Данная статья не будет интересна специалистам, или просто разбирающимся людям, но, возможно, она хоть чуть-чуть упростит решение вопроса таким-же как я новичкам, которым впервые в руки попала эта OSDшка и на которых свалилась куча иногда противоречивой информации с сайтов на разных языках.
Из всех полётных контроллеров серии “сделай сам” я решил остановиться на AIOP, как на самом, как мне кажется, продвинутом.
Ну и, разумеется, если уж на аппарате есть видео - хочется и OSD.
Самым простым и самым доступным на сегодня способом организации OSD является MinimOSD, или MavlinkOSD, что, по сути, одно и то-же. Ревизий и внешних видов этих плат - огромное количество, но форм-фактор и принципы одни. Сегодня существует ещё одна плата, построенная на том-же принципе - Micro MinimOSD. В ней уже доработано питание, выведены необходимые разъёмы на измерение напряжения бортовой сети, видеосистемы, разъём датчика тока и разъём для измерения RSSI.
Однако я-же стал “счастливым” обладателем именно Mavlink OSD. Основной проблемой этого девайса является частое сгорание микросхемы MAX7456, которая, собственно, и отвечает за наложение информации на видео.
В этой плате питание цифровой части, на которой расположен процессор ATmega, отвечающий за обработку данных с полётного контроллера и питание аналоговой части, от которой питается вышеозначенный MAX разделены.
Дело в том, что любой преобразователь питания даёт помехи на аналоговый видеосигнал. При использовании качественных преобразователей этот (д)эффект может стремится к нулю, но в некоторых случаях он может весьма заметно мешать жить. Для этого цифровая часть платы питается от самого полётного контроллера, который в свою очередь питается от BEC-а, а на аналоговую положено подавать 7-12 вольт от отдельной батареи, питающей камеру и видеопередатчик.
Однако, везде настоятельно рекомендуют объединять питание обеих частей. Теоретически, так реже сгорает MAX, а практически, у нас меньше проводов. Для объединения питания нужно запаять землю и плюс. Землю проще всего запаять зачистив два небольших пятачка на задней части платы и спать перемычку между ними.
Так-же сзади удобнее припаять проводок к +5 цифровой части и вывести его через отверстие на наружную сторону платы.
Второй конец положительного провода нужно припаять к одному из хвостов дросселя. В разных ревизиях плат этот хвост может быть с разной стороны. Проще всего отследить дорожку от “+” аналоговой части до дросселя и припаять провод к противоположному хвосту.
Чтобы случайно по забывчивости не подать на плату 12 вольт, и чтобы оставшиеся неудел иголки можно было использовать как перемычку, рекомендуется прорезать дорожку, ведущую от +12 в плату. Я просто выпаял первый попутный резистор.
Теперь можно прошивать плату.
Если у вас FTDI адаптер с шестью пинами, то помимо земли, +5 и RX-TX нужно ещё подключить проводок DTR. Тогда не нужно будет тыкать ресет каждый раз при прошивке.
Есть один ускользнувший от внимания момент, который может поставить в тупик новичка, как я.
Если полётный контроллер используется с прошивкой MegaPirateNG, то в OSD модуль нужно загружать прошивку через OSD_Config_Tool. Из единого интерфейса загружается и сама прошивка, и шрифты, и там-же производится вся настройка. Процес прошивки и настройки хорошо описан вот в этом видео.
Если-же полётным контроллером управляет MultiWii, как у меня, то для платы OSD подойдут прошивки KV_Team, или MW OSD.
Собственно, это практически одно и тоже, только MW OSD выглядит более развитой и предоставляющей больше возможностей для настройки.
Опишу пару не очевидных для меня моментов, с которыми я столкнулся.
Первым делом, несмотря на то, что в окне превьюшки у нас всё нормально, нужно загрузить шрифты.
Для этого в разделе FONT TOOLS нужно нажать сначала SELECT и выбрать один из вариантов шрифтов. После выбора шрифт сразу отобразится в превьюшке. Чтобы загрузить его в саму плату нужно там-же нажать UPLOAD. Побежит счётчик. По окончанию шрифты будут загружены.
Следующим обязательным пунктом будет тип видеосигнала. При NTSC у меня изображение не накладывалось вовсе. Выставив PAL всё стало отображаться нормально.
Так-же тут можно настроить местоположение элементов. У меня на мониторе не убралась верхняя строчка с координатами.
Для редактирования нужно нажать LAYOUT EDITOR. Под превьюшкой откроется панелька редактирования. В пункте Text выбираем нужный индикатор и навигационными кнопками двигаем элементы куда нужно.
Не забываем после каждого изменения чего-либо нажимать WRITE для загрузки изменений в саму плату OSD.
Так-же все настройки можно сохранить в файл и прочитать их оттуда кнопками SAVE\LOAD, однако настройка местоположения элементов в файле у меня не сохраняется.
Внизу есть бар SIMULATOR, в котором можно подвигать - покрутить параметры и увидеть, как они будут меняться.
Нажав Simulate on OSD мы отправляем данные в OSD, как-будто она считала их с полётного контроллера и, соответственно, все параметры отобразятся на мониторе.
Ещё одним замечательным отличием прошивок KV_Team и MW OSD является то, что полётный контроллер можно настраивать в поле непосредственно с пульта через OSD.
Я сейчас временно без аппаратуры, так что все эти настройки у меня ещё впереди. Датчик тока, напряжения и RSSI я буду подключать непосредственно к полётному контроллеру, таким образом эти параметры будут отображаться не только в OSD, но и в телