлением не успеваем заняться необходимыми для реального применениями проблемами.
Планирую вместо побитой YI 4k использовать на аппарате камеру FireFly 8s, которую уже успел облетать на гексе; у неё есть возможность включать-выключать запись и делать фоточки с управлением с пульта, да и 90-градусный объектив даёт не-колобковую картинку, как у обычных экшон-камер. Так что лапы не складываем, будем доводить аппарат до ума.
Попали ко мне в лапы две китайские зарядки для батареечек - ISDT SC-608 и GoolRC G6 mini, опишу первые впечатления; в основном речь будет про ISDT, которую брал для себя; а GoolRC уже отдал, так что про неё будет совсем бегом и немного.
Сперва, как обычно, лирическое отступление. Почти любой “радийщик” или “моделист” сталкивается с вопросом “умной” зарядки для аккумуляторов; не только самодельщики, но и многие юзеры “коробочных” девайсов получают первую же рекомендацию по эксплуатации - выкинуть родную зарядку и купить “аймакс”. Например, зарядка от не самых дешёвых французских дронов Bebop (у меня на аватаре) не умеет в… балансировку банок. Что уж говорить за продукцию сумрачных китайских гениев, через которую масса народу входит в хобби.
Де-факто стандартом зарядных устройств в хобби уже давненько является iMax B6 mini от компании SkyRC; возможно, это не лучший и не оптимальный девайс, но со своими задачами справляется, и для большинства любительских целей подходит. Поэтому в этой статье буду постоянно ссылаться на эту зарядку - тем более, что сам давно её пользуюсь. Продвинутые любители и “профи” переходят на многоканальные и более мощные зарядки, но за вычетом времени зарядки старый добрый “аймакс” умеет практически всё то же.
Тем не менее, на нём свет клином не сошёлся, и давно в воздухе носится вопрос, а нет ли каких альтернатив “аймаксу”? С недавних пор на рынок ворвалась компания ISDT, основанная в 2015-м году в китайском Женьжене; и сразу зафлудила рынок кучей разнообразных устройств на разные вкусы - от многоканальных зарядок и мощных блоков питания к ним до миниатюрных зарядничков, как раз искомых аналогов iMax B6. При этом качество вполне на уровне. Пока что на стороне ISDT выступает ещё и относительная свежесть линейки - при покупке iMax велик риск купить подделку, а ISDT пока что не копируют. По ценам оригинальный iMax и начальные модели ISDT (Q6 и SC-608) примерно совпадают, где-то $35-50 в зависимости от магазинов и скидок.
Самой популярной моделью зарядки ISDT сейчас является Q6, которую в своё время пропиарил небезызвестный многим Юлиан:
Но я решил не впадать в конформизм и купил ещё более компактный агрегат - SC-608:

Собственно в моём случае причиной покупки стала нужда во второй и мобильной зарядке, для поездок - не взамен, а в дополнение к iMax. Уже давно использую две зарядки, но вторая - подделка на iMax, которая мажет в напряжение и не калибруется; которая годится только для разрядки батареек в режим хранения, да сейчас выступает в качестве… радиатора для блока питания. Поэтому-то и озаботился заменой её на что-нибудь нормальное.
Новичков обычно постигает удивление - оказывается, зарядники в большинстве своём поставляются без блока питания, и иногда на них улетают сравнимые со стоимостью самого зарядного суммы. Можно покупать готовые решения - те же ISDT продают неплохие БП для собственных творений - но наш ли это метод? В качестве замены многие используют БП от компьютеров; а для мобильности неплохо подходят блоки питания от ноутбуков. У меня проблемы с питанием не было - вторая зарядка и так давно на руках, и блок питания для неё также уже давно был, универсальная зарядка для ноутов от Ginzzy (слабовато, но мне пойдёт).
Мобильные зарядки от ISDT поставляются без ничего, без единого шнура; только сам агрегат в коробочке и мини-инструкция на английском; причём единственный непонятный момент - предназначение порта на правом борту агрегата - остался в инструкции нераскрытым. Оказалось - это порт для перепрошивки, для которого требуется переходник с штекера 3.5 на USB, и который продаётся на али рублей за 400. У меня прошивка из коробки оказалась более-менее свежей, я даже и заморачиваться не стал.
Единственное, что заставило немного попариться - разъём XT60 в качестве разъёма питания; в общем случае это никакая не проблема, но к моим мобильным ноутбучным блокам питания пришлось колхозить переходник; благо разъём XT60 у нас самый ходовой, и никаких проблем найти нужный шнурок не оказалось; но кое-кому может оказаться сюрпризом; стоит позаботиться заранее. Проблема общая для мобильных зарядок ISDT, на Q6 то же самое.
Также XT60 является и выходным портом питания, так что любителям альтернативных разъёмов также нужно озаботиться переходниками. В поставке iMax B6 (включая и подделки тоже) - целая россыпь переходников на разные разъёмы подключения аккумуляторов, а тут - покупайте наших слонов. Для опытного хоббиста - не проблема, но новички могут озадачиться. В случае использования XT60 основным разъмёмом (как у нас с коллегой) это скорее плюс, чем минус - не нужны лишние провода.
Итак, после подключения - первые впечатления:

По компактности ISDT SC-608 превосходит iMax; но не сказать, чтобы прямо намного. Более чем вдвое - преимущество в весе - 110 грамм против 235 (у Q6 вес - 119); плюс отсутствие лишних проводов для подключения аккумов. Для мобильности есть некоторый бонус; для обычного домашнего использования - разницы никакой.
Первое, что бросается в глаза - большой и красивый цветной экран, на который входит куда больше информации, чем на перекочевавший с калькулятора “Электроника-61” монитор iMax B6. По большому счёту, разница косметическая, но гораздо лучше видно весь процесс зарядки, не в виде каких-то аббревиатур, а всё с цветовой индикацией. Единственное замечание - верхняя информационная строка, на которой показывается время работы, выполнена таким мелким шрифтом, что людям за 40 рассмотреть будет сложновато. Ну и ещё из недостатков - отсутствие кругового бронирования; всё-таки iMax можно пинать и чуть ли не расстреливать, и ему вряд ли что-то будет, а как поведёт себя стекло ISDT в полевых условиях, ещё неизвестно. Ну, это для меня недостаток, для полевых выходов; кому-то это неважно.
Вторая “фича” проявилась ещё при подключении питания - если iMax B6 питается от 11-16В, то у SC-608 диапазон от 9 до 32В! Надо сказать, ранее меня крайне бесило переключать напряжение на БП при питании ноутбука и зарядки - ноуту надо 18В и выше, а iMax в таких условиях пищит, что “input too high”; не говоря уж за то, что заряжать 4- и более- баночные аккумуляторы проще при повышенном питании зарядки. Для ходовых 2-3-баночных разницы особой нет. Это, пожалуй, самая большое преимущество перед iMax.
В качестве балансировочного подключения используется универсальный слот для 2-6-баночных аккумуляторов, в отличие от отдельных слотов на iMax:

Не так надёжно, зато вполне удобно и компактно - минусом в верхний край, и любой аккум нормально подключается. Сразу после подключения зарядка показывает напряжение на каждой банке; правда, для зарядки-разрядки требуется подключение силового разъёма; возможно, тут ещё я не разобрался и как-то можно заряжатьсятолько через балансировку.
В некоторых обзорах видел жалобы на шум; при зарядке в щадящем режиме (1-2А на напряжении внешнего питания и ниже) агрегат вообще молчит, и если шелестит, то намного тише того же iMax. При разрядке и при высоком токе зарядки включается вентилятор и оно начинает гудеть, но опять же, не громче iMax, и без его епических раскруток вентилятора, более равномерно.
Ещё одна из “фич” агрегата - двух-уровневая зарядка: после фазы “быстрой” зарядки он издаёт писк и меняет индикацию на зелёный цвет; сообщается, что “fast charging done”, и при этом продолжает балансировать банки, заливая дополнительную ёмкость, но уже медленно и печально. По завершении балансировки пищит ещё пару раз, и меняет индикацию на синий цвет. Многие напрягаются, когда видят, что процесс завершён, но зарядка продолжается; но у меня после минимального разбирательства никаких вопросов не возникает.
Для тестов решил погонять свеженькую Li-Ion-сборку из 18650 (6s3p из “шоколадок” LG HG2); 9000mAh заряжать 1А как-то не айс, и решил вломить сразу по-максимуму - 8А, чего мелочиться. При внешнем питании 13В зарядка сразу включила взлётный режим, и через минуту перезагрузилась. Сделал несколько попыток - результат тот же; возможно, дело не в зарядке, а в нехватке питания; БП у меня не очень надёжный. Поднял питание до максимального возможных на БП 24В - процесс пошёл, причём зарядка даже не особо грелась:

8А не выдавала, но 6А - вполне. Правда, при этом БП раскалился до состояния, до которого ранее никогда не разогревался; пришлось подкладывать под него палёный iMax в качестве радиатора. 😃 Но в таком режиме вся эта мега-конструкция по-честному проработала до конца зарядки.
Под конец обнаружил одну из основных на данный момент проблем зарядки - она не умеет задавать произвольную программу зарядки батарей; у iMax есть режим “Batt Memory”, где можно задать в том числе и требуемое напряжение на банку. Ли-ион батареи советуют заряжать не до 4.2, а до 4.18В, и на iMax это реализовать довольно просто; тогда как у SC-608 несколько предустановленных программ, и добавить произвольную мне не удалось. В итоге балансировать 6s-сборку пришлось на iMax. Может, где-то не нашёл какого-то режима.
Разряжает зарядка аккумуляторы током 1.2А для однобаночных аккумуляторов, т.е. 0.4А для 3s и 0.2А для 6s. На четверть вылетанная 6s-сборка разряжалась до режима хранения… 12 часов!

Уж полночь близится, а Золушки всё нет.
Но это, как я понимаю, проблема всех небольших зарядок - B6 mini разряжает точно так же. Палёный B6 разряжает током 0.8А для 3s, и при этом греется как сковорода. SC-608 весь процесс разрядки равномерно жужжал, не шибко громко, и был не очень горячий; примерно как и B6 mini - но при этом он-то пластиковый, а не металлический, остывать сложнее.
Апдейт: еле разобрался, как оно измеряет сопротивление банок. У iMax есть режим “Batt resistance”, где можно посмотреть внутреннее сопротивление на каждой банке:

У SC-608 есть режим отображения сопротивления - в процессе зарядки нужно промотать колесом наверх. Поначалу там одни прочерки, но через минутку там начнёт отображаться измеренное сопротивление побаночно:

Сборка из “ноутбучных” 18650 не отличается хорошим сопротивлением; какое удивление.
Итого, плюсы и минусы SC-608 в сравнении с iMax B6 mini:
- вес и компактность
- информативный экран
- питание 9-32В
- большая мощность для своих размеров (заряжает 6s током 6А)
- быстрая и долгая фазы зарядки с разной индикацией
= умеренно шумит
= относительно долго, но точно измеряет сопротивление
- не позволяет задавать произвольное напряжение на банку (?)
- меньшая физическая прочность (пластик + стекло)
- отсутствие в комплекте каких-либо переходников, а также шнура для перепрошивки
Теперь - пару слов про вторую зарядку сегодняшнего “обзора”, GoolRC G6 mini. В отличие от ISDT, тут не скрываются, что делают клон iMax B6 mini - G6 по размерам и расположению управления в точности совпадает с B6 mini, только оно пластиковое, а не металлическое:

iMax B6 mini, GoolRC G6 mini, ISDT SC-608
По возможностям и управлению - практически полная копия B6 mini; умеет всё то же, после iMax даже переучиваться не надо. Отличий два:
- Пластиковый корпус, весь насквозь дырявый для вентиляции. Нетрудно догадаться, что с аппаратом будет в полевых условиях, при запылённости, в жару и прочая.
- подключение балансировочного разъёма - через такой же универсальный разъём, как и у ISDT; также подключение аккумулятора через XT60. В комплекте идёт переходник XT60<-T-plug.

В щадящем режиме агрегат работает нормально; 3s током 3A заряжает и не греется. Если не фанатеть, то и такое чудо вполне сгодится в хозяйстве. Тем более, что стоит оно более чем вдвое дешевле iMax и ISDT.

Такие вот разные альтернативы проверенному iMax B6 mini.
Несмотря на зиму, наша с коллегой по хобби артель “Напрасный труд” не прекращает свою работу.
Написал статью с обзором объектива PixAero 3.77mm для камеры YI 4k - что-то с ним подозрительное творится, краснит по углам и с резкостью некоторые проблемы; читать тут: http://xommep.livejournal.com/392014.html
Продолжаем проект долголёта; не рекордного, а для съёмки и складного для транспортировки:

Тестовое видео с борта - там ещё ничего не настроено:
Первая проба ли-ионных батарей 18650 в качестве бортового питания не прошла - дешёвый китай напруги не держит, и полётное время получилось в целых 25с (на втором видео в конце). Жду “шоколадки” (LG HG2 или аналог), надеюсь, с ними будет получше.
Перешёл на Таранис (Q X7), и в качестве приёмника-передатчика на долголёте попробовал использовать китайский аналог OpenLRS - WolfBox 433Mhz; без подключения к компутеру, “из коробки”, сия мега-система выдаёт предельную дальность сигнала управления в целых 700м; много думаем. 😃)) Пока что в аппарате и без того проблем хватает, так что ручки до этого всё никак не дойдут; но предупреждён - значит вооружён.
ЗЫ: Добавлена DVR-запись видео вылета 8.1.2018-го, в -20С - снова отвал связи на 1080м (с 4:00); видно поведение RSSI-сигнала (слева-снизу) - он то есть, то нет. Будем бодаться с антенной дальше.
Скатались бандой, которой в апреле покоряли Чулышман, в ещё одно алтайское захолустье; на сей раз в ещё более дикое место. В этот раз брал с собой другой дрон - ту самую самодельную гексу, с которой в августе проехался с Дальнего Востока; так что есть некоторые отличия. Хотя в целом аппарат уже проверен, но выяснились некоторые особенности.
Основная сложность этой поездки с точки зрения дроновода - довольно большая высота над уровнем моря (до 2700м) и низкие температуры, вплоть до -9С в “полётное” время. К тому же практически не было “безопасных” помещений, где можно было бы отогревать технику, жили-то в палатках, так что батарейки и всё остальное находились всё время в уличных условиях. Что приводило к сокращению полётного времени с 16-20 минут в идеальных условиях до 5-8 минут. Причём даже утепление батареек, которое планировал учинить в ходе поездки, тут скорее повредило бы, чем наоборот - оно бы работало как холодильник, а не как утеплитель.
В общем, пришлось летать так:
Высота 2500
Высота 2700
Надо сказать, что к подобному экстремизму мы были не совсем готовы даже морально; хотя и видели по прогнозам температуру до -15. Техника же отработала нормально, на своём обычном уровне, со скидкой на заморозку батарей.
Когда спустились с гор между Кош-Агачем и Джазатором, зима кончилась, и жить стало веселей; батарейки перестали так сильно мёрзнуть, и полётное время чуть увеличилось, хотя и по-прежнему осталось в пределах 10 минут; высота ~1600, температура 0-+5С.
Музыка - дуэт “Керуен” из Кош-Агача, райцентра этих мест; мы с ними лично знакомы, так что вот. В Кош-агачском районе проживают не только и не столько алтайцы, а в основном казахи, так что и музыка - казахская:
На обратном пути снова заснял епический проезд по горкам; увы, всю дорогу валил снег, и к тому же кончились батарейки, и сломалась зарядка; прямо по пути нашёл недовылетанные батарейки и от Попугая, причём разные, на них и устроил последний пролет поездки, по причине скудности батарей - одним кадром, без монтажа:
Высота обратно 2500.
Гекса в лесах у р. Джазатор:

Несмотря на то, что в дальневосточной поездке сломал вторую антенну на шлеме, видеолинк не подводил, скорее упирался в дальность управления; приёмник 1002 + пульт Devo-12E приводили к потерям сигнала уже в километре - правда, это над лесом. Зато пролёты за авто проходили на удивление гладко, сигнал ни разу не терялся - ни видео, ни управление; хотя на машинке, как видно, навьючено всякого.
Для контроля полёта брал наземный приёмник Eachine ROTG01, выдавал “второму пилоту”; в самом начале полётов начались проблемы с коннектом девайса к планшету, но, оказалось, это разболтался USB-разъём в моём старом Нексузе7; по телефону леталось нормально. Весьма полезно иметь дополнительный контроль полёта - например, в вылете в долине Коксу пару раз терял машинку из вида, и помогали как раз советы второго пилота. Полезная штука.
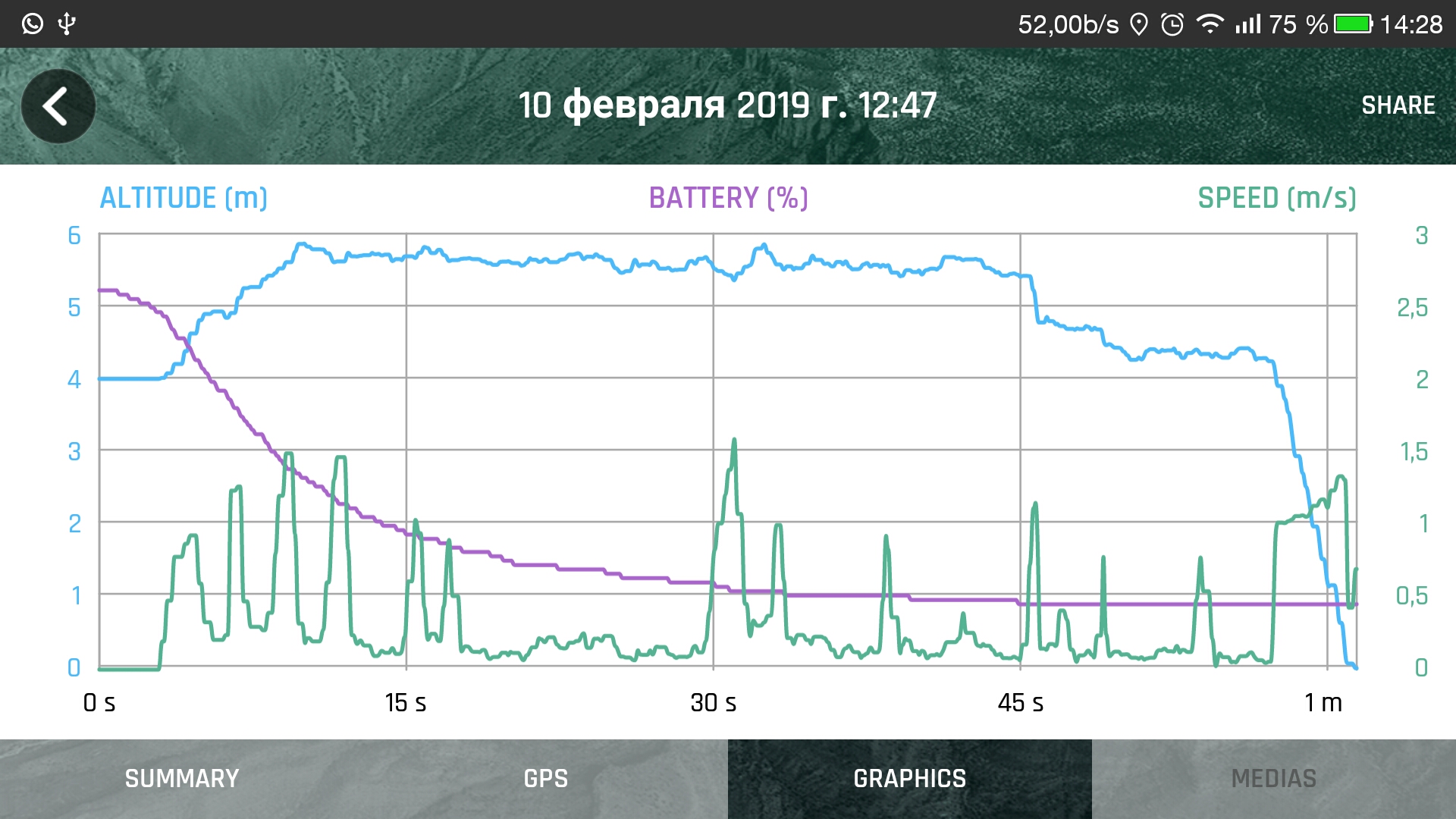
Отдельно выскажусь за резервный дрон Bebop2, который беру с собой как игрушку мужикам; он пригодился в этой поездке для разведки, ведь жрёт вчетверо меньше батарей, чем гекса, и собирается в разы быстрее. Без пульта, с планшета, ранее отлетал на нём в идеальных условиях на 500+м, что для разведки вполне достаточно; пару раз использовали его, чтобы посмотреть дорогу впереди. Но снимает он в около-нулевую температуру просто кошмарно:
Гекса снимает в 4к, Попугай - в FHD; итоговое видео пришлось сжимать в FHD; Попугаю это не шибко помогло. Фризы на видео - моменты съёмки фоточек (DNG по 25-30Мб).
Брал его в единственный более-менее большой пеший выход на горку; может быть, ещё смонтирую оттуда видосик, но, в общем, печаль-беда. Зато вот такие фоточки оттуда есть:

Попугай на горке в 300м над лагерем.
Жизнь наша тягостная продолжается; в ближайшее время планируем реанимировать проект долголёта, и опробовать в деле камеру от Sony с оптическим стабом. Летать на Мавиках - конформизм, такое моё мнение.
ЗЫ: подробное описание поездки - тут.
Проехались с друзьями с Дальнего Востока на машине - от Находки (под Владивостоком) до Новосибирска, это с заездами больше 6000 км. Про само по себе путешествие пишу целую серию статей в ЖЖ, здесь хотелось бы осветить поездку с точки зрения дроно-съёмки.
Собстно заради таких поездок и увлёкся хобби - кто-то летает, чтобы летать, а я - чтобы снимать и по-иному смотреть на мир. Как раз первая подобная поездка совпала с доведением более-менее до ума самодельной гексы; делал не я, а коллега по хобби Фёдор (alibaba на этом форуме), по моему заказу. 😉 В этой поездке получилось не всё задуманное, но в целом результатами вполне доволен.
Первая проблема, с которой потенциально можно столкнуться - провоз дрона в самолёте; с этим могли возникнуть проблемы, но обошлось. Летели рейсом S7, с ограничениями на багаж и ручную кладь; дрона вёз в ручной клади в большой сумке, вместе с пультом, FPV-шлемом и всеми остальными шурушками. Боялся, что зацепятся за батарейки - они у меня просто навалом в кармашке лежали, причём если следовать букве закона, то их там многовато. На крайний случай отправил другим маршрутом резервного дрона Bebop2, и можно было бы на его батарейках полетать (в спарке), но это было бы суровым ограничением и изрядным гемором - но всего лишь спросили, “что у вас в сумке”, и даже открыть не попросили. Обделался лёгким испугом.
Также боялся, что регулярные складывания дрона приведут к случайному пережатию каких-нибудь проводов - они вроде и зафиксированы, но мало ли чего. В итоге после Читы дрон уже ехал в разложенном виде почти до дома.

На жёрдочке в Находке

В бухте Тунгус в Находке. Вдали летят… бабочки
Забайкальскую часть поездки аппарат провёл в таком виде:

Не очень технологично, но ничего, жЫвотные не пострадали.
Брал с собой FPV-приёмник для гаджетов - Eachine ROTG01, крайне полезная штука в таких поездках:

Второй пилот Наталья нарушает технику безопасности - приёмник надо держать, а не бросать на шнуре как попало.

В полях между Забайкальским краем и Бурятией

В селе Хасурта в Бурятии, на фоне реставрируемой старообрядческой церкви

В Хасурте

В Хасурте, летаем с местным населением 😉
На Байкале хотели устроить мега-съёмки, но погода подвела - сильный ветер, местами дождь, но не удержался и всё-таки полетал немного, хотя это было на грани экстремизма:

Монастырь на берегу Байкала

На берегу Байкала. Никто никуда не летит, аппарат просто борется с ветром. Тактическая обстановка сразу после посадки.
Примеры фоточек с дрона:

Находка; скриншотик с видео

Трасса Владик-Хабаровск, фоточка

Мостик через р. Чикой, скриншот (Забайкальский край)

Село Хасурта с высоты 480м, фоточка, Бурятия.

Стелла города Мариинска и прочие достопримечательности; скриншот
Видео пока обрабатываю; приведу примерчики:
Про мостик в с. Архангельское в Забайкальском крае
“Этнографический” ролик по с. Урлук, в Забайкалье.
Больше 20 изображений и видео не вставляются, поэтому примеров будет немного 😃
На днях получил приёмник FPV-сигнала с OTG-выходом на гаджеты - Eachine ROTG01. Покупал на Банггуде, дошло за 17 дней, что для бесплатной доставки БГ - прямо пулей; осталось проверить, что это за чудо. Первые тесты оказались впечатляющими.
Приёмник поставляется вот в такой симпатишной коробочке:

Коробочка маловата для антенны, она влазит в неё с большим трудом, но всё остальное входит нормально, даже проводок умещается. Комплект поставки - приёмник, антенна, проводок, коробочка:

В принципе это всё, что нужно для полёта. Настройки у приёмника производятся единственной кнопкой: долгое нажатие - скан каналов, короткое - переключение на следующий:

Видео-тест поиска каналов приёмника в условиях работы двух передатчиков:
Некоторые граждане жалуются на “родной” проводок, у меня он тоже сперва не завёлся - но OTG-проводки в принципе односторонние, просто нужно втыкать нужной стороной. Первый тест проводил с OTG-переходником - всё работает, сигнал идёт.
Вес приёмника - 19 грамм, с антенной - 25:

Для использования приёмника необходима поддержка OTG и UVC-технологий в гаджете; мои старенькие Nexuz7 и YotaPhone2 с этим вполне справились. Проверить совместимость можно программой под ведроид TestUVC. А вот прошлогодний дешманский Vernee Thor почему-то не завёлся; хотя, может быть, просто со шнуром не разобрался.
Также для просмотра видео на гаджете потребуется программа типа EasyCap или что-то про FPV: пользуюсь FPVDroid; всё хорошо, но эта программа не позволяет развернуть изображение на весь экран, и в этом минус. Но программ великое множество, выбирайте сами. Буду рад совету, какую программу использовать для полноэкранного просмотра картинки, с возможностью записи картинки.
Домашние тесты показали неплохие результаты, и осталось проверить дальность передачи картинки - например, в весенней поездке на Алтай схваченный на скорую руку FPV-монитор оказался бесполезен из-за дальности приёма в… 30 метров.
Зимой мы летаем на Обском море, где практически нет ограничений по дальности; как минимум, улетали на 2 км с аналогичным передатчиком и по шлему SkyZone V01 (дальность сигнала управления и видео не максимальное, побоялись дальше из-за возможной просадки батареи). Но летом на море летать как-то не очень 😉, поэтому летаем на поляне с другой стороны Академа, где кругом деревья, рядом ЛЭП и максимальная прямая - метров 150-200. Пришлось извращаться, стартовать почти что из-под ЛЭП (там у многих аппаратов сносит крышу, и на видео заметны помехи сразу после взлёта); однако даже с учётом помех и лесистой местности улетели на… 600 метров, и сигнал не пропал. Более того - качество сигнала на планшете и в шлеме с diversity и направленной антенной было вполне сопоставимо по уровню помех даже на максимуме дистанции! Одно “но” - во второй части теста, при подъёме аппарата на 200м, сигнал начал теряться, но это исправилось ориентацией антенны вверх.
Качество картинки на планшете (и телефоне) несколько хуже, чем в шлеме; там пикселизация не так заметна; однако помех в шлеме едва ли не больше, чем на планшете.
Смотреть с субтитрами.
В качестве передатчика использовался TS5828, камера - FireFly 6s, AV-выход. Носитель FPV - самодельная складная гекса.
В общем, имхо крайне полезная в хозяйстве вещь, для дублирования FPV-сигнала, в разных целях.
Апдейт: прилагаю сравнительное видео сигнала с этого передатчика, и DVR-записи с приёмника в шлеме Skyzone SJ V01:
DVR-модуль приколхожен к шлему ручками.
Видно, что качество сигнала в дорогом шлеме, конечно, получше, но по мощности приёма они друг друга стоят. Улетели на 1380м и дальше поляна кончилась; улетать в лес побоялись, батарейка уже подсела.
Вот ещё одно “сравнительное” видео - полёты на малой высоте, к вопросу о качестве картинки.
Внимание интересующимся!
Недавно с коллегой по хобби Фёдором выяснили, что сейчас Али отправляет по запросу Eachine ROTG01 несколько другой приёмник, см. фоточки:

Слева - что посылают сейчас, справа - оригинал. Отличия - в отсутствии упаковочной коробочки, в оформлении приёмника в термоусадке, а не в коробке, и в отсутствии AV-выхода.
Недавно писал статью про съёмочные дроны; собственно, продолжается эпопея с доведением до ума самодельного агрегата для съёмки. На нонешний момент “коробочные” дроны от DJI и прочих производителей далеко перегнали возможности простых любителей, но по цене у нас до сих пор есть некоторое преимущество (по крайней мере у тех, кто не заходит в хобби с нуля); также есть простор для фантазии и колхозинга; а, главное, сама возможность взять и слепить агрегат из дерьма и палок. Тем, кто занимается исключительно съёмками, наверное, подобные метания не интересны, но любители на то и любители, что заниматься подобной белибердой любят. 😃
Первой более-менее живой итерацией съёмочного дрона получился аппарат на 550-й раме, на котором немало полетал ранней весной над лесом и замёрзшим Бердским заливом. До того была ещё целая эпопея с приведением аппарата хотя бы до такого вида; но с тех пор аппарат ведёт себя более-менее предсказуемо.
Но у меня воздушная съёмка - не основное хобби, и идёт прицепом к различного рода поездкам, куда втиснуться с огромным не-компактным агрегатом не всегда получается. Опыт “лесных” полётов показал, что данная рама для меня не подходит сразу по двум причинам - и не-компактности, и излишнему весу, из-за чего полётное время совсем не адекватно поставленным задачам - менее 10 минут для батарейки 5500mAh 3s, и масштабируемость под большим вопросом - аппарат и так перегружен. Поэтому на нарисовавшийся вскоре набег на долину Чулышмана на Алтае пришлось брать с собой складной аппарат коллеги Фёдора, который и собирает все мои агрегаты. 😃
В условиях пеших переходов по горам складешок показал себя более-менее пригодным для съёмок, но также не без проблем - технология складывания лап а-ля Мавик (ноги вбок навстречу друг другу) два раза чуть не привела к потере аппарата - сперва одна нога сложилась в воздухе, а потом при аварийной (случайной) посадке аппарат не смог взлететь с горы также из-за складывания лапы, и пришлось его оттуда снимать. Так что надо было думать над какими-то другими вариантами.
Решение придумалось такое - если масса апарата великовата для тяги моторов, то их можно увеличить числом, и поставить 6 моторок, превратив раму в гексу. Со складыванием аппарата чуть сложнее, но и с этим ещё в прошлом году обсуждали с другим коллегой по хобби - есть вариант складывать лапы вниз, как на Yuneec Typhoon H.
Раму выпилили из люминевых труб квадратного сечения; закладывались под 10" пропы моторок DJI 2112. Вышел 530-й размер рамы, к тому же гекса, но в сложенном состоянии относительно компактно и вполне транспортабельно:

Шасси также складные, закреплены на двух лучах; фиксируются не сказать чтобы хорошо, но вполне хватает для установки аппарата:

По сравнению с Фантомом (самодельный Фантом2), конечно, выглядит монструозно:

Летает неплохо; снимает пока что не супер; заметна небольшая качка аппарата:
В качестве камеры по-прежнему использую FireFly 6s; за свои деньги снимает весьма неплохо; в последнее время по-простому снимаю в 4K - битрейта не хватает для по-настоящему качественной картинки, зато видео без проблем можно просмотреть хоть на древнем ноуте. На Алтай брал с собой камеру YI 4k, но уже по приезду стукнул её объективом и теперь борюсь с артефактами картинки; как побежду, буду думать над креплением её на аппарате - у неё вдвое больший битрейт, 30fps для 4К (против 24 у FF) и 60fps для 2.7К (против 30 у FF); но придётся переделывать крепление подвеса.
Да, подвес также заменён - в лесу и на Алтае летал с подвесом FeiuyTech Mini 3D, у которого как-то произвольно появляется мелкая дрожь; логику мы пока не поняли. На Али прикупил Tarot 3D III; вроде как улучшенную версию известного T4-3D, причём по цене дешевле, чем тут на барахолке народ подержаными барыжит (меньше 7 тыр со скидками вышло). Замечательный подвес, тем более за такие деньги; правда, в настройки режимов пока не лазил, работает как из коробки.
Проблема в небольшой качке аппарата, похоже, в некорректной балансировке - он сбалансирован только вдоль “ножной” оси, а на двух других слегка сбита центровка из-за вынесенного вперёд подвеса; скорее всего, это приводит к небольшой качке аппарата, заметной на видео:
Несмотря на складную конструкцию, аппарат уже пережил небольшой краш - ну, как небольшой, для кого-то такой “бум” мог бы закончиться плачевно:
Тут, можно сказать, сам дурак (обычная причина всех крашей 😃) - забыл, что мощность сигнала пульта выставлена в минимум (для настроек дома), и при пропаже видео-сигнала оказалось, что управления давно уже нет. Обычно наоборот. При падении поломалась нога и немного поцарапались пропы, но даже их балансировка не нарушилась.
Пока что больших съёмочных мероприятий не планирую; однако в середине августа едем в большую авто-поездку по маршруту Владивосток-Новосибирск, к этому моменту надо быть во всеоружии.
Апдейт: забыл указать ещё важное замечание - в недавней поездке на Алтай летал на стандартных пропах от Ф2 - 9" самозатяг; с ними, что удивительно, аппарат вёл себя неадекватно у земли - после взлёта начинал неконтролируемо набирать высоту и останавливался где-то на 15 метрах, до того плохо рулился. Заменили пропы на 10" карбоновые 1036 - летает и у земли стабильно, слегка погуливает, но на уровне Ф2, что имхо очень неплохой вариант. На пропы наклеил “Моментом” гайки от моторов и получились самозатяги - очень удобно. 😉 А вот пропы от Сяоми-дрона не подошли; с ними аппарат болтает так, что летать невозможно; хотя по размеру и встают на моторы.
Недостаток гексы - она жрёт чуть больше, чем квадр, и если на складном “мавике” можно было летать на батарейках 2200 mAh, то на гексе они попросту вздуваются. На батарейках 3600 mAh летает около 10 минут; на паре 3600*2 полётное время - 18.5 минут. Такое же время показывает пара батареек 2*5200 от Валкеры-350-Про, но они уже старые и падали бессчётное число раз. 😃 На паре ZOPовских аккумов 5500+6000 (массой 2*400гр) отлетал 17 минут, но это именно полёт, а не висение - намотал более 3 км по поляне. Не шедевральное время, но ещё и не вечер - поднастроим аппарат, возможно, облегчим за счёт более корректной балансировки подвеса.
Апдейт: после перебалансировки аппарат стал снимать гораздо стабильнее. Масса дрона без батарей и пропов - 1335г, пропы добавляют ещё 82 г, итого около 1420г веса без батарей. На паре батарей от Walkera 350Pro (или 3600 от HRB ), каждая массой по ~300г, летает около 18 минут, при взлётном весе ~2 кг.
Апдейт2: в 2018-м году снимаем на камеру FireFly 8s (90-градусный объектив)
Скатался в поездку в Горный Алтай, которую анонсировал ранее; описание поездки с фоточками и видео есть в моём ЖЖ (очень много всякого).

Вид на р. Чулышман с высоты 400м над Каменными Грибами.
Эту поездку можно охарактеризовать как “ад для дроновода”, ибо электричества не было, связи не было, инета ессно тоже; все походы пешком; единственное, что в лагере была машина, от которой можно было заряжаться, многодневных “диких” выходов не было.
Как говорил в прошлой статье, вместо относительно проверенного в местных лесах переделанного “Фантика” пришлось брать с собой складной дрон коллеги Фёдора, который изначально не конструировался как съёмочный. Хотя, надо сказать, что он отпахал на все сто, и если бы не мой косяк в середине поездки, то пахал бы до упора.

Складной дрон на базе Назы в долине Чулышмана
В качестве камеры использовал относительно старую проверенную FireFly 6s; прямо перед поездкой с Али прилетела новая камера YI 4K, которую я даже умудрился вкорячить на резиночках на подвес, но она криво задружилась с OSD, и в итоге использовал её только на земле. Всю зиму FireFly мазала мимо экспозиции, но с приходом весны окстилась и отработала нормально.
Основная проблема поездки - это низкая компактность оборудования. Всю поездку люто завидовал Мавиководам, которые могут запихать своего кадавра в небольшую сумку и в ус не дуть; у меня же агрегаты занимали немаленький рюкзак, и кроме него ничего не взять с собой. Наверняка что-то можно придумать более кошерное, но из-за спонтанности сборов использовал то, что под рукой - в рюкзак пришлось пихать без каких-либо каркасов и сам дрон, и пульт, и FPV-шлем, и батарейки. Мало того, что это занимает много места, так ещё и собирать технику приходится кучу времени; хотя кадров прикольных можно было бы наснимать по пути немало.
Улаганский перевал, 2080м над уровнем моря.
В первом же полёте почему-то сложилась одна из лап аппарата (скорее всего, сам недозафиксировал из-за всё той же спешки и массы телодвижений по сборке), и мало того, что видео недоснял; так ещё и поломались пластиковые пропы, на которых предполагалось летать. Пришлось поставить карбоновые 1038, не таким эффективные в этой конфигурации дрона, из-за чего полётное время изрядно сократилось.
Долина Чулышмана - по сути ущелье, и часто летал не взад-назад, а вверх-вниз, чтобы показать горки и прочие окрестности:
Перевал Кату-Ярык, подъём вверх на 400м (и не только на дроне 😃)
При взлёте над собой на большую высоту сильно портится видео-сигнал (хотя по горизонтали отлетали ранее больше чем на километр); даже применение двух разных антенн на шлеме не спасет - у меня сосиска + направленная, и всё равно качество вот такое:
Буквально перед поездкой Фёдор вшил мне в шлем DVR-рекордер от Eachine,
которым старательно записывал все вылеты - правда, иногда забывал включать или выключать. 😃 Пригодилось потом при разборе полётов для определения высоты и дальности, а однажды - как раз на приведённом выше видео - чуть не пригодилось для поиска дрона. Из-за моей ошибки (и не подпружиненного стика газа на новом для меня пульте дрона) дрон сел на гору, и пришлось туда лезть и искать его на высоте 220м над лагерем.
Смотреть до конца 😃
При “посадке” опять сложилась одна из ног; иначе дрон, возможно, смог бы взлететь и вернуться своим ходом, но увы. В ходе попыток “спасения” он перебил себе какой-то из проводков GPS, и в дальнейшем мы на нём не летали - так, подняли в воздух для проверки, но он не переключался в GPS-режим, а в горах летать в ATTI - это заведомый оптимизм; один раз уже слазили на горку, хватит.

Себячка на горе - спасатели, вперёд!
Снято камерой дрона, заляпанной при падении - не заметили, поэтому такое пятно по центру.
Даже отвёртки не было с собой, чтобы сложить передние ноги дрона - так спонтанно снарядились в поход на горку.
Дальше пришлось летать на дроне Bebop2, который взял с собой как игрушку для остальной команды - чисто показать, как оно, летать по FPV. Все тему заценили; после самоделкина Попугай прямо лютый гонщик, и разгонялся у нас до 72 км/ч в полётах от горки до горки. 😃 Но вот качество видео - как всегда, увы-увы:
Тут, конечно, ещё и темно уже было; но FireFly сняла бы лучше.
В походе на самый большой на Алтае водопад Учар вообще люто завидовал Мавиководам - прыгать по горам 4 часа кряду с монструозным пультом для Попугая это просто караул. Сам-то дрончик совсем маленький, зато пульт к нему, с шлемом да батарейками - килограмм дохрена.

Транспортабельность Bebop2 оказалась даже ещё ниже, чем у самоделкина - в один рюкзак всё не поместилось, пришлось рюкзак дрона отдавать коллеге по несчастью, а самому тащиь пульт со шлемом.

Вон он, Попугай, в квадратном рюкзачке
Если бы хоть снимал нормально, ещё бы можно было понять такие трудозатраты - но увы, качество видео много хуже, чем у самоделкина+FireFly:

Больше фото и видео - в отдельной статье в ЖЖ.
Сейчас уже работаем над новым съёмочным дроном - надеюсь, качество удастся улучшить. Но хорошо, что показать красоты тех диких удалось хотя бы так.
После долгих мучений с пересадкой мозгов Фантом-FC40 на 550-раму наконец удалось сделать несколько осмысленных съёмочных вылетов, о чём недавно писал.
Это, конечно, не Фантом3-4, однако качество уже более-менее приближается к тому, что хотелось бы видеть; скоро придёт камера Xiaomi YI 4K; надеюсь, это решит проблемки с общим качеством картинки.
В ходе проведённого недавно фестиваля внезапно нарисовалась возможность поехать в Горный Алтай - причём не по обычным туристическим местам, а на дикий южный берег Телецкого озера; ещё и с пешими выходами на какие-то адские водопады.
В связи с этим возникла проблема - переделанный “фантик” в нонешнем виде практически полностью нетранспортабелен; его можно переносить на сотню метров, если больше ничего не делать, но куда-либо везти крайне сложно - размах винтов и крыльев… Давно уже гуляет мысль переделать его в складной агрегат, и уже даже начаты работы по пересаживанию его на раму складной гексы, но пока что там самое начало; а ехать уже через неделю. Везти с собой в качестве съёмочного дрона Попугая (на аватарке) - как-то не айс, уж больно паршиво он снимает; к тому же для него ещё холодно.
В ходе обмена опытом с коллегой по хобби Фёдором решили обменяться дронами - я ему оставляю своего мега-“Фантика”, а он мне отдаёт свой складной дрон, также на базе Назы (только Лайт). В эти выходные, собстно, и занимались обкаткой складного дрона.
У моего “Фантика” кроме транспортационных проблем ещё явные проблемы с энергоэффективностью - на батарее 3s 5500 он летает максимум 13 минут (в спокойном режиме); на “спарке” 2*2200 продержался и вовсе… 7 минут (в двух последовательно вылетах). При взлёте чувствуется, что он отрывается почти на пределе тяги. Уточнение веса показало, что без батареи он весит 1310гр, плюс батарея ещё 450 - итого почти 1800 полётого веса.
В то же самое время складешок Фёдора с почти теми же характеристиками весит на 300 грамм меньше - 1010гр, и на той же батарее показал 18 минут полётного времени. С более лёгкими батареями 2200 шуршит валенками около 10 минут. Возможно, тут ещё дело в моторах другой серии - на моём стоят 2212 “красной” серии, а на складном - 2212 “желтые”. Ещё к тому же поменяли карбон-пропы 10*36 на “штатные” 10*45, зато куда более дешманские.
Скорее всего, джидаевским 2112 просто тяжко тащить такой вес; будем переделывать раму в гексу - с двумя “призовыми” моторами должна повыситься эффективность; возможно, и с массой получится что-то придумать.
Из проблем со складным дроном - решили не переставлять приёмник, и вместо моей громоздкой Devo12e придётся использовать бюджетную аппу Турнига, которая совсем неплоха с точки зрения управления (разве что крутилка подвеса находится как-то совсем неочевидно, в шлеме на ощупь фиг найдёшь). Но у неё не подпружинен стик газа, что превращает съёмку в какую-то акробатику 😉) придётся привыкать. По дальности, как ни странно, всё более-менее хорошо - при использовании передатчика 600 мВт и обычной антенны от роутера на передатчике 😉) уже улетали на километр; возможно, и дальше улететь получится. Тем более, что в горах сильно далеко летать и некуда.
Из более-менее серьёзных переделок - установка 3D-подвеса вместо самодельного 2D, и замена камеры.
Если всё пойдёт как надо, то в конце апреля будет что показать. 😉
Продолжу тему описания мытарств с самодельным дроном; после тестовых полётов хотелось уже проверить агрегат в действии. Хотя по планам была съёмка клипа в городе (что чревато), выпала оказия полетать-поснимать дедский загородный лагерь “Россия молодая”; чем и занялся.
На всякий случай взял с собой и самоделку, и Попугая (Parrot Bebop2); но мелкого даже не вынимал из сумки. Основные вылеты планировал делать с берега “моря”, что прямо за лагерем, но там оказался закрыт выход, и пришлось взлетать прямо с территории. А там кругом - лес.

Взлётка - в основании буквы V между корпусами.
В первую очередь переживал не столько за агрегат, сколько за “зрителей”, которые набегут в процессе полётов - однако удачно выбирал время и место, так что ни разу не собиралось больше трёх зрителей, из которых был минимум один взрослый. К тому же большинство детей сидело в помещениях на занятиях, так что с этим проблем практически не было.
Основная проблема - в погоде. Весь март стояла стабильно хорошая погода - днём +5, ночью -10, и особо без ветра; и вот накануне фестиваля началось: потепление, грязь, тучи и ветер. В первый день пошёл натуральный дождь, и я уж думал, что зря привёз аппараты вообще - но к утру второго дня развиднелось; правда, поднялся сильный ветер. За аппаратик было страшно, но он вполне справлялся даже с порывами, даже находясь в опасной близости к деревьям; иногда относило в сторону, но вполне контролируемо.
Два раза в процессе вылетов чуть не произошёл улёт - на пределе дальности управления (тут ещё корпуса мешали) аппарат не включал RTH, а почему-то продолжал движение прежним курсом. В первый раз удалось его вернуть включением режима RTH, а во второй раз, во время фото-вылета, аппарат ломанулся вперёд так активно, что и видео, и управление пропало сразу и насовсем - только в 500 метрах от взлётки он сообразил, что пора домой.

Грешу на вышку на горизонте; но летел-то он не к ней, а почти ровно под 90 градусов, в том же направлении, что и до потери сигнала. Фото в момент авто-разворота “домой”.
В “улётах” в основном, как обычно, виноват пилот - потерял ориентацию в воздухе, и в попытках найти главный корпус фестивального лагеря удалялся в лес, да так, что сигнал экранировался ближайшими зданиями. В последнем вылете уже научился ориентироваться в окрестных ёлках, и всё прошло гладко, хотя улетел чуть ли не дальше, чем в “улётные” моменты.
Технически подвёл подвес Feiyutech Mini-3D; постоянно валил горизонт - такое впечатление, что не справлялся с ветром. К его приколам при разворотах я уже давно привык, но в некоторые моменты он не мог стабилизироваться и при зависании - грешу только на сильный ветер.
Также из технического брака (кроме очевидных пропов в кадре и тени от них) - тряска в горизонтальной плоскости; пока камера смотрит в горизонт, картинка практически ровная (снимал с включённым программным стабилизатором картинки); а как вниз наклоняешь, так прямо дрожь земли. Где-то идёт вибрация, но с ней, скорее всего, особо не будем разбираться - в планах переделка аппарата в гексу, с полным пересбором.
Камера снимает более-менее (для китайской камеры за 6 тыров); к сожалению, заказанную ещё в ноябре Xiaomi YI 4K (не путать с обычной YI) наша героическая почта потеряла; заказал новую, пока не пришла. Уже думал взять GoPro5, но как-то ценник совсем не православный, даже в Китае; тут весь агрегат дешевле стоит. Если будет хоть какая-то монетизация хобби (к чему совсем не стремлюсь), то можно будет и помажорить, а пока - поиски дешёвых и сердитых вариантов.

С одной стороны - лес, с другой - “море”; для посадки только пятачок “взлётки”
Были серьёзные опасения насчёт возврата домой (RTH или RTL) - во время тестовых вылетов мы его проверяли, работает, но обратно управление не восстанавливалось. Грешили на Валкеровский приёмник 1002; однако дело оказалось в авто-биндинге пульта (у меня пульт остался от моего первого съёмочного дрона, Вали-350, отсюда и такой приёмник); после установки FixedID в пульте управление стало возвращаться. Один раз почему-то управление стиками не восстановилось после потери связи; но переключение в режим AltHold помогло; а во время фото-вылета после “улёта” аппарата управление восстановилось без проблем.
Полётные качества оказались вполне на уровне - даже в сильный ветер и над лесом пролетал, и над заливом; однажды, судя по показаниям GPS, разогнал аппарат до 25 м/с (скорее всего, просто пёр по ветру); однако и против ветра аппаратик тащился вполне уверенно.
Одно “но” - батарейки 3s в 5500 mAh хватает минут на 10-12 полёта; проверяли в безветренную погоду, в ветер да в таких скукоженных условиях и того меньше, старался на 11В уже на посадку заходить, по 6-7 минут вылеты в итоге. Склоняюсь к мысли, что тяги 4х джидаевских моторов 2212*920kv маловато для аппарата “сухим” весом в 1400 + батарейка (ещё 450). Будем переделывать в складную гексу - а то эту птицу даже толком не потаскаешь, всё торчит в разные стороны:

Ещё грешу на карбон-пропы 10*36, хотя рекомендованы 10*45. Но, что у нас были из 1045, какие-то уж сильно дешманские, а тут солидно всё. 😃))
Ну, и в итоге - видео, отснятое в ходе 4 видео-вылетов за два дня - днём и вечером:
Многовато брака, но мне важно показать место, а не собственную крутизну. 😉 В субтитрах - пояснения, что происходит.
P.S. Разумеется, полёты были заранее согласованы с администрацией лагеря.
После статьи про самоделкиных немного раскрою тему съёмочных дронов - несмотря на их кажущуюся мега-популярность, огромное число обывателей понятия не имеет, что это такое и зачем. В основном пишу для новичков; можно было бы и в ЖЖ написать, но всё же техническая статья, лучше уж тут. 😃
Начать хочется с осознания, что съёмочный дрон - это, в общем-то, довольно специфическая конструкция, и не каждая жужжалка с 4 пропеллерами является таковой. Несмотря на кажущуюся простоту конструкции, дроны бывают сильно разными по назначению (как и автомобили); опишу тут основные классы *-коптеров:
- Съёмочные дроны; “летающие краны” - нужна максимальная стабильность полёта и видео-система для записи воздушного видео.
- Гонщики/акробаты; не всегда это одно и то же. Важна маневренность, управляемость и общая энерговооружённость.
- Долголёты. Максимальное полётное время и/или дальность управляемости.
- Тяжеловозы. Максимальная полезная нагрузка; довольно редкий класс.
Также есть масса узко-специализированных подклассов, но про них не будем. Важно понимать, что дрон, как правило, заточен под одну задачу, и если пытаться совместить их две и больше, то это радикально скажется на цене, а, скорее всего, и качестве выполнения этих задач.
Небольшое лирическое отступление - хотя квадро- и прочие мульти-коптеры (также популярны три-, гекса- и окта-коптеры) сейчас однозначно тренд и их популярность бьет все рекорды, это далеко не самый эффективный летательный агрегат. По долголётности и тяжеловозности намного эффективнее самолёты и вертолёты; акробатика и на тех и на других также местами эффектнее. Мульти-коптеры выделяются своей управляемостью; попасть в игольное ушко куда проще на *коптере, чем на самолёте или вертолёте. Также из-за этого они намного удобнее для видео-съёмки; поэтому имхо самое технически грамотное их применение - именно для видеосъёмки. Если надо поотрываться, полетать далеко и высоко - то, возможно, лучше обратиться к другим видам ЛА. Правда, они сложнее в управлении обслуживании; скорее всего, именно этим и объясняется популярность коптеров.
Вернёмся к съёмочным дронам; под словом “дрон” буду подразумевать именно *-коптер, потому как практически ни один другой вид ЛА для съёмок толком не подходит; конечно, есть аэрография и аэрофотосъёмка, но мы сегодня про любительскую видеосъёмку, поэтому - только коптеры.
Для начала следует сказать, что не стоит путать понятия “съёмочный дрон” и “дрон с камерой”; в последнее время продаваны толкают доверчивым обывателям всякую дичь под видом “камеро-дронов”. Степень технического невежества поражает, и кое-кто умудряется покупать дроны класса Мавика, не понимая, как оно работает; что уж говорить за людей, которые приходят в магазин с целой десяткой тыщ рупий и уверенных, что уж за такие деньги они должны точно купить полу-профессиональный девайс.
Дрон вообще штука не очень дешёвая. Да, есть целая россыпь китайских агрегатов за несколько тыщ вечнодеревянных, однако по большей части они не подпадают ни под какую категорию дронов вообще - так, летающая фанера, не более. Некоторые из них тащат на своём борту камеру; но на большинстве из них камера не способна ничего записать, она просто передаёт картинку на землю, где её ещё надо принять и показать. Купив такой “камеродрон”, вы можете получить только половинку от цельной системы - передатчик есть, приёмника нет.
Думаю, в самом начале не лишне будет заметить, что для съёмочного дрона обязателен GPS-модуль - снимать крайне желательно в режиме стабилизации по спутникам, чтобы дрон не сносило ветром; в целом снимать можно хоть в акро-режиме, только и качество будет страдать, и это доступно только профи; основная же фича “летающих кранов”, как ещё называют съёмочные дроны - в возможности зависнуть в произвольном месте и снимать оттуда. Чем стабильнее GPS-сигнал, тем надёжнее висит дрон, тем лучше стабилизация картинки, и тем приятнее смотреть итоговое видео - картинка с болтающегося на ветру агрегата не очень полезна для глаз. GPS-модуль также необходим для возврата домой в случае потери связи - но это уже так, совсем азы.
Ещё раз - если на дроне установлена камера, это совсем не значит, что вы имеете дело со съёмочным дроном; возможно, эта камера вообще не умеет записывать видео. Как это работает вообще. На дроне установлена камера, и она может служить как для передачи видео на землю (вам, как пилоту), так и для видео-записи; причём часто бывает, что она может либо то, либо другое. Камеры для передачи картинки на землю называются FPV-камерами (от first person view, взгляд “глазами дрона”), и вот они практически 100% не умеют записывать видео. Съёмочные камеры - которые записывают видео - не обязаны передавать картинку на землю; надо перепроверять. В случае дешёвых дронов вполне можно вляпаться и в fpv-камеру на дроне, и в записывающую, но не передающую камеру.
Для съёмок сигнал с камеры в общем-то не обязателен, но крайне желателен - если вы хотите не просто снимать, но ещё и потом смотреть собственное видео. 😃) Дрон без FPV-картинки - всё равно что фотоаппарат без видоискателя; снимаю наугад, с таким же результатом. Передаваемый сигнал всегда хуже, чем записываемый камерой, и его надо ещё на чём-то воспроизвести - запросто может получиться так, что вы вообще не будете видеть, что же там снимает дрон, из-за качества картинки и засветок ярким солнцем.
Но для съёмок всё же главнейший аспект - качество снимаемого видео. Это качество не определяется циферками в рекламных буклетах, а состоит из целой груды факторов, новичку непонятных, и на каждом можно наколоться.
Самое сложное при съёмке с дрона - добиться стабильности картинки. Из-за особенности полёта дронов картинка всегда будет “гулять”, иногда весьма сильно, и если камера просто жестко закреплена на аппарате (даже с применением демпферов), то итоговое видео будет как при видеосъёмке телефоном с рук на бегу. Даже если у вас стабильно летающий дрон, всё равно на картинку будет довольно сложно смотреть (пример); для “гуляющих” аппаратов не то что кому-топоказывать, самому смотреть итоговое видео будет сложновато; а дешёвые дроны “гуляют” почти все.
Поэтому для съёмочного дрона обязательно применение т.н. подвеса, стабилизирующего картинку; по-басурмански он называется gimbal, и он фактически копирует поведение стабилизирующего механизма дрона, только уже для подвешенной на нём камеры:

Когда дрон отклоняется назад, камера задирается вверх; но подвес компенсирует наклон, и камера продолжает “смотреть в горизонт”; также с наклонами влево-вправо. Для любительской съёмки этого достаточно; но если гоняться за качеством картинки, то практически обязателен 3-мерный подвес; со стабилизацией вращений дрона вокруг своей оси; но это уже другие деньги. Главное - отличать подвес от держателя камеры; иногда в описаниях встречаются упоминания о “подвесе”, когда там очевидно просто болтами всё прикручено, всегда надо уточнять, сколько осей стабилизации; должно быть минимум две. Держатель же, ясное дело, никакой стабилизации не даёт; может снизить тряску за счёт демпферов, не более.
В последнее время также появились дроны с программной (цифровой) стабилизацией изображения - таковы дроны Parrot Bebop, Breeze и кое-какие ещё. Надо сказать, что качество стабилизации картинки у них зачастую на уровне и даже выше, чем при использовании подвеса, но ценой существенного ухудшения итогового видео (я об этом писал в статье про Bebop2). Для любителей это в общем-то неплохой вариант - если смотреть видео где-нибудь на телефоне или планшете, то качество радует глаз и им можно даже впечатлить доверчивых зрителей; однако при развороте на полный экран компьютера всё встаёт на свои места - из-за постоянной обработки картинка сильно “мылится”, и по качеству соответствует не очень хорошей камере телефона. Но, повторюсь, для обывателей, которым не надо показывать ролики на большом экране, этого более чем достаточно. Однако и цена у таких аппаратов немалая - порядка $500, не считая доп. расходников - батареек, пропеллеров и тд.
Впрочем, и другие съёмочные дроны по цене примерно начинаются с того же ценового диапазона - поскольку для нормальной видеосъёмки с дрона нужен сам дрон, подвес, камера, пульт управления и экран для просмотра видео в полёте. Вышеупомянутые Bebop и Breeze (а также их более дешёвые аналоги) используют вместо пульта и экрана обычный смартфон/планшет, что существенно удешевляет процесс, но категорически сокращает радиус управляемости (и просмотра видео) дрона - точнее, ставят его в зависимости от вашего гаджета; с большинства девайсов удаётся управлять метров со 100-150; хотя некоторые планшеты и телефоны “добивают” на 400-500 метров, проверено лично. А вот дроны с аналоговым управлением (коих в дешёвом сегменте подавляющее большинство) требуют для управления пульт и FPV-экранчик, что сказывается на стоимости.
Надо сказать, что качественный “аналог” всё ещё лучше дешёвой “цифры”, и при применении качественной аппаратуры (даже любительского уровня) дроны летают высоко и далеко, куда достаёт только практически профессиональная “цифра” класса Lightbridge, и то не всякая. Другое дело, что дешёвые дроны зачастую комплектуются всяким хламом - и даже если сами они не так уж плохи, то в связке со “стоковым” пультом они могут терять связь в паре сотен метров - какая уж тут сьёмка.
Ещё более сложное дело - контроль видео с земли. В лучшем случае вы получите выдачу видео на телефон, который при ярком свете будет слепить так, что ничего не видно; попробуйте на собственном телефоне последить за деталями видео под солнцем; не в целом за видео, а именно за деталями, поскольку с воздуха картинка будет в стиле “палка-палка-огуречик”. Это в лучшем случае. В худшем у вас не будет ничего; а в основном пульты комплектуются чем-то, гордо называемым FPV-монитор, и в которые видно ещё гораздо хуже, чем в ваш телефон. Сам являюсь обладателем навороченного (для любителей) и дорогого пульта Devo12E, в котором вроде бы и есть монитор (подаваемый как мега-фича); а на деле его можно использовать только как индикатор наличия сигнала - даже шторки не помогают, ни черта не видно. А так как лучшие кадры всегда - в солнечную погоду, то имейте это в виду, что с этим что-то надо делать.
Для решения данной проблемы могу предложить FPV-шлем; сейчас китайцы наловчились их штамповать довольно дёшево, а качество картинки в шлеме по сравнению с пресловутыми “FPV-мониторами” и телефонами на порядок круче - не в плане общего качества, а из-за отсутствия засветок; вы в любую погоду видите то, что передаётся на землю. Сразу предупреждаю - шлем вещь громоздкая, и не очень удобная при длительной носке, а также он полностью блокирует обычное зрение, и вы не будете видеть, что происходит вокруг - например, бежать за дроном в нём точно не выйдет. 😃)) FPV-очки (goggles) менее громоздки, но их цена начинается от $250 за самые дешманские модели; шлем же можно взять за… $50 и даже меньше (ещё и с функцией превращения в монитор).
Также следует сказать про общее качество видео - оно не определяется единственным параметром разрешения, и частота кадров (fps) также не однозначно говорит о крутизне видео; да и битрейт (bitrate) также не показывает всю крутость картинки; хотя все эти параметры, безусловно, важны и нужны. С обывательской точки зрения достаточно снимать видео в условном FullHD, и этого достаточно; на практике же видео, снятое в одном и том же режиме разными камерами, может быть сильно разным по качеству. Поэтому не стоит зацикливаться на циферках, и смотреть независимые обзоры, а не рекламные ролики, при выборе агрегата для съёмок.
Даже если у вас хорошая камера, любую съёмку можно запороть при использовании… медленной флешки. Причём “медленной” вполне может оказаться довольно шустрая - для других задач - флешка; потому что тот самый упомянутый выше битрейт для снимаемого видео может оказаться выше её скорости; и камера просто не будет успевать записывать отснятое. Если вы снимаете в разрешении 320*200, то, конечно, вы выше этих проблем 😃); однако уже в обычном FullHD можно столкнуться с медленной работой флешки, особенно при 60 кадров в секунду (что сейчас уже практически норма даже для дешёвых экшн-камер). Чем выше битрейт, тем выше общее качество съёмки, и тем больше шансов превысить скорость флешки и запороть всю запись. Всегда проверяйте флешки в “боевых” условиях - от того, что они “нормально пишут” в телефоне или фотоаппарате, нет никаких гарантий, что они потянут качественное видео.
Что флешки - съёмку может запороть даже банальный не-отбалансированный пропеллер. Если одна лопасть больше другой, то при вращении возникает вибрация, иногда весьма существенно потряхивающая весь дрон. Если демпферы не справятся (а они такое и не “съедят”), то на видео будет тряска, а то и ощутимое “желе”. Программная стабилизация (на Bebop и аналогах) даст в таком случае мыло мыльное (каждый кадр надо будет смещать туда-сюда), что тоже не айс.
Батарейки на качество видео влияют слабо; однако от них сильно зависят полётные качества самого дрона. В среднем съёмочные дроны летают от 10 до 30 минут (для самых дорогих моделей); обычно 10-20, не больше; не всегда этого хватает, но надо понимать, что это вам не долголёт; основная задача - снимать видео занедорого. 😃)) У съёмочного дрона с батарейками связана основная опасность “забыл вернуться”; особенно это касается старых или некачественных батареек. В дронах используются те же литий-ионные батарейки, что и в смартфонах, и многим известен эффект “вот только было 20% и уже 1%”, так вот в случае дронов это может означать нехорошие последствия. При съёмке зачастую следишь не за полётом, а за кадром, и можно проворонить сообщения о разряде батареи; а иногда их и просто не показывают, следи сам за зарядом батареи. В сумме с эффектом “ой, уже 1%” следить надо не только за состоянием, но и за скоростью разряда батареи - что, разумеется, не всегда возможно. И вот тогда ваш мега-дрон может сесть или, чего доброго, просто свалиться кому-нибудь на голову; впрочем, это касается любых дронов, даже не *-коптеров; просто съёмочные дроны более всего располагают к невнимательности к собственно полёту.
В общем, дроны - это тоже авиация, пусть и маленькая и чахленькая. Когда всё настроено и отлажено, управлять ими сможет и ребёнок, но добиться этого не всегда просто. Банальная раскалибровка компаса может испортить всё впечатление и от съёмок, и от дрона; а таких деталей в дроне - уйма. В последнее время появились дроны (в основном - Фантомы и прочие продукты фирмы DJI), которые уверенно летят “из коробки”; однако если не понимать, как там что работает, то можно и с ними найти приключений на свою жОсткую железную броню.
Но, пожалуй, про авиационную безопасность лучше в следующий раз, дабы не перегружать и без того перегруженную статью.
В оконцовке следует заметить, что видеосъёмка с дрона - вещь затратная. Если для вас важно максимальное качество при минимальных усилиях - берите Фантом или Мавик; но это, прямо скажем, дороговато, и не гарантирует вас от падений и улётов (хотя тут надо постараться). Если же вам интересен ещё и полёт сам по себе - вот тут возможны варианты; но в любом случае за пять копеек вы даже самосбор не соберёте. Дёшево и сердито - это не про нас, увы.
Расскажу про опыт участия в построении самодельного съёмочного квадрокоптера; а также рассказ, как докатился до жизни такой.
Предыстория
Кому интересны технические детали, смело пропускаем до следующего пункта; а тут расскажу, как так вышло, что вместо конформистского Фантома летаем на самоделкиных.
Идеей съёмок с воздуха загорелся в самый неподходящий момент - в начале 2015-го года, когда с курсом рубля происходило всякое. Возможно, не было бы подобных приколов, летал бы, как все, на Фантоме, и в ус не дул - но по тем временам Фантом2 со съёмочными прибамбасами стоил каких-то совсем непростых денег - до 90 тыров за Ф2Вижен; плюс расходники к нему стоили также не очень православно. Поэтому выбор мой пал на конкурента - Walkera 350 Pro, с 3D-подвесом и камерой iLook+; а также самым жЫрным из Валкеровских пультов - Дево12Е. Это всё равно стоило дешевле, чем Ф2, особенно по расходникам; но Валя показала себя крайне нестабильной машинкой. К тому же героическая наша почта потеряла мой подвес (совсем, с концами); с тех пор всегда распаковку посылок делаю под видеосъёмку - иногда помогает. В общем, Валя-350 съёмочным дроном может считаться лишь условно - возможности вроде есть, а вот стабильности нет. Снял с неё несколько клипов (например), однако её стабильность в какой-то момент решительно довела, и с тех пор она лежит в режиме продажи.
Опыт Валкеры приучил не просто топить газ в пол, но разбираться, как аппарат летает и почему так себя ведёт. На почве ковыряния в проблемах Вали-350 познакомился с коллегой по хобби Фёдором, с которым и организовали вышеупомянутый колхоз - он электронщик; а я так, советчик. 😃)) Практически все технические доработки аппаратов делает Фёдор, я только в настройках помогаю, заказываю запчасти в инет-магазинах, да советую, как лучше сделать для съёмок - Фёдор больше по полётам, а мне нужно снимать. 😃)
Даже ещё до покупки Вали350 купил в обычном магазине DNS Фантом FC40 - вариацию Фантома1 с вайфай-камеркой - поучиться летать; стоил он тогда довольно дёшево, и отлетал на все деньги. В отличие от Вали, Фантик замечательно летал, но встроенная камера, конечно, не очень (пример); да и попытки приколхозить к нему подвес были слегка наивными (пример). В общем, на руках оказалось два дрона - один плохо летает и относительно неплохо снимает (Валя-350); другой хорошо летает, но плохо снимает (Фантик).
В какой-то момент решил обратиться к надёжным производителям и купил “походный” дрон Parrot Bebop2, о чём писал в своём блоге в ЖЖ. Аппарат неплохой (правда, в Россию попадает с приключениями), но - куда ж без но. По полётным характеристикам он превосходит все виденные мною дроны, но вот со съёмками у него тоже не ахти. В тёплое время года (выше +10-15С) он снимает относительно неплохо, но при 0 и ниже - начинается такое, что вообще не стыкуется с понятием “видеосъёмка” (пример). Снял с него несколько клипов (пример); но всё равно - качество съёмки как-то не соответствует дрону за $500 (плюс ещё столько же за пульт и всякие расходники). Ладно бы ещё с таким качеством снимал круглогодично - но у нас в Сибири он становится бесполезен каждые полгода.
Собственно именно после попыток колхоза над B2 пришло понимание, что надо либо покупать Фантом (це имхо конформизм и моветон), либо же попробовать сделать что-то своё. Коллега Фёдор всё время собирает разного рода летающие агрегаты, фактически из дерьма и палок; ну и мне посоветовал пересадить на бесхозную раму 550 масштаба мозги от Фантика, который недавно у меня упал в поездке на Алтай (что для Фантика вообще-то не характерно), и чем чинить относительно бесполезный аппарат, лучше сделать из него полезный. Чем и занялись.
Учим “Фантика” летать на новой раме
Есть такое поверие, что аппараты на Назе летают хорошо и почти не падают - однако же буквально с самого начала после пересадки мозгов и начинки Фантика-FC40 на другую раму тот начал вести себя неадекватно:
Разумеется, кроме мозгов, в дроне целая куча всякой мелочи, каждая из которой может влиять на стабильность полёта; вот мы и начали разбираться, чего не так. Заменили приёмник на родной, выставили правильные расходны (PID), и к лету аппарат как-то начал более-менее летать:
Это не значит, что мы полгода только этим и занимались - Фёдор собрал ещё как минимум парочку аппаратов, а я купил гоночную Валкеру-210, и мы всё лето в основном осваивали гоночные квадры:
Летом Попугай снимает более-менее нормально, так что процесс не ускоряли, потихоньку ковыряясь и дозаказывая различные детали в Китае. Но к осени моя гоночная Валя улетела в лес и не нашлась; а Попугай принялся снимать как обычно, так что пришлось возвращаться и ускорять постройку переделанного “Фантика”. И тут оказалось, что эта сволочь по-прежнему летать не хочет. Причём как-то очень хитро.
Ближе к зиме мы выяснили, что дрон летает нормально лишь… на одной батарейке - Zippy 2200mah жёлтой серии, а буквально все остальные вводят его в то же самое состояние, показанное в роликах выше. Сперва грешили на GPS-модуль; заказал на aliexpress другой, более качественный - замечательная штука, ловит 14-17 спутников к моменту, пока дрон заведётся - вот только на поведении это никак не отражается - на той же “жёлтой” батарейке летает хорошо, на других водка пей, земля валяйся. Причём, в отличие от той же Вали-350, которой башку сносит в произвольный момент времени, тут было сразу чётко видно - аппарат летит или собирается валяться; сразу после взлёта.
К тому моменту на дрон уже поставили OSD-модуль, подвес и камеру, и какое-то время грешили и на них; переставаляли OSD, видео-передатчики, поменяли приёмник на давным-давно заказанный Walkera-1002 (единственное, что осталось от Вали-350 в годном состоянии - это пульт, ну, и ещё батареечки) - без изменений.
К тому моменту Фёдор собрал складной коптер на 450-й раме на базе мозгов Naza-lite, который у него практически с ходу полетел, и тут мы начали что-то подозревать. Начали переставлять модули поочерёдно с одного аппарата на другой. Когда дошло до пересадки мозгов (я всё боялся, что ещё при падении на Алтае аппарат стряс мозги), то выяснилось, что всё по-отдельности на другом аппарате себя ведёт нормально; ещё даже лучше, чем “родные” запчасти.
И только когда остались не пересаженными только рама и ходовая (которая, напоминаю, ведёт себя нормально как минимум на одной батарейке), Фёдор вспомнил, что когда-то давно перепрошил регуляторы на другую частоту, с которой Наза не дружит. После замены регулей на первый попавшийся набор аппарат “внезапно” перестал кидаться на планету, и с тех пор летает нормально на любых батарейках.
Разумеется, “летать” <> “снимать”, поэтому возни ещё было немало, и ещё, скорее всего, предстоит. В качестве подвеса использую FeiyuTech mini-3d, который пришлось поднастроить, и он до сих пор безбожно валит горизонт при манёврах; но хотя бы потом выравнивается. Камеру использую Firefly 6s - довольно дешёвая китайская камера, но снимает вполне пристойно. Уже заказал ещё одну камеру - Xiaomi YI 4k, следующую версию известной YI, так героическая наша почта её потеряла, как и 3д-подвес от Валкеры годом ранее - надеюсь, найдут, хотя надёжи мало.
В качестве передатчика сперва использовали какие-то простые 200mW, затем 600 mw, а потом уже и вкорячили здоровенный 2-ваттный передатчик, который глушит рядом стоящие и летящие передатчики. 😃)) Зато сегодня улетели на нём на 2 километра, и это не предел - даже на одной антенне (у меня шлем Skyzone SJ-V01 с модулем Diversity, но одна антенна сломана, в ходе краша на шлем того же аппарата) картинка ещё позволяла лететь дальше; а скоро сделаем направленную антенну и поставим рядом:
Смотреть с субтитрами.
Экспериментируем сейчас с качеством видео - похоже, с этой камерой лучше всего снимать в FullHD, со включённой стабилизацией - она “сьедает” дрожание камеры на подвесе, которое определённо есть:
Так-то камера позволяет сымать хоть в 4K; картинка, конечно, детализированная выходит, только вот мелкое дребезжание достаёт:
Конечно, с Фантомом было бы проще. И даже, возможно, немного дешевле. 😃)) Зато опыта и понимания, как чего где работает, не было бы и в помине.
В планах - переделка этой конструкции в… складную гексу, так что покой нам только снится. Но пока что есть ещё один проект, который надо будет реализовать в таком виде агрегата. Возможно, будет что показать через пару недель.

Небольшие тесты “утепления” батареек для зимних полётов. В прошлые выходные было -20 (правда, без ветра), и батарейки коптеров моментально замерзали, а сегодня “всего лишь” -10 с ветерком, и такая белиберда ожидается минимум в ближние 3 месяца, так что к полётам надо быть готовым в любую погоду.
Я с весны летаю на колхозных батарейках, их оказалось утеплить проще простого, примитивным образом - обычной упаковочной плёнкой, в которой приходят товары из китайских инет-магазинов, причём не особо-то и старался полностью закутать батарейку; реально за 5 минут тяп-ляп:

Наверняка можно придумать что-то более эффективное и при этом лёгкое, но и так результат превзошёл все ожидания - прибавка в полётном времени вдвое!

Все остальные декабрьские полёты - без утепления; от 5:30 до 7 минут полётного времени - с утеплённой батарейкой аппарат налетал почти 13 минут! К сожалению, все замёрзли, особенно мой планшет 😃)) и пришлось сворачиваться, а так с собой были ещё парочка утеплённых батареек, можно было затестить более точно.
Что немаловажно - утеплённая батарейка просаживается равномерно, без скачков:

Не-утеплённая батарейка сегодня просела тоже более-менее равномерно:

Но тут тоже раз на раз не приходится - вот поведение батареек в прошлые выходные, в -20:

Полное фото
Также затестили самоделку на утеплённых батареях - она показала 7 минут полётного времени на батарее 3s 2200mAh - от Фантома-1, аналогичной моим “попугайским”:
Как видно, аппарат несколько побольше Бибопа. Запись камерой Runcam2
И в конце ещё один тест - уже не совсем батареечный, но немного с ними связанный. В ходе как раз тестового “утеплённого” вылета Попугая планшет Nexus7 не вынес сибирских морозов и попросту выключился; хорошо, что управление шло через СК и жЫвотные не пострадали. Тем не менее, для контроля вёл запись экрана программой AZ Screen Recorder, и в ходе отключения планшета файл побился. Удалось восстановить его с помощью Video Repair Utility (v 1.9.0.0) - хотя и заметно, что там не всё так однозначно (с). Но можно посмотреть, с какой скоростью тает батареечка.
ЗЫ: всё-таки физические кнопки рулят, в мороз (даже такой как -10) голыми руками рулить крайне тяжко, а с СК и прочих пультов рулить можно и в перчатках.
Апдейт: утепление почти ничего не весит: вот для примера сравнение утеплённой и не-утеплённой батарейки для очков - разница в 1 грамм:


Это не батарейка от Б2, но примерно порядок понятен, надеюсь.
Сегодня был большой полётный день после большого перерыва - то погода не позволяла летать, то техника; в общем, впервые за зиму выбрались на обычную зимнюю поляну - Обское море. Летом тут летать нельзя - вода и люди кругом; а зимой в самый раз.
Сперва затестили Bebop2. Аппарат ещё с весны известен тем, что в минус снимает очень не очень; с тех пор уже успели наколхозить на нём систему обогрева и спалить при этом камеру; вторая ничем не лучше, в минус снимает так же плохо. Сегодняшние полёты:
Данный тест был предсказуем и ничем не удивителен.
Следующий тест - проверка записи экрана на телефоне, одновременно с управлением; эдакая замена DVR для Попугая. Тестировали на программе Telecine - есть у неё косячок, она не пишет звук, но в нашем случае это и не надо:
Врезки без телеметрии - видео, снятое дроном.
Так как на дворе сильный минус и с телефона управлять сложновато, летали с управлением через Скайконтроллер; поэтому телефон не использовался для управления, только для FPV и телеметрии. Телефон - Vernee Thor; запись видео ему никак не мешает; правда, за полётный час сел до нуля - ведь всё время находился в СК на морозе; так что, скорее всего, на батарею это влияет и очень даже.
Следующий тест - батарейки. Летаем на “колхозных” батареях в 2200 махов (родные - 2700); летом на них дрон летает 16-18 минут, а при таком морозе - 7 минут плюс-минус полминуты, причём скорее минус. Утепления не применяли; потом ещё затестим батарейки в теплоизоляции; должно немного помочь, сейчас-то железный корпус моментально мёрзнет.
В конце полётов кое-кто наступил на ногу Попугаю и немного поломал проп - при этом он продолжил летать как летал, только жужжал чуть более злобно и на видео попёрло желе, а на стабильности и длительности полётов это не отразилось:

Полное фото - тут.
Параллельно с Попугаем проверяли основной в будущем съёмочный дрон - самоделка на базе Фантома FC40. Правда, от Фантома тут не осталось уже ничего, кроме контроллера - и приёмник заменили на валкеровский 1002, и GPS-модуль заменили на вот такой. Кстати, о GPS-модуле - с весны пытались научить “Фантика” летать на другой раме, но он постоянно шизел и падал. Стоило заменить его, как проблемы ушли и летает как прибитый:
Подруливание вызвано путаницей каналов - на правом стике перепутаны каналы управления вперёд-назад и влево-вправо. К сожалению, долго ковырялись перед запуском и батарейка успела замёрзнуть - сразу после взлёта начала мигать лампочка и пришлось садиться; хотя напруга после посадки осталась 11.8В. Камера SJ4000 тоже замёрзла и перестала включаться - хотя -20 это не такой уж и мороз.
Съёмка, увы, не очень - на ярком солнце дисплейчик FireFly6s нифига не виден, и выставил режим какой попало; лучше бы и не трогал. Зато вот ей мороз нипочём - отснял несколько роликов, и батарейка не села.
И последний тест - новая самоделка, складной дрон, убер-Мавик 😃)) - который пока летает не очень, по причине применения всё того же GPS-модуля от FC40 - результаты на видео:
В отличие от “фантика” этот складывается и занимает относительно немного места. Но пока что на нём ни подвеса, ни OSD, ни видео-передатчика - всё в будущем будет. Мозги у аппарата - Наза-лайт, приёмник от Fc40 (5,8Ггц). Когда-нибудь и этот полетит. 😉
Окончание полётов - Андрей пилотирует Попугая, Фёдор прячет убер-Мавика; “Фантик” валяется сам по себе:

Съёмка падения “мавика” с Попугая - тут; но он уже окончательно замёрз и с поломанным пропом, так что вообще ничего не видать.
Трагическая и поучительная история про мальчика Бобби о том, как я уронил своего Попугая (Parrot Bebop2). Для некоторых агрегатов состояние “мордой в грязь” вполне обыденно, но за полгода довольно активной эксплуатации такое у меня первый раз, и по весьма не-банальной причине; так что должно быть интересно многим, не только дроноводам.
Поехали мы с коллегой по хобби Фёдором выполнять первый наш практически коммерческий заказ - “практически” потому, что обещали за съёмку денежку дать, а сколько - даже и не спрашивали. 😃) Мы ж энтузиасты, нам самим интересно, а денежка - дело второе. Хотя и нужное.
План полёта заранее уже был определён, и надо было стартовать от “Гусей”, в некотором плане знакового места нашего Академа - центрального здания местного Технопарка. Надо было снять окрестности “Гусей” и лететь дальше; но не всё пошло по плану.
Я всегда стараюсь летать за городом, и к городскому уровню помех не привычен - а тут сигнал принялся пропадать буквально в паре сотен метров. Хотя недавно на Алтае улетали на 1700м… Проблема не только в том, что много помех, но и в том, что Гуси - здание очень высокое, и, чтобы не подлетать к нему и не попадать под самый шквал излучений, держался как можно выше - даже “пробил” стандартный Geofence (виртуальный забор) дрона, и впервые поднялся выше 150м - с обновлением программы управления до FreeFlight Pro это стало возможным.
В общем, первый заход на цель оказался неудачным - не включил камеру, сигнал потерялся, дрон вернулся в точку взлёта по RTH - почему-то связь не восстанавливалась, даже если направишь антенну пульта прямо на дрон. Батарейка подсела ниже 50%, но это ещё вполне нормально - надо было быстренько туда-сюда пролететь и уже садиться. Включил запись и пошёл на второй заход, и тут собстно всё и началось.
В прошлый раз я держался сильно далеко от дрона (и от дороги), а на втором заходе пошёл прямо над дорогой, и дрона принялось сильно сносить ветром. После вылетов на Алтае местный ветерок не был помехой, но тут случился форс-мажор.
“Операторы”, которые следили за полётом, заметили, что дрон начал падать; пульт начал ругаться, что Critical battery alert; заряд батарейки резко скакнул до 0%. У меня сразу появилась мысль, что отпаялся один из контактов батарейки - летаю на перепаянных батарейках, и теоретически могло там что-то отпаяться. Однако сигнал камеры-то оставался! В FPV-шлеме я видел, что аппарат быстро снижается, но при этом не падает кирпичом, а его сносит ветром, но он типа планирует. Потом появилась мысль, что сдохла одна из банок - но тоже, почему мозги-то работают?.. Это тебе не аналоговый передатчик, тут замудрённая система, которая на 10.5В отключается напрочь.
Успел заметить, куда сносит аппарат, и тут где-то на 50м высоты картинка окончательно пропала. “Операторы” заметили примерное место падения, и мы рванули туда. Честно говоря, после падения с 50 метров казалось, что будем соскребать останки веничком, поэтому особо и не торопились.
После недолгих блужданий нашли аппарат за забором, окружённом колючей проволокой - причём не абы как, а по-военному. Оказалось - для меня только сейчас - что напротив “Гусей” в здании находится не только Институт Филологии, как я всю жизнь считал, но и… местный филиал ФСБ. И наш “Попугай” свалился как раз к ним во дворик. 😃))
Птичка выглядела понурой, но в общем более-менее целой, и стояла на лапах, что внушало оптимизм. Но - на бетонных плитах.
Энцать минут нам аппарат не отдавали, но в конце концов нашли ответственных и всё-таки пустили нас на стоянку. Аппарат был мало того, что почти не повреждён, так ещё и в сознании - мигал огоньком при переворотах. Из видимых повреждений - только посадочные “ноги” с правой стороны, да отлетевшая с передней “лапы” антенна - она вроде как тоже в порядке.
ФСБшники сурово на нас посмотрели, но даже проверять аппарат не стали - видимо, сыграло то, что мы не разбегались от них, а слонялись всей толпой, вчетвером, и не шифровались. Вопрос “зачем вы нас снимаете” была задан несколько раз; однако само здание находится буквально через дорогу от “Гусей”, где есть обзорная площадка, откуда оно прекрасно видно почти с той же самой высоты.
После освобождения Попугая поменяли батарейку - картинка идёт, моторы заводятся, всё окей. Померили “севшую” батарею - 11.4В, по 3.8 на банке - всё штатно.
Видимо, всё-таки у ФСБшников на крыше какие-то передатчики стоят, которые заглушили сигнал управления на Попугае, вот он и рехнулся. В первом вылете было слишком далеко, а когда пролетал близко, такая ботва и приключилась.
И напоследок - телеметрия.

По высоте там метров на 20 ошибка; даже до 160 не залазил вроде, но выше 150 был. Остальное можно оценить - с какой скоростью “падал”, что с батареей и всё такое.
И что удивительно - No Crash. Суровые французские птицы. 😆
Кабы знать заранее, что там ФСБ, не летал бы рядом. 😃) Но увы, про такое даже ДубльГИС не знает, на практике только прочувствовать можно.
Попугая, надеюсь, склеим, и снова полетим - но уже по другому полётному плану, нафиг-нафиг. 😉
Продолжу тему дрона Bebop2, после описания колхозов над ним. 😉 Вернулся с Алтая (описание поездки здесь); в ходе поездки несколько раз устраивал съёмочные вылеты, с разнонаправленным результатом, о чём сейчас и доложусь.
Пока находился в поездке, в весьма стеснённых условиях, отношение к дрону было заоблачным - ни разу не подвёл, всё было супер; половину своих вылетов на других дронах не решился бы сделать (см. видео ниже); качество отснятого видео на гаджете и даже ноутбуке выглядело отличным. Но по приезду домой и просмотре материала на 2.5K-мониторе заметил, что по качеству, конечно, практически любая более-менее современная экшн-камера лучше чуть ли не в разы. А так как Б2 - это всё же летающая камера, то всё это очень портит общее впечатление. Об этом - впечатлениях - и расскажу.
Главная фича Бибопов - в компактности. Собственно ради этого я и покупал Б2 - чтобы можно было без особых заморочек брать в поездки; там, где тяжело брать с собой большие рюкзаки от квадров 350-го формата, рюкзачок с Б2 и планшетиком для управления, в разы меньший, легко проходит. Но для серьёзных съёмок этого недостаточно, поэтому в поездку брал и СК (пульт от Бибопов) и даже HDMI-шлем Skyzone V01; сочетание вполне удачное, но к компактности не имеющая никакого отношения; пульт и шлем полностью занимают рюкзак от Фантома (я в таком таскал свою Валю-350 с немалым пультом Devo12E); так что “Попугайчик” в этой поездке переплюнул по сложности транспортировки любой Фантом. 😉
В принципе, с планшета управлять дроном можно - управляется до 500+м, даже камерой подруливать можно; я так и собирался сделать в поездке на Мультинские озёра, но в итоге удалось уболтать народ, чтобы помогли донести рюкзак с дроном, а сам корячился с пультом. В итоге в этой поездке планшетом практически не пользовался, да и телефоном в плане управления тоже почти нет - разве что для “слива” видео с дрона.
В отличие от многих дроноводов, у меня воздушные съёмки - далеко не главное хобби, и, что ещё более важно - в поездках времени на них практически нет; летаю в редкие свободные минутки, когда не надо никуда нестись. Поэтому крайне важна скорость подготовки дрона в вылету. В этом плане у Б2 всё в порядке - был бы ещё рюкзачок, в который он с пропами влазит, было бы вообще шикарно. А так приходилось крутить пропы перед каждым вылетом - быстро, но лишние 2-3 минуты отъедает, и это зачастую мешает.
В этом плане заценил конструкцию с СК и шлемом. Несмотря на то, что планшет вроде как “надо только включить”, в случае с Nexus7 и его 6-м ведроидом подготовка девайса к полёту занимает уйму времени - он не зацепляется к сетям без интернета автоматически, и надо каждый раз тыркаться в вайфай, подключаться к СК, затем разрешать использование сети, затем запускать FF, и везде дожидаться реакции девайса. Громоздкая конструкция пульт+шлем в этом плане срабатывала куда быстрее - пока кручу пропы, включаю пульт (он заводится минуты 2-3), потом прокидываю проводок с пульта, включаю шлем и переключаю видеовыход на HDMI - всё, пошла картинка, ничего нигде выбирать и ждать не надо. Гаджеты для полётов оказываются не нужны вовсе; однако позже ещё вернусь к этой теме.
Летать по шлему намного удобнее, чем по пульту - нет засветов, вся картина перед глазами. Использование СК позволяет одновременно рулить и дроном и его камерой, что позволяет выполнять почти профессиональные съёмки - если не брать в расчёт общее качество картинки. Единственный недостаток - не видишь, что происходит “снаружи” - если “потерять” направление на дрон, то можно потерять сигнал; в случае с Б2 это, конечно, не смертельно, дрон вернётся в точку вылета, но иногда неприятно.
Например, в ходе поездки решили поснимать поездку на машинке по относительно горной дорожке - взлетели, загрузились и поехали, а дрон полетел рядом. Я ещё не сразу даже сообразил развернуться, чтобы смотреть хотя бы нужном в направлении - но на 200-300 метров сигнал из машины пробивал; лишь однажды выскочило предупреждение, что сигнал слабеет, и то при подъёме Б2 на высоту, где уже вмешивался экран крыши. Причём в случае потери непонятно, куда бы аппарат направился и где его потом было бы искать; с такими экспериментами надо быть осторожным.
Как раз в ходе этого вылета обнаружил, что скорость аппарата была “зарезана” в ходе недавнего обновления версии программы до FF Pro (не мог угнаться за неспешной Деликой), и поставил все скорости по максимуму; в том числе вертикальную. Вот при вертикальных манёврах дрон ощутимо трясётся, и с этим не очень понятно, что делать - поэтому на большинстве моих видосов с Алтае при отлётах и подъёмах ввысь лезет премерзкое желе. А вот при горизонтальных пролётах и особенно панорамах желе практически незаметно; то ли какие-то PID сбились, то ли я уже и не знаю.
В ходе вылетов на Мультинских озёрах обнаружил, что аппарат легко переносит ветер, особенно фронтальный и тыловой - боковой не рекомендуется для съёмок из-за особенностей цифровой стабилизации; прут “лесенки”. В ходе вылета над Нижним Мультинским не сразу сообразил, что аппарат прёт против ветра, и начал возвращаться с запасом, чтобы хватило на борьбу с ветром - а назад-то его понесло гораздо быстрее.
В ветер летать, конечно, неприятно - не столько из-за боязни за аппарат (ему реально всё равно), сколько из-за всё тех же особенностей цифровой стабилизации - при порывах в кадр лезут края кадра. Лесенки, края, желе - в общем, Б2 всё же создан для идеальных условий съёмок, хотя летать может где угодно.
Кстати, в ходе вылета с “шумов” между двумя Мультинскими озёрами обнаружил, что один из пропов не закреплён совсем; либо пропустил его в спешке, либо он раскрутился при остановке, что более чем вряд ли - усилие там существенное. Видимо, за счёт этого усилия он и не отвалился.
Ещё один косяк - так как летал без гаджетов, то не калибровал компас аппарата в ходе выезда на Алтай. На видео-съёмке это не отразилось, а вот на фоточках видно заваленный горизонт:

При взлёте иногда аппарат гулял по сторонам - возможно, то же самое влияние кривой калибровки компаса, однако никаких сообщений не выдавалось, и после набора высоты всё приходило в норму. Сигнал GPS на дроне был всегда “зелёный”, это СК иногда не дожидался и взлетал при “жёлтом” сигнале - но это, как я понимаю, при статичном его положении без разницы - возможно, в случае перемещении пульта дрон будет ворочаться не в точку взлёта, а к пульту, но это пока не проверял; надо будет занятцо.
Тут взлетал с крылечка домика на пятачке - всё было нормально.
А вот тут дрон ломанулся от меня в лес сразу после взлёта - хорошо, успел “поймать” и вернуть в стойло - потом никуда не уходил. Зелёного GPS дождался.
На этом видео слегка переживал, когда опускал дрона ниже уровня взлёта - в шлеме корректно отображалась отрицательная высота; где-то на -40 опускался, судя по приборам.
А вот на этом видео сразу три урока. Первый - аппарат управляется на дальности до 1700м (см. первое видео). Второй - не все батарейки одинаково полезны; перед самым взлётом поменял проверенную батарейку, но с перепаянными самолично контактами (как-то уронил по причине плохой пайки своего Фантома-FC40) на чуть менее проверенную, и в результате чуть не утопил аппарат - заряд принялся пикировать с 30% как-то нездорово быстро, еле успел вернуть; сел на 6%.
Третий урок - несмотря на кажущуюся игрушечность, Bebop2 вполне можно использовать для почти профессиональных съёмок (если бы не чёртово качество видео) - на нём распараллеливается работа пилота и оператора; либо, в моём случае, штурмана. 😉 Подключение шлема по HDMI не блокирует подключение к СК гаджетов по Wifi. Подключение проходит в режим обзора, но это не мешает управлять камерой и делать фоточки. Более того - при использовании планшета (диагональ хотя бы 7") становится возможно… рулить экспозицией. С пульта нельзя, при управлении дроном не получается - а вот с планшета через СК - можно. Честно говоря, я не проверял, но шкалу экспозиции наблюдал - у меня были не столько операторы, сколько штурманы, которые подсказывали, куда лететь и сколько там чего осталось до буль-буль. 😉
В “поездочном” варианте у Б2 есть ещё одно немаловажное преимущество перед “взрослыми” девайсами - у него мини-батарейки, которые заряжаются довольно быстро, в том числе от бортовой сети авто. У меня с собой был блок питания с двойным питанием - от 220В и от авто; и зарядник iMax B6 - на ходу машины он заряжал 3s-липошки током 3А, а на стоянке приходилось уменьшать ток; 1А выдавалось стабильно. А так как у нас на базе ещё и свет давали только вечером на несколько часов, то зарядка батарей становилась задачей не из простых. Батареечка на 2200, на которых я летаю, заряжается по полчаса, так что Попугайку зарядить куда как проще, чем “взрослые” агрегаты.
Конечно, аппарат далеко не идеален. Хотелось бы как минимум возможность втыкать внешнюю флешку (8Гб для “нового” битрейта в 30Мбит - на два вылета), и также хотя бы горизонтальную физическую стабилизацию камеры, супротив лесенок. Но всё это пока что мечты.
Шлем Skyzone V01 для Попугая слегка избыточен - и громоздкий, и требует редкого Micro-HDMI-кабеля; но в использовании, конечно, хорош - всё видно и качество неплохое.
СК для поездок также громадина ещё та. Сейчас вышел набор Б2+СК2+очки для него, точнее набор для смартфона; пожалуй, это поинтереснее будет, и существенно покомпактнее. Однако колхозы - наше всё. 😉 Ждём Б3 с улучшенной камерой уже.
Продолжу тему описания полёты на “гонщике” Walkera F210, начатую статьёй про настройки.
Начну с главного опыта практических полётов - не всё йогурты одинаково полезны, в смысле аппарат, хоть и поставляется “из коробки”, может вам достаться в разной комплектации, и от этого будут зависеть ваши полёты.
Я давно присматривался к этому аппарату, и когда наконец решился, выбирал между магазинами Banggood и Gearbest - на жЫрбесте оказалось дешевле, взял там. И в итоге накололся - аппарат пришёл во-первых, без модуля OSD, а во-вторых, с передатчиком 5824, мощностью в 25 мВт, которого хватает метров на 100 дальности. Не знаю, что там продают в других местах, но на эти вещи советую обратить внимание - “нормальный” передатчик для 210-ки это 5825, он стоит 20 зелёных - и лучше брать аппарат сразу нормальный, чтобы не париться и не разбирать его для замены передатчика.
Аппарат действительно летит практически из коробки (хотя желательно предварительно настроить его согласно предыдущей статье), и требует вмешательства только после каких-то серьёзных падений; либо после попыток перепрошивки 😃 - хотя есть метод лечения, но не советую прошивать аппарат низачем нипочему, можете остаться с кирпичом. Летает аппарат очень хорошо, но новичку с ним совладать крайне сложно, так что готовьтесь к падениям, даже несмотря на идеальные лётные качества агрегата.
Иногда у моего аппарата происходит отвал башки и от начинает себя вести неадекватно. Обнаружил следующие неадекватности - проявляются редко, но могут привести к печальному:
- Аппарат уносит назад при ровном положении аппарата. Обычно проявляется сразу после взлёта, то есть надо посадить-рестартовать, и всё наладится. Но сегодня случилось и посреди полёта. Даже наклон аппарата вперёд по сути не спасает - аппарат как будто опрокидывает назад.
- Иногда в полёте как будто отказывает управление - поворачиваешь-наклоняешь аппарат, а он продолжает висеть как было. Возможно, это какой-то глюк OSD, либо помехи от соседней ЛЭП - стоит вернуть аппарат ближе к точке взлёта, и проблемы исчезают; правда, может проявиться (1).
Насчёт (1) - возможно, виновата центровка аппарата; креплю батарею ближе к задней части корпуса; когда закрепил на “лоб” аппарата камеру, проблема ни разу не возникла за несколько полётов. Но также грешу на кривость работы гироскопов - обычно проблема появляется одновременно с “зависанием” OSD - аппарат ощутимо колбасит, а горизонт не изменяется.
(2) Возможно, проблема вообще не в аппарате, а в шлеме - иногда он подвисает. Или в OSD. Или в ЛЭП. Буду разбираться.
В остальном же недостаток у аппарат ровно один - он слишком бешеный. 😃) После Вали смотреть на полёты фантомо-подобных летающих камер без слёз нельзя; но и навыков управления она требует на несколько порядков больше, и это не просто слова.
Несмотря на 210-й размер и массу в 500 грамм, аппарат очень быстрый и резвый, при любом шевеление стиков даже в режиме “стабилизации” (Angle) тут же срывается в пампасы и его иногда сложно становится “поймать” - непонятно, где перед, где зад. Лично мне много проще летать по FPV - в шлеме - чем пытаться его усмирить с видом со стороны; но это уж кому как.
Дальность FPV-сигнала с передатчиком 5824 - метров 100-150 (на 150 уже сплошной снег), с передатчиком 5825 - 200-300+, поляна не позволяет улететь дальше, позже измерю точнее; соответственно и теряется сигнал с 25-м передатчиком много ровнее - на 24 раз и всё, уже всё темно, а на 25 даже при сильных помехах можно пролететь не один десяток метров туда-сюда - что весьма критично при скорости 210-ки.
В качестве приёмника использовал и пульт Devo12E (с антенной от Aomway), и шлемы Skyzone V01 и Eachine EV800 - дальность приёма у всех примерно одинаковая, а вот качество картинки даже и сравнивать не надо; в обоих шлемах видно на сто порядков лучше, чем на пульте; хотя про это и в прошлый раз было. Для полёта на таком аппарате очки/шлем практически необходимы, потому что любой засвет или блик может привести к потере аппарата (а то и к жертвам среди гражданского населения) - это на Фантоме можно лениво посматривать в экран одним глазком, а тут не расслабишься.
По качеству картинки в шлемах - отдельная флеймовая тема, меня устраивает и картинка с дешёвого Eachine и со своего Skyzone, что втрое дороже; кто-то ругается на пикселизацию, а по мне так это какая-то дурь и попытка обмануть собственные глаза; уж если мы смотрим на картинку, то давайте на неё смотреть целиком, а не превращать её в замочную скважину. Камера у Вали неплохая, с возможностью ночной сьёмки - надо будет ещё затестить; однако можно и лучше, у коллеги подсмотрел картинку с какой-то другой камеры - чисто телевизор смотришь, против старого кино с 210-ки. Но в целом всё видно, должно вполне хватать для всяких трюков - уже научился пролетать под наклонённым деревом. 😃))
По общему качеству комплектующих аппарата по итогам 20+ отлётанных аккумов и нескольких серьёзных крашей (падений с высоты ~20м и втыканий в землю на максимальной скорости) - нареканий, как ни странно, практически нет. В первый же полётный день была надломлена видео-антенна, но продолжала работать и была заменена просто так, чтобы не бесила внешним видом. 😃 Из серьёзного - сгорел один из регулей, причём не в результате краша, а как-то сам по себе. В ходе контакта с питерским филиалом Валкеры получил нужный регуль за один день (!) - повезло с “курьером”, друг оказался в Питере в нужное время. 😃)) Там же и OSD приобрёл.
В остальном, как и говорил в прошлый раз - аппарат фантастически крепок. Сегодня опять случился “улёт назад”, Валя ушла в деревья с каким-то адским скрежетом, и после её обнаружения где-то в лесу обнаружилось, что поломан один проп - и то, надо сказать, не повезло, обычно эти пропы держат всё, кроме прямого падения на себя. Лучи, моторы, камера, передатчик, мозги - всё переживает любое безумие освоение аппарата с нуля. За всё время, кроме добавления OSD и замены передатчика на более мощный, из-за поломок заменил регуль, антенну (можно было не менять), заднюю крышку батарейного отсека (напечатали на принтере 😃), одну из “ножек” аппарата (тоже можно было не менять), и два (!) пропа. А падений при этом было чуть больше, чем вылетов, из них несколько вполне серьёзных.
Для полётов на Вале-210 нужен навык регулярных полётов, а я летаю крайне редко - перед этими выходными, например, был месячный перерыв в полётах, по разным причинам. Поэтому и скилл пока что невысок, несмотря на то, что аппарат у меня чуть ли не раньше всех в стране появился - с апреля его разбиваю. До сих пор опасаюсь учиться летать в акро-моде (Horizon) - только вроде научусь гонять, как аппарат опять что-то выкинет, и снова страшно. 😃))
В конце прилагаю видео, снятое с 210 с помощью камеры Runcam2, закреплённой “штатным” крепежом - это, конечно, не видео с Фантома, но показывает полёты Вали наяву. Это я осторожно летаю, боюсь упасть и камеру разбить - обычно чуть агрессивно гоняю.
Скорость видео - всего 30fps, забыл поставить 60, увы.

Полноформатное фото - тут.
Камера полётам Вали практически не мешает - по крайней мере, в не-акробатическом режиме. Позже ещё поснимаю с неё видео в 60fps, но про это уже в следующих сериях.
Являюсь обладателям дрончика Parrot Bebop2 (в просторечии Попугай), но попался мне бракованный аппарат, и в ходе вмешательства в его конструкцию окончательно угробили штатный объектив, пришлось заказывать новый - от GoPro. Практика показала, что замена не равнозначна, и снимает с новым объективом аппарат откровенно плохо. Тем более, в ходе замены напылили на матрицу, что будет отображено на видео ниже. Это, надеюсь, удастся победить продувкой - матрица тут почему-то не закрыта стеклом, и кисточками туда лезть не стоит.
Корпус объектива пришлось печатать на 3D-принтере, получилось имхо неплохо.

Переделанный Попугай в полях
Кроме переделки объектива, как нетрудно заметить, заменили штатную батарейку на стандартные липошки разъёма XT60; правда, штатный разъём снять пока не удалось, там он как-то хитро припаян, так что в принципе можно использовать и так и так. 😃 В “наморднике” придётся сделать небольшой вырез, но он и так чуть ли не картонный, не жалко.
Тесты батареек показали, что на не-родных батареях оно летает порядка 20 минут; тестили три разных батарейки:
- “синяя”, 2800 mAh какой-то нонейм.
- “маленькая железная”, ZOP 2200 mAh, 25C
- “чёрная”, BlackMagic 3000 mAh, 25C

Все батарейки показали себя неплохо, что позволяет сказать, что аппарат летает на не-родных батарейках почти так же, как и на родных - при кратной разнице в цене и существенно меньшем геморе с зарядкой.
Более конкретно:
- “Синяя батарейка”, какой-то лютый нонейм - отлетала три вылета, суммарно ~19 минут, при этом села до 15%, и аппарат принялось сильно колбасить на низком заряде батареи; при посадке выяснилось, что банки сильно разбалансены, и нижняя просела до 3.3В.
- “Маленькая железная”, Zop-2200, имхо лучшая из испытанных - несмотря на мелкий объём, в первом вылете почти на 10 минут села менее чем на 50%; потом ещё минут 8 её гоняли, села до 8%, и практически без дисбаланса банок.
- Чёрная Blackmagic 3000 - самая старая из моих батареек, ей больше 2 лет, и тем не менее отлетала 13:30 с просадкой до 38%, дальше аппарат в грязь шлёпнулся (мой косяк) и продолжать полёты не стали.
Раз уж пошла такая пьянка, перепаял разъём и на Скайконтроллере; у меня СК от первого Бибопа, и к нему батарейки от него же идут, а зарядки-то и нету; приходилось геморроиться с переходником. Батареечки формата 2200-2800 встают в гнездо штатной батарейки хорошо, только надо фиксировать липучкой, чтобы не выпадали:

В ходе одного из запусков отстрелился винт - при предыдущей посадке зацепился за край фанерки и разболтался:
ЗЫ: обращаю внимание, что силовые провода нужно либо относить подальше от морды аппарата, где расположен GPS, либо перекручивать, дабы они не давали наводок; когда не обращали на это внимания, аппарат ловил спутники больше минуты, против обычных нескольких секунд; и ведь это на земле, по сути без нагрузки на батарею.
Дома также проверил работу HDMI-порта на СК - работает, Parrot даже рекомендует его использовать для контроля работы СК при перепрошивке:

Тут плохо видно, но изображение с камеры - на мониторе компутера 😃
Почему-то монитор не захотел переключать выходы, пришлось перетыкать провода с компутера; всё видно хорошо, с поправкой на качество картинки.
А вот главный наш колхоз, замена объектива, пока что не сработал - картинка, конечно, аховая. Пыли насыпалось на матрицу, похоже - караул; а также нестандартный объектив постоянно корёжит картинку, стабилизация не справляется порой - в общем, будем думать дальше. В статике ещё как-то более-менее картинка бывает нормальная, а в движении - туши свет. Возможно, вернёмся к оригинальному объективу.
Апдейт: после первой чистки матрицы аппарат начал снимать вот так:
“Я не ракетчик, я филолог”, поэтому даже про технику пишу в художественном смысле. Попробую в этой статье описать первоначальные настройки дрона Walkera F210 - гоночного малыша; это не обзор, как-нибудь потом опишу агрегат, как пойму, как им управлять. 😆 Здесь - совсем краткое описание и первоначальные настройки перед первым полётом. Как ни странно, по дрону практически нет информации в инете, и даже в инструкции часть вопросов не раскрыта - поэтому и пишу статью.
Полноформатная фоточка - тут.
Кратенькое описание
Спецификации дрона можно глянуть на сайте Валкеры.
Я же говорил, что я не ракетчик - поэтому кратенько опишу дрона, не совсем техническим языком. Кому не надо, может пропустить до следующего пункта.
Дроны мне нужны для съёмок, и ранее летал только на дронах с GPS, преимущественно в GPS режимах, в которых всегда можно включить режим блондинки - бросить руль, и аппарат сам зависнет; и по специальной кнопочке ворочается домой. Но, погоняв своего Bebop2, понял, что эдак я никогда не научусь нормально управлять аппаратами, если они сами собой летают - у Bebop GPS-режим вообще не отключается. Попытки найти какой-нибудь гоночный квадр обычно выводили на конструкторы, с которыми я после опыта с Walkera 350 Pro пока что не готов связываться. 😃) Вообще эта (350) модель сильно подорвала мою веру в компанию Walkera, но наткнулся в интернете на “гоночную” Валкеру, и не нашёл на неё никакого негатива; на предыдущего “гонщика”, Runner250, регулярно накатывают, а 210 совсем другая модель, и её не ругают вообще. Правда, она и подороже, и не так широко распространена.
Несмотря на малые размеры - 210мм между роторами - аппарат достаточно тяжёленький, 370гр без батареи; с ней весит больше 500 грамм. Не содержит систем навигации, зато имеет встроенную камеру 700TVL, с OSD и передатчиком. Продаётся как минимум в двух комплектациях - RTF (с пультом Devo F7 и батареечкой), и BNF (дрон и 4 запасных пропа). Так как пульт у меня уже есть, то взял BNF-версию на жЫрбесте; долетела за 21 день, доставили СДЭКом до двери.
Буквально с ходу начались непонятки с аппаратом, т.к. в интернете информации по нему крайне мало, и даже во вложенной инструкции описана только RTF-версия модели. Пришлось применять “звонок другу” - и с помощью камрада Alibaba удалось победить и немного облетать аппарат.
Батарейка и связь с пультом
Во первых строках стоит упомянуть о том, что с недавнего времени липо-батарейки перестали отправлять самолётами, а дроны как раз авиа-доставкой и идут; в итоге дрон прилетает куда быстрее батареек. Walkera F210 летает на 4S-батарейках, которых у меня, например, ни одной нет, зато есть несколько маленьких (2200-2800mAh) 3S-батарей, на которые планирую пересадить свой съёмочный Bebop2 - и на них, собственно, 210-ю Валю и облетали. Для новичков 3s-батарейки, пожалуй, подойдут даже лучше. Но обо всём по порядку.
После включения батарейки аппарат сразу же принялся неистово пищать встроенным “бипером” - да, в кои-то веки в агрегат встроили пищалку. В обзорах читал, что у аппарата стоит отсечка на 14В, и дальше включается пищалка - но, как показала практика, дело не в батарее; так агрегат реагирует на отсутствие связи с пультом. То есть не проходит бинд пульта. У меня не штатный Devo F7, а куда более навороченный Devo12E, который точно так же совместим с Валкеровскими моделями, но Валю-210 упорно видеть отказывался. Помогла подсказка от alibaba - надо жмакнуть кнопку на приёмнике.
Я как раз открыл нижний отсек аппарата - снизу есть доступ к приёмнику и OSD, прикрытый панелью на 4-х шестигранных болтах, стандартных для Валкеры:
Полноформатная фотка тут.
Соответственно включаем пульт, включаем аппарат, нажимаем кнопку на приёмнике (обведена красным), и через несколько секунд приёмник “биндится” с пультом, красным диод на нём перестаёт моргать и загорается постоянным светом. По опыту Валкеры-350 рекомендую ещё проставить FixedID в пульте, для ускорения процесса бинда в будущем; как это сделать на Devo12Е, описывал ранее.
Аппарат никак не отреагировал на замену питания на 3s - даже “пищалка” не включилась. Это навело на мысли, что надо бы залезть в конфигуратор и настроить там всё.
CleanFlight, UART и настройки
Перед первым полётом, несмотря на все уверения Валкеры о “реди ту флайт”, крайне рекомендую подключить аппарат к компутеру и настроить его как надо. Например, в ранних версиях прошивки существовала ошибка, что при потере сигнала передатчика Валя включала движки на полную - и вероятность потом найти её, как вы понимаете, крайне мала. Так как никакого возврата домой тут нет ни в каком виде (даже в псевдо-интеллигент-модах, которые сейчас ставят на аппараты по $50), то при потере сигнала логичнее опускать аппарат на землю, а то и просто ронять - иначе искать его придётся на низкой околоземной орбите.
Для подключения к компу есть стандартный microUSB-порт. Некоторые компутеры отказываются видеть дрона, но это лечится установкой моста USB-to-UART (он же Virtual Serial Port). Затем дрон конфигурируется с помощью программы CleanFlight (про которую также ни слова в официальных документах от Валкеры, нашёл инфу только у немецких фанов Валкеры (на немецком 😃)). Программа может работать в браузере, но советую установить GUI-версию, особенно если планируете подключаться к аппарату в полях - она работает без подключения к интернету. И таки ставить программу желательно в браузере Chrome.
После установки программы подключаем аппарат к одному из доступных COM-портов, в режиме авто-определяния частоты обмена. Буквально за пару секунд коннект должен произойти, и мы уже находимся в меню настройки аппарата.
Первые две вкладки - Setup и Ports - не трогаем, проблем нам и без них хватит. 😃)
На вкладке Configuration можно настроить всякое, в том числе отсечку по питанию батарейки (правда, у нас не заработало).
Полноформатный скрин тут.
Обращу внимание на настройки минимального и максимального газа - мы немного их зарезали для большей плавности управления. Даже на 3s агрегат гоняет как бешеная блоха, фиг поймаешь. Так же можно поймать висение на 50% газа - хотя это, понятное дело, сильно зависит от заряда батареи и фактически бессмысленно - только для первых тестовых вылетов.
Вторая важная вкладка - настройка FailSafe:
Полноформатный скрин тут.
Чтобы ваш агрегат не убежал в пампасы при потере связи, поставьте обороты при FS пониже - при настройках на скрине он фактически сразу падает, и отключает движки. Забегая вперёд, надо сказать, что это не Фантом и не Инспаер - ему такое не страшно; а вот улёт в стратосферу таки да.
Настройки PID лучше не трогать - аппарат настроен хорошо, а чувствительность управления и борзость полёта можно настроить в других местах. Приложу скрин с заводскими настройками:
Полноформатный скрин тут.
На вкладке Receiver можно настроить управление аппаратом, и понять, какие сигналы вашего пульта что обозначают - да и вообще посмотреть, видит ли их аппарат:
Полноформатный скрин тут.
RC rate зарезали вдвое и добавили экспоненту - чтобы аппарат менее резво реагировал на управление, и не ломился вдаль при малейшем шевелении стиков; вверх-вниз он на 3s летает относительно вменяемо, но с штатными настройками из коробки по горизонтали ломится как невменяемый - по крайней мере, после “съёмочных” дронов управлять совершенно нереально. На настройках на скрине летает более-менее смирно - хотя и всё равно в разы чувствительнее к управлению, нежели аналоги Фантома; чуть только газ вперёд и всё, погнал вдаль в полнейшем ужасе.
Настройки приёмника по итогам третьего полётного дня - убрали экспоненту, подрезали немного резвость; под 4s-батарейку:

Также можно настроить полётные режимы:
Полформатный скрин тут.
Могу ошибаться, но вроде бы у него только два режима - Horizon и Angle; поставил их на переключатель режимов, который программа определяет как Aux2 (пощёлкайте тумблерами на вкладке Receiver для определения нужного вам канала; возможно, какие-то кнопочки придётся включить в пульте). Соответственно можно установить диапазон значений для каждого из значения переключателей - на скрине показал, что два значения тумблера соответствуют одному режиму; но можно, конечно, выставить вообще один полётный режим на все значения, а можно наоборот, добавить режимов и действий - лишь бы поддерживались аппаратом.
В режиме Angle аппарат стабилизируется по гироскопам и не даёт уйти в более чем заданный угол крена.
В режиме Horizon углы не ограничены и можно делать флипы и прочие перевороты в воздухе.
Краткие выводы первого полётного дня
-
Батарейка. Дрон замечательно летает на 3s-батарейках, для новичков даже более удобно - не так резво скачет в пампасы. Только отсек батарейный маловат - ещё бы несколько миллиметров, и батарейка бы влезла по ширине “лёжа”, а так приходится ставить “стоя”, это неудобно. Оригинальная 4s-батарейка куда короче, но место в отсеке более чем достаточно для длинной батарейки; её размеры 67.2mm(L) x 34.4mm(W) x 31.1mm(H).
-
Дрон весьма крепкий и не боится падений и встречи с деревьями. Случился небольшой флай-эвей и пришлось агрегат ронять с высоты деревьев - погнулся проп и немного треснуло крепление батареи, и всё. Проп выпрямили прямо на дроне и он стал как новенький - в этом плане техника замечательная.
-
Пульт Devo12E для 210-го гонщика явно избыточен - ему не надо столько каналов и крутилок, а монитор для приёма FPV-сигнала с камеры весьма убог - в пульт за $300 встроили стрёмный мониторчик на TN-Film-матрице, на солнце ничего не видно. Штатного Дево-7 хватит за глаза. Думаю о покупке FPV-очков - посоветуйте чего-нибудь, только с HDMI-входом, чтобы и Попугаем можно было управлять.
-
Для поиска упавшего дрона можно и нужно использовать встроенную пищалку - отключаем пульт и аппарат начинает мерзко пищать. Главное, чтобы батарейка не отстрелилась - а она вставляется так туго, что это более чем вряд ли.
Хотел приложить полётное видео - но сам аппарат видосы не пишет (жду посылку с Runcam2), а съёмки с земли запоролись - оператор никак не ожидал адских метаний аппарата и снимал всё трясущимися руками; в итоге ничего не видно, увы.

Продолжение следует. 😃
Сегодня наконец совершенно точно убедились, что качество картинки на Bebop2 (и 1, ибо камеры аналогичны) сильно зависит от температуры - причём, скорее всего, у каждого аппарата по-своему, но влияние есть совершенно точно.
У дронов Bebop передняя линза объектива вынесена далеко вперёд от матрицы, и из-за этого корпус объектива подвержен температурным влияниям - при нагреве расширяется, при охлаждении сжимается. В среднем, как я понимаю, аппараты настроены более-менее правильно, и в пределах рабочих температур ведут себя нормально - но, как показывает и собственный опыт, и просмотренные видео на тытрубе, температурная проблема вылазит достаточно часто, причём люди наверняка даже не догадываются, что это за фигня происходит с их аппаратом.

Bebop2 без кожуха - увы, самое интересное оказалось не в фокусе; потом пересниму ещё.
Когда приценивался к аппарату, пересмотрел все возможные видео на ютубе по Bebop2 (и многие из Bebop1), и на некоторых вылазило необъяснимое “мыло”; качество видео явно не соответствовало рекламным роликам. Выход Bebop2 пришёлся на декабрь-2015, и многие даже в Европах летали в низкие температуры (для Европы низкие, конечно) - поэтому и качество реальных сьёмок часто отличалось от рекламных видео, снятых в условиях тропиков, видимо, задолго до релиза. Лично мне было очень странно всё это - хотя байки про плохое качество сьёмок Bebop в минус я слышал ещё в прошлом году - ибо сам имею не одну экшн-камеру, и им глубоко пофиг, плюс или минус на улице - в смысле качества, конечно. А тут мистика прямо какая-то. А вот, оказывается, всё тривиально.
Многое зависит от первоначальной настройки аппарата - условно говоря, на какую минимальную температуру рассчитан объектив. Если он изначально рассчитан на “минус”, то в условиях жары может перегреваться - на это тоже жаловались в прошлом году владельцы Bebop1. Если же фокус выставлен на комнатную температуру - как у меня, хотя это, разумеется, брак - то в минусовую погоду (даже такую, которая по нашим сибирским меркам является нереальной жарой) аппарат снимает прекошмарный прекошмар:
Это как-то сложно назвать сьёмками - по-моему, камера самого первого Parrot Drone снимала лучше, лет 100 назад
К сожалению, всему виной конструктивные особенности аппарата - чувствительный к температуре пластик объектива. В идеальных условиях всё хорошо, но на краях с обоих сторон - зона брака; и, к сожалению, поделать с этим почти ничего нельзя - если только не иметь два аппарата - один для низких температур, другой для высоких. Либо же есть ещё один вариант, который мы буквально сегодня и затестили.
После многократных попыток выдвинуть линзу объектива вперёд (подогревая пластик феном при температуре 200-205C) ничего у нас не вышло - если не ломать аппарат и не знать температуру плавления пластика объектива, то ничего не поделаешь. Поэтому пришла другая идея - если мы не можем повлиять на фокусное расстояние напрямую, мы можем не давать объективу сьёживаться, то есть по старой русской традиции нужно поставить обогреватель там, где что-то мёрзнет.
При комнатной температуре дрон снимает хорошо:
www.youtube.com/watch?v=ImBWY1YL1nA
А на улице - сразу расфокус. Значит, надо постоянно греть объектив; чем и озаботились. Намотали на объектив проволоки, запитали её от батареи; на всякий случай поставили выключатель - джампер, и вуаля, готов первый тест:

К сожалению, сразу попасть в идеал не вышло - через несколько минут полёта камера всё же начинает мёрзнуть, буквально на глазах теряя фокус - вот кадр через 3 минуты, перед посадкой:

Причём, что интересно - важно именно полётное время, а не нахождение на улице - перед главным тестовым полётом мы подняли аппарат в воздух, не дождавшись фикса GPS - так что через полминутки пришлось в панике садиться, как заметили косяк. И это практически никак не отразилось на времени до расфокусировки - в двух тестовых полётах расфокус начался примерно в одно и то же время. Хотя можно будет сравнить самостоятельно.
Первая версия обогревателя явно не справляется с нашим морозцем, так что будем усиливать обогрев, и устанавливать термостат во избежание перегрева. Вес всё это имеет довольно смешной, тока потребляет пока что 0.175А (около 1% потребления дрона), так что весь этот наш колхоз практически и не снижает лётные качества аппарата - за 10 минут тестовых полётов в -7С просадили батарейку до 43%. А вот его сьёмочные качества улучшает кардинально, позволяя ему снимать в хорошем качестве за границами рекомендуемых температур. Когда доведём технологию до ума, выложу более подробный отчёт - как, что и зачем сделано.
Первый полёт - видео с телеметрией (максимальное качество видео).
Второй полёт - исходный файл, без телеметрии
Как снимал этот же дрон пару дней назад без подогрева:
На выходных снова погоняли дрона - по-прежнему отлично летает и всё так же хреново снимает; хотя по части сьёмок есть некоторое улучшение; возможно, всё же дело в температуре.
Полетали в относительно сильный ветер - до 10 м/с:
Аппарат сильно кренится, но летает замечательно.
Затестили дальность управляемости с телефона Nexus4 -
Данный тест слегка отличался от предыдущих - так как телефон был не мой, управлял аппаратом хозяин телефона, причём учился прямо на лету. 😃 И, как ни странно, научился - включая полёты по картинке, практически от FPV. 😃 Поэтому полёты тут хаотичны, а не типовой тест вперёд-назад. Аппарат показал управляемость с Nexus4 до 115m, правда, после потери сигнала он так и не восстановился - возможно, это беда всех Нексусов, у моего планшета аналогичная ерунда - не хочет коннектится к вайфаю после обрыва связи. Возможно, надо поставить какую-нибудь программку и поможет.
В последнем вылете слегка улучшилось качество картинки - хотя мы ничего с аппаратом не делали; возможно, он слегка оттаял, ибо температура второй день стоит выше нуля - однако накануне (при полётах в ветер) было теплее. Возможно, у земли всё равно было прохладнее, а сейчас он прогрелся и начал таять, вот и аппарат отреагировал.
Также обращу внимание на поведение батарейки - при сегодняшних полётах расход батареи существенно лучше, чем накануне и в остальных полётах.
В первом полёте за сегодня летали 11 минут и ещё осталось 40% батарейки - ранее такое оставалось после 7-минутного полёта. И второй полёт тоже показателен - при довольно активном полёте за 4 минуты батарея просела только на 20%. Видимо, всё-таки в плюс летать намного лучше 😃))
Вольный перевод статьи blog.parrot.com/2015/05/28/add-gps-overlay/
Дроны Parrot Bebop пишут телеметрию полёта, которую потом можно наложить на снятое ими видео, для чего потребуются две программы:
Flight Data Manager последней версии; эта программа извлекает из Drone Academy данные о телеметрии полётов, выгруженные с гаджетов, которыми вы управляли во время этих полётов, и записывает их в файлы у вас на диске. Drone Academy - это база данных полётов, включающая ваши полёты автоматически, из программы Free Flight, с помощью которой мы аппаратом и управляем.
Virb Edit - видео-редактор, позволяющий накладывать данные о телеметрии на видео с дронов.
Скачиваем FlightDataManager, раз-зипуем, устанавливаем.
Скачиваем Virb Edit, устанавливаем, пока не запускаем.
После установки и того и другого запустите FlightDataManager и нажмите кнопочку “Install Garmin Virb GPS Templates for Bebop” - это установит шаблоны для Bebop в программу Virb Edit. Это, конечно, можно будет сделать в любой момент, но потом это потребует перезагрузки Virb Edit и вы потеряете время, пока будете догадываться, почему нужных шаблонов нет в списке.
Затем во Flight Data Manager нажимаем Load Data from Drone Academy - для первого раза от вас потребуются логин-пароль от вашего акаунта в Drone Academy, потом программа сама всё запомнит (или нет, если нажать сооцную галочку). Загрузится ваш список полётов - здесь фактически приведены не столько полёты, сколько записи видео, выгруженные с гаджетов в Drone Academy. Лишние записи можно удалить, они удалятся из Drone Academy навсегда-навсегда. Нужный полёт выбираем по любому из параметров - дальности, высоте, времени, длине записи - последнее имхо самый верный способ.
Выбрали, двойной клик по строчке - откроется окно графика полёта, где надо нажать Export Data to Files (подсвечено зелёным, причём не мной):
Указываем папку, куда выгружаем файлы; рекомендую для каждого полёта делать свою собственную папочку, которую потом можно будет снести. После выгрузки файла больше FDM нам для данного конкретного видео не потребуется, можно закрывать (если только вы не забыли выгрузить шаблоны отображения наложений в самом начале).
Теперь запускаем Virb Edit. В статье-туториале описан англоязычный интерфейс, а сейчас доступна русскоязычная версия программы, что несколько усложняет процесс освоения - поэтому, собственно, статью и пишу.
В самом начале жмём “Создать видео”:
В окне вводим название видео - оно потом будет использовано при итоговой выгрузке видео. Допускаются русские буквы. Жмём “Создать видео”.
Откроется окно видео. Жмём Импорт видео:
В открывшемся окне нажимаем “Импортировать другие”:
Снова
Выбираем видео, которое соответствует данным нашей телеметрии, выгруженной из FDM ранее. В открывшемся окне нажимаем “Только импорт” и потом Ок. Снова открывается окно библиотеки, в котором надо перетащить наш импортированный файл в рабочую зону внизу экрана:
Перетаскиваем нужное видео вниз экрана и в левом верхнем углу появляется отображение нашего видео. Далее переходим в меню “Наложения”:
Здесь жмём кнопку G-Metrix, что переводит нас в меню G-Metrix, где нам надо указать файлы телеметрии, выгруженные ранее в FDM. Жмём “Импортирование G-Metrix”:
В открывшемся меню файлов телеметрии жмём “На моём компьютере”:
Здесь жмём “Обзор” и выбираем файл из папочки, куда выгружали данные телеметрии из FDM.
Обращаю ваше внимание, что файл нужно выбирать тот, который заканчивается на Meters.fit; если вы не фанат английской системы мер.
Затем в открывшемся окне нажимаем “Использовать этот журнал”:
Откроется окно видео-файла с уже наложенной телеметрией, которую остаётся только правильно отобразить. Для этого переходим в меню “Наложения” и отматываем список шаблонов вниз - там будет целая масса (8 штук 😃) шаблонов для Bebop; можно выбрать более подходящий вам.
Остаётся только нажать кнопку Экспорт вверху окна и в последнем окне указать итоговые параметры видео:
Bebop снимает в HD 30 fps, выше разрешение ставить не имеет смысла, задирать FPS - также. Если вам не нужно мега-качество видео, можете не трогать никакие настройки вообще - только укажите разок путь для выгрузки файлов и запускаем процесс кнопкой “Экспорт”. На экспорт может уйти немало времени - особенно для долгих полётов - это нормально.
Итоговое видео. Не обращайте внимание на качество - это так снимает мой Bebop2 из коробки.
Возможные проблемы:
-
Не выгружаются данные полётов в Drone Academy - запустите Free Flight на гаджете, с которого управляли дроном, при включённом интернете; дождитесь, пока значки выгрузки не пропадут с фона Drone Academy на основном экране программы.
-
Недоступны шаблоны от Bebop в Virb Edit - закройте его (данные сохранятся), зайдите в FDM и нажмите уже “Install Garmin Virb GPS Templates for Bebop”.
Разумеется, наложение телеметрии на видео - вещь сугубо добровольная, и не обязательная для большинства полётов - но для тестовых и необычных полётов весьма полезно уметь ей пользоваться.
В продолжение записи “Первые тесты Бибоп2”.
Сегодня снова полетали на Bebop2, на этот раз в чуть более жёстких условиях, чем раньше - температура на градус упала, до -7С, и поднялся существенный ветер; дрона ощутимо сдувало. Тем не менее полётные качества Попугайчика по-прежнему на высоте, и он, как обычно, не даёт повода нервничать - хотя, после года постоянных катастроф на Walkera350Pro и самодельных дронов, каждый полёт по-прежнему воспринимается как последний.
Несмотря на относительно суровые погодные условия, потестили дальность управления Скайконтроллером - в первый раз улетели на километр и поднялся ветерок, дрона кренило чуть не на 30 градусов влево - пришлось в панике возвращать. Во второй раз ветра было меньше, и удалось улететь на 1389 метров - но сигнал там уже постоянно пропадал, и, в отличии от всех остальных тестов дальности, мы не возвращали аппарат после первой же пропажи сигнала, а пытались улететь дальше снова и снова. Возможно, дальность можно увеличить подъёмом дрона выше - он был на высоте 20 метров и, скорее всего, на бОльшей высоте будет управляться дальше. Но вот на этой высоте дальше 1 км. управление и картинка регулярно косячились и лететь было не комфортно - так что по сути эффективная управляемость дроном со СК получается в районе 1000-1100 м (для высоты 20m в идеальных условиях). Хоть это и не заявленные 2 км, но имхо всё равно крайне неплохой результат для такой малютки - даже просто слетать туда-обратно у нас заняло 7 минут.
Также затестили дальность управления с телефона. Я уже привык к большим цифрам, и после взлёта давлю тапку в пол - но для моего старого телефончика Highscreen AlphaR сигнал терялся в 100 метрах, в двух тестах - причём, возможно, часть расстояния дрон пролетал по инерции. Так что телефон показал в разы худшую дальность управления, нежели планшеты - хотя в домашних условиях не вижу между ними особой разницы в приёме WiFi-сигнала, местами телефон берёт даже лучше. Возможно, Нексус умеет в какой-то продвинутый WiFi, раз лупит на пол-километра. Но тут всё чётко запротоколировано - телефон теряет сигнал в радиусе прямой видимости. Управление аппаратом с телефона - вполне годное, хотя, опять же, надо приноровиться - экранчик небольшой и всё лапами закрыто, еле-еле видно, куда же мы летим; хотя на такой дальности это не особо-то и нужно.
В ветер аппарат управляется хорошо, против ветра копытит будь здоров, мощи хватает. Из серьёзных недостатков обнаружена (подтверждена) некорректная работа датчика сигнала батареи на низких уровнях - ниже 50% заряда значения отображаются скачками, и доверять им поэтому не стоит - вы можете считать, что заряд батареи 40%, но через секунду он станет уже 27%, а потом через произвольное время и все 14% - так что на серьёзные дистанции летать только с полной батареей, выше 50% таких приколов не заметил. Возможно, дело в подмерзании батареи - хотя сразу после посадки брал аппарат в руки и он явно был не замёрзший, батарея ведь слегка греется в полёте… Также, в последнем вылете, почему-то СК не жужжал при низком заряде батареи - хотя, возможно, он “заводится” ниже 10%; заряд скачкообразно переместился с 27% на 14% и оставался таким добрые полминуты, невзирая на манёвры.
В прошлой статье забыл предупредить, что в настройках видео есть единственная настройка - AntiFlickering mode - и на улице её трогать вообще не надо; если случайно туда тыркнетесь, то запорете себе все видео - оно пересвечивает картинку и даже управлять становится сложно, не то, чтобы видео смотреть. В условии помещения - возможно.
Проблемы с видео у меня, скорее всего, всё-таки из-за расфокусировки; аналогичные проблемы бывали и на первом Бибопе, и тут, похоже, то же самое - аппарат у меня новый, ни разу ещё не падал (!!! - для меня это вообще мега-достижение, обычно в день по нескольку раз аппараты прикладываем). Думал, что видео плохое из-за неправильного обсчёта пересвета - но нет, похоже, всё-таки кардинально сбита резкость камеры; заехали в лес и полетали в тени - то же самое.
Тест видео в лесу
Аппарат очень чётко держит точку и никуда не гуляет - на видео видно, что кругом очень тесно и совсем рядом деревья и проезжающие машины, и тем не менее аппарат стабильно висит и хорошо управляется с планшета, никакой тревоги и паники. Над аппаратом в нескольких метрах - провода, и опять же ему всё равно. В таких условиях запускать другие дроны я бы не решился.
Из температурного - в первые два полётных дня в безветренную погоду управлять с планшета можно было без проблем и руки не мёрзли (если только не держать чугуниевый iPad всё время), а сегодня было совсем некомфортно, и во время тестов дальности СК управлял аппаратом в толстых зимних перчатках - без проблем, что стики управления, что подруливание камерой. Всё-таки СК рулит. 😃
При наличии только одной батарейки становится важна скорость её зарядки - мы заряжемся прямо в поле от авто-инвертора, и тут относительно мелкая (2700mAh) батареечка Бибопа2 существенно выгоднее здоровых батарей 350+ квадров - у Фантомов2+ и аналогов батареи вдвое больше, соответственно и заряжаются вдвое дольше, а летают они столько же. В полевых условиях - полезненько.
Осталось разобраться с резкостью картинки, и аппаратом буду полностью доволен. Примерно такого же поведения ждал от своих предыдущих дронов, но кроме испорченных нервов и немалых финансовых трат мало чего от них добился - а тут всё из коробки и работает. Будем немного подрабатывать технику напильником, вестимо - особенно это касается СК, там надо отвязаться от старой батареи Бибопа1 и придумать адекватное крепление для планшета 7" со светозащитным кожухом (мой СК, повторюсь, куплен с рук, по идее СК идёт с и с тем и с другим в комплекте) - сейчас свой Нексус7 креплю в разъём для телефона, туда он входит на пределе и грозит выскочить, к тому же центр масс смещается сильно наверх; хотя так даже лучше видно картинку. Даже и без шторок в солнечный день в снежном поле картинку на Нексусе нормально видно - на iPad4 и HS AplhaR всё сильно хуже, увы, так что гаджеты для управления надо подбирать. Свою рекомендацию я уже сделал 😃
Имхо - отличный дрон. Пока что покупкой доволен на 75%, из которых 25 - качество видео. Уверен на 99%, что это лечится.
PS: для наложения телеметрии на видео нужно загрузить данные о полёте из Drone Academy, причём я долго не мог понять, почему они то выкладываются, то не выкладываются. Оказывается, надо просто открыть FreeFlight на главной странице и подождать минутку, пока данные не выгрузятся - если есть не-выгруженные полёты, там рисуется значок выгрузки. Причём сделать это надо со всех устройств, на которых летал - если это надо, конечно. Данные о полётах можно потом удалить - по крайней мере, через FlightDataManager.
Недавно приобрёл новый (модель декабря-2016) дрон Parrot Bebop2, с приключениями - и вот только сейчас дошли руки его облетать. По мотивам первых двух полётных дней есть что рассказать/показать.
Общие слова
Почему Bebop2 - ранее писал в своём ЖЖ. В теме дронов относительно недавно, всего год, и уже устал биться головой об Walkera 350 Pro и Phantom FC40 (последний летает, но почти что не снимает, а Валя наоборот) - и решил приобресть компактый аппарат от французов из Parrot; хотя в среде дроноводов к нему отношение как к игрушке, мне этот аппарат идеально подходит ввиду того, что много езжу, и нигде дрон не является моим основным занятием - максимум могу выдернуть полчасика на полёты, и ради этого таскать здоровенные аппараты немного не айс. В этом плане Bebop1-2 заруливают фантомоподобные кастрюли на раз-два. Правда, видео с него, конечно, похуже - в моём случае НАМНОГО похуже, но об этом позже.
Bebop2 - дрон 290 размера (Bebop1 был 250-го), весит 500г (против 400 у Бебоп1), и находится между гоночными аппаратами и летающими камерами. В плане “погонять” он не очень подходит - хотя скорость набирает приличную и лага сигнала почти нет, но встроенная стабилизация не даёт почувствовать наклоны аппарата - только по метке можно ориентироваться; да и камера с процессором по сути - лишний вес. Для сьёмок у него относительно плохое качество картинки - хотя и FullHD*30fps, с отличной стабилизацией программым способом, но качество этой картинки похуже даже обычных экшн-камер, не говоря уж о 4К-понтовостях Фанта3 и прочая.
По умолчанию дрон управляется с планшета или телефона (с телефона неудобно - картинку не видать из-за рук); приложение поддерживается на Андроиде и iOS. Можно докупить отдельный пульт по фамилии SkyController - они подходят для всех моделей Parrot, так что пульт от Бибоп1 подходит для Бибопа2, и наоборот. Одно “но” - пульт питается от батареек своего дрона, а батареи тут не совместимы.
Bebop2, Скайконтроллер от Бибоп1 и батарейки к ним - обратите внимание на разъёмы.
В отличие от Bebop1, Bebop2 поставляется по умолчанию с одной батарейкой - это стоит учитывать при покупке; я как-то понадеялся на старые данные, и теперь обламываюсь с полётами - пока не придумаю, как запитать дрона от обычной ЛиПошки, так и буду с одной батареей, ибо по новому курсу они какие-то золотые получаются.
Живу я в Сибири, тут, разумеется, холодно, и всю зиму - по крайней мере, календарную - тут честный минус, так что нынешние -5С это скорее аномалия, чем норма. И тем не менее дрон на них реагирует весьма существенно - возможно, именно поэтому он выдаёт плохое качество картинки; не говоря уж за просадки батареи. Самодельным дронам мороз нипочём, а вот нежная французская техника слегка страдает.
Качество - караул.
Менее чем за 7 минут полёта съедено более 50% батареи.
Управление через Скайконтроллер
Тем не менее, к полётным качествам аппарата пока что претензий нет. Из коробки там все параметры зарезаны под полных новичков - хотя в плане управления и я далеко не профи, тем более с планшета управляю действительно впервые; тем не менее, на наших просторах так и хочется втопить по полной - поэтому все наклоны, скорости и дистанции выставлены на максимум, и вперёд.
Летаем пока что в одном месте - на Обском море, тут зимой больше всего пространства, минимум людей, и всё совсем рядом с цивилизацией, далеко ехать не надо. Соответственно можно легко погонять, без опаски куда-нибудь врезаться, как это бывало на нашем летнем поле (где сейчас - лыжная трасса и полно народу), да и искать дрона в снегу попроще, чем в траве.
Вчера, во время сьёмок вышеуказанного видео , поставил наклоны (Max. Inclination) до 35 градусов - это максимум без хакерских методов в программе FreeFlight (существуют и другие программы, пока не пробовал) - в итоге постоянно в кадр винты лезли. На второй день поставил наклоны 30 градусов - всё равно, при газовке вперёд край кадра лезет в кадр; так что для сьёмок наклоны надо резать ещё сильнее. У Бибопа2 камера сильнее наклонена вниз, и может смотреть на 90 градусов “под себя” (правда, тоже край кадра лезет чёрными пятнами), это надо учитывать в сравнении с Бибоп1.
Да, изначально я не был уверен, что на Бибопах можно управлять “камерой” - тут же нет подвеса - тем не менее - можно, причём это имеет практический смысл даже больше, чем у Фантиков. Если вверх-вниз всё понятно (в конце видео - посадка по камере), то тут ещё имеется смысл и влево-вправо камерой качать - из-за особенностей программной стабилизации при наклонах аппарата влево-вправо видео тоже наклоняется влево-вправо, и в кадре появляются “лесенки” там, где их отродясь не бывает - на всех горизонтальных линиях. Можно повернуть аппарат по ветру или направлению движения и рулить камерой влево-вправо, избегая этих самых “лесенок” - правда, повороты камеры тут невелики, и тем не менее.
Управление камерой реализовано и с планшета, и со Скайконтроллера - конечно, много проще подрулить физической кнопкой, чем елозить лапами по планшету, и тем не менее всё вполне реально, ничего сложного; камера вращается сдвижкой изображения двумя пальцами - главное не сдвинуться куда-нибудь на кнопку Emergency.
Управление аппаратом также реализовано с планшета и Скайконтроллера - разумеется, с пульта на порядок удобнее, и руки-крюки не загораживают картинку; тем не менее с планшета тоже можно управлять, и при определённой сноровке можно делать всё то же самое, что и с пульта. Можно также использовать внешние физические джойстики для управления - не проверял, мне СК хватает. 😃
Про планшеты и тесты дальности
В первые два дня проверял аппарат на управляемость с планшетов iPad4, Nexus7-2013, и их же в сочетании со Скайконтроллером. Небольшой сравнительный анализ:
iPad4 лучше своими размерами, на которых хорошо видно картинку (правда, из-за глюков моего аппарата это сомнительный плюс, картинка примерно 320*200 пикселей и точно так же может смотреться хоть на телефоне), а также автоматическим поиском дрона по Wifi - сразу после включения оно автоматом определяет дрона (впрочем, мой андроид-телефон поступает точно так же). Ещё его проще установить в Скайконтроллер - он как раз туда по размеру влазит и хорошо крепится.
Тест дальности на iPad4 показал управляемость до 340 метров, далее - пропажа сигнала и авто-возврат домой; причём восстанавливался сигнал довольно долго, через 40 секунд, за которые дрон успел пролететь ~250 метров - см. видео:
340 метров - это имхо неплохой результат, даже учитывая идеальные условия.
Но, как ни странно, Nexus7, аппарат на год младше iPad4, оказался лучше для управления по всем параметрам. Единственный минус - размеры - слишком много закрывают руки, и видно только центр кадра; ещё он почему-то не хочет цепляться к вайфаю дрона автоматом, и всё время переспрашивает - “вы хотите подключаться к вайфаю без интернета?”, причём выбор не запоминает.
Зато в полёте у него на экране всё гораздо лучше видно - эпловский IPS-экран натурально слепнет на солнце, и что-либо рассмотреть на нём весьма сложно. Но самое главное - во время теста дальности управления он показал управляемость до 560 метров, причём сигнал не пропал, а просто выскочила надпись “Bad signal” - решили не рисковать и нажали RTH.
При этом я стоял и держал планшет боком к аппарату - из-за солнца; во время теста iPad солнце зашло и тут уже можно было направлять планшет прямо на аппарат.
Во время полёта на iPad было вообще ни черта не видать - летел тупо вперёд и всё; тогда как на Nexus слегка подруливал, чтобы лететь вдоль дорожек - заодно проверял управляемость; это видно по завихрениям маршрута. 😃
Телеметрию накладывал по официальной методике от Parrot - с использованием программ FlyDataManager и VirbEdit; написал статью, как сделать так же.
Если кто-то засомневается, что данная дальность достигается через какие-то другие девайсы - вот вам скрин из FDM:
Тут видно, кто с чего летал, какие дальности-скорости и всё такое.
Про Flight Plan
Также воспользовался платной функцией FlightPlan - за её активацию придётся выложить порядка 1200 рублей на Андроиде и 1400 на iOS - причём вроде как заявлено, что на одном акаунте можно заходить с разных систем; но после покупки FP на Nexus (под андроидом) iPad у меня никак не хочет разблокировать FlightPlan - хотя на андроид-телефоне всё махом завелось. Разумеется, акаунт везде один и тот же. Буду разбираться - вот уж для чего iPad и сгодится, так это для вдумчивого рисования полётного плана.
Сама функция полётного плана слегка не-очевидная - я смог разобраться только после вкуривания инструкции на сайте тех. поддержки Parrot. В целом же всё выглядит интересно - можно не просто гонять по точкам, но также выставлять направления полёта от точки к точке, скорость полёта, высоту точки само собой, действие в точке, паузы и т.д. - причём всё достаточно просто. Однако всё же требует определённого освоения.
www.youtube.com/watch?v=v0EyZQvbUjc
Видео первого теста полётного плана
“Под замочком” - чтобы не спамить ленту подписчикам канала; так-то ничего секретного там, конечно, нет.
Первая точка полёта у меня оказалась выставленной на 3 метра вверх - при этом оказалась довольно далеко в стороне (мой косяк), и при первом запуске аппарат вместо полёта начал… прыгать к ней 😃))
Прыжки вызваны срабатыванием датчика высоты, я аппаратом не рулил совсем.
Соответственно перед исполнением полётного плана на видео аппарат был поднят метров на 10 и только после этого была подана команда на запуск плана. Между полётным планом и свободным полётом можно переключаться в процессе полёта.
Про SkyController
Стандартный пульт от Bebop1-2 - Скайконтроллер (сокращённо СК) - огромная махина с оригинальным дизайном; весьма неудобна при переноске и перевозке, зато в полёте всё хорошо, эргономично и сбалансировано. Напрягает только кнопка Emergency под правой рукой - при случайном нажатии аппарат просто выключится и упадёт; но вроде бы оно утоплено и надо ещё постараться туда попасть.
Оригинальный СК идёт с адаптером под планшет 7" и светозащитным экраном - я брал с рук и остался без этих прелестей дизайна; зато и обошёлся он мне в 21 тыр, а сколько он сейчас по новому курсу стоит - даже страшно и загадывать. Да, пульт стоит чуть ли не дороже самого дрона, так что если просто полетать-побаловаться, то запросто можно обойтись и планшетом - при таких-то дальностях управления… Потом потестим дальности и на других гаджетах - особенно если это кому-то интересно. 😃))
Но, надо сказать, СК не просто является пультом и прокси-сервером между планшетом и аппаратом - он добавляет некоторых функций. Как минимум, он показывает заряд батареи дрона отдельнымисветодиодами . А также , что мне было уж совсем неожиданно - показывает местоположение дрона относительно положения и направления СК - слева внизу, вместо левого круга управления. Не очень понятно, почему эту фичу не прикрутили для планшетов без СК, но прикольно - для визуального поиска дрона в небе.
Потестить дальность с СК у нас не получилось - батарея замёрзла и при старте на 57% заряда через 300 метров разрядилась до 27% - после чего решили не рисковать и вернули аппарат домой. Судя по приведённому выше скрину, 300-350 метров для СК - типовое расстояние, где нет и признаков потери сигнала, вне зависимости от расположения дрона. Разумеется, попозже затестим дальность и у СК.
В планах - слетать на упомянутый в видео остров Тайвань, что в 3 км - туда даже СК не дострелит, скорее всего, только по полётному плану можно долететь; это чревато, но интересно. 😃)) Ну и, разумеется, надо решить пробему с видео - летающая камера с таким качеством - это никуда не годится. Даже управлять-то по такому качеству сложновато - три пикселя на экран; что уж говорить за просмотр видео. Письмо в саппорт Parrot уже ушло, жду ответа.
 Фоточки с аппарата тоже не блещут - что-то случилось со всей системой в целом: fotki.yandex.ru/next/users/xommep/…/1330038
Фоточки с аппарата тоже не блещут - что-то случилось со всей системой в целом: fotki.yandex.ru/next/users/xommep/…/1330038
Если не разобью и не потеряю дрон - тема будет продолжаться ещё долго. 😃
Пульт Devo12E - сложная и непростая конструкция от компании Devention, которой оснащаются все продвинутые модели от Walkera - с 350Pro до Voyager3. Но разобраться в ней зачастую непросто, даже когда оно идёт в комплекте с аппаратом, поэтому пошагово опишу настройки пульта.
Базовая навигация в меню пульта: вход в меню по ENT; далее EXT - сброс, ENT - выбор, UP/DN и R/L - вверх-вниз и влево/вправо (что зачастую равноценно).
Прошивка
Для начала следует обратить внимание на прошивку: Ent - System Menu - About. Если прошивка (software) ниже 1.5 или версии B - смело переходим к обновлению прошивки, хуже не будет.
Существует две основных версии прошивки - 1.5 Pro (с настройками стиков и прочими полезностями) и 1.6 lite (удобная, но без настроек). Для начала работы крайне рекомендую выставить прошивку 1.5А.
Буквенные литеры прошивок олицетворяют максимальную мощность передатчика - для B-версий она ограничена 10 mw, т.е. +10dB; А-версии позволяют выставлять 100mw, т.е. +20 dB (System menu - Power Amplifier). А больше ничем они не отличаются, так что про В-версии смело забываем.
Важно - не стоит тут же выставлять максимальную мощность пульта, её в любой момент можно откорректировать. Для настроек хватит и минимальной - на максимуме пульт жрёт батарею, как не в себя. Кстати, по поводу батареи для пульта - имхо идеально для этого подходит батарея от Фантома-1 - по размерам влазит, сильно не болтается, заряда хватает на полётный день (при мощности +10dB-).
Итак, если надо обновить прошивку… Скачиваем программу прошивок с сайта разработчиков: www.iuasinc.com/firmware/ (Devention Dfuse USB Upgrade Tool). В ней есть 2 инсталлятора - devodfuse.* и walkera_dfuse*.* - рекомендую ставить последнюю (walkera*), первый инсталлятор лично у меня не позволил загружать файлы конфигурации моделей в пульт. Скачиваем-устанавливаем-запускаем.
Подключаем пульт по Mini-USB к компутеру и включаем его, зажав кнопку EXT. Пульт перейдёт в режим связи по USB, как бы остановив загрузку посередине. Дожидаемся определения пульта компутером - в нижней строчке программы Dfuse должна появиться строчка devention Devo-F12E…
Прошивки пульта можно взять там же, на сайте разработчиков (например, тут). Находясь на вкладке Firmware, выбираем нужный файл прошивки (например, DEVO-F12E 32 v1.5A.dfu), жмём Upgrade, ждём загрузки == Profit! Выкл-Вкл пульт (уже без зажиманий) == готова новая прошивка. С прошивками от Devo у меня не было никаких проблем, хотя перепрошивался часто и с особым цинизмом - только попытки перейти на прошивку от Deviation (тестовую) как-то привели к зависанию пульта - но откат к “родной” прошивке помог. Так что не надо бояться перепрошивок.
Если же вы поломали какие-то настройки пульта, вам может понадобиться возврат к настройкам модели - надо скачать по той же ссылке файл модели для вашего коптера (350Pro, Scout итд - для Devo12e) - и загрузить тем же методом, что и прошивку, только уже на вкладочке Config программы Dfuse - не Upload (это бэкап настроек с пульта), а Upgrade; в меню Number указывается позиция модели в настройках пульта. На эту тему есть хорошее англоязычное видео.
Пульт не биндится с аппаратом (350 Pro)
Частое явление, судя по форуму (включая и собственный опыт) - после включения аппарата он начинает истерически моргать левым глазом и пульт в упор не видит.
Чинится просто - первым включается не пульт, а аппарат; то есть пульт выключаем, аппарат включаем - только потом включаем пульт. Довольно быстро приёмник находит пульт и истерика сменяется медленным миганием - пошёл обмен данными. Чтобы такой ерунды больше не случалось, прописываем Fixed ID после коннекта пульта и аппарата: Model Menu - Fixed ID - включаем, подтверждая выданные циферки (ничего менять не надо). Всё, теперь аппарат и пульт будут включаться в любом порядке.
Настройки телеметрии
Даже при поставке из коробки зачастую пульт не видит телеметрию аппарата, хотя должен. Попробую показать настройки, нужные для отображения данных GPS и вольтажа на аппарате (хотя тут могу быть не точен, в данный момент аппарат ничего не показывает 😃))
Вольтаж надо настроить через программу Mission Planner. Первым делом смотрим на нижний угол полётных данных - если там показываются данные вольтажа, то в настройках всё в порядке, и на пульте вольтаж должен отображаться в режиме Sensor View. Если у вас аппарат разобран и отключён GPS-модуль, то вольтаж показываться не будет (данные о напряжении передаются в приёмник 703 по тому же шнурку, что и GPS-данные).
Если же вместо вольтажа показываются нули (при подключённой батарее, конечно), заходим в меню Config/Tunung - Standard Params и выставляем там значения переменных в самом верху - Battery Monitoring в Analog Voltage Only, а Battery Voltage sensing pin в A13, после чего жмём Write Params:
Вольтаж батареи должен отобразиться на экране Flight Data, и соответственно на пульте тоже - в режиме Sensor View.
Важно - в недавних версиях Mission Planner какой-то гений добавил режим Battery Monitor, в котором можно легко испохабить значения отображаемого вольтажа батареи. Поэтому, если у вас при подключённой батарее показывается откровенная ахинея вместо вольтажа (может 1В быть, а может и все 150В): идём Initial Setup - Optional Software - Battery Monitor и настраиваем значения под себя. Я настроил так:
В моей версии пульта по умолчанию выставляется решительно бесполезный режим отображения данных на мониторчике, и его нужно всегда переключать в Sensor View. На прошивке 1.6 это делается нажатием кнопки L, а вот в 1.5 придётся зайти в Function menu - Sensor View - и уже там нажать L - только в этом режиме показывается вольтаж и GPS-данные.
Высота
Если у вас вместо высоты показывается 0 или какая-то ахинея, значит, у вас пульт находится в режиме значений высоты Relative (ему там плохо). Заходим в Model Menu - Sensor Settings - GPS setting (ессно статус должен быть Active) - и там выставляем Attitude type - Absolute. Теперь пульт в режиме Sensor View должен показывать разницу высот между точкой взлёта и положением аппарата.
Настройка тумблеров и крутилок
Для назначения каналов на тумблеры и крутилки пульта вам потребуется версия прошивки 1.5 (в 1.6 нет соответствующих режимов).
Заходим в Model Menu - Device Output и видим там список каналов, на которые можно назначить либо тумблеры (они называются так же, как и подписаны на корпусе - например, переключатель режимов по умолчанию - MiX SW), либо крутилки (они называются AUX* KB - левые малая и большая крутилки - AUX4 и 5, правые малая и большая - AUX 7 и 6 (не спрашивайте, почему именно так)). Для того, чтобы что-либо отзывалось на команды, это что-то надо включить - перевести в положение Active. Мотать вверх-вниз можно кнопками UP/DN, выбирать значения - L/R.
Получившиеся настройки можно лицезреть в Function menu - Monitor.
Чтобы увидеть, отзывается ли коптер на нажатия кнопок, заходим в Mission Planner: Initial Setup - Radio Calibration, здесь можно жмакать тумблеры и видеть результат на соответствующих полосках.
Приведу небольшую табличку соответствия каналов в пульте и в MP для стандартной комплектации Walkera 350 Pro (передатчик 703):
Gear - Radio5 (обычно - переключатель полётных режимов)
Flap - Radio 6
Aux2 - Radio 7
Aux3 - Radio 8
Наклон подвеса взад/назад (Pitch) - Aux5
Наклон подвеса влево/вправо (Roll) - Aux6
После настроек тумблеров архи-рекомендую зайти в режим Config/Tuning - Extended Tuning и настроить тумблеры на осмысленные действия - раз у нас толстый пульт с кучей каналов, почему бы этим не воспользоваться. 6 канал (Flap в терминологии пульта) можно настроить на гибкое изменение атрибутов в полёте (иногда используется при настройке PID), а на 7-8 каналы назначаются грубые действия навроде RTL, Land или, например, Autotune:
Например, выносом RTL на отдельный тумблер освобождаем режим с переключателя режимов - и лёгким движением руки получаем 4 полётных режима вместо 3-х.
Соответственно, можно изменять настройки тумблеров так, как вам больше нравится. Например, некоторые можно отключить вовсе, а некоторые наоборот, продублировать на несколько действий сразу.
Как поменять местами стики управления и добавить подпружинивание газа
Наш пульт позволяет менять местами ручки газа и поворота - программно, с помощью переключения System menu - Stick Mode (1 - правый газ, 2 - левый газ); это можно попробовать поменять безопасно. Но из-за того, что один стик у нас подпружинен, а другой нет, по-нормальному поменять стики местами не выйдет - придётся разбирать пульт и переставлять блокирующую пружинку пластину. Как это сделать - описано в инструкции к пульту. Важно - если разблокировать пружинку не подпружиненного стика (открутив блокирующую пластинку), то можно превратить наш пульт в пульт от Фантома (шутка юмора) - имхо для сьёмок и для новичков очень полезно иметь автоматически зависающий аппарат.
Если что не так - пишите, будем разбираться. У самого после кучи крашей и полной пересборки аппарата многое не работает. 😃) Но первоначально именно так всё и настраивал.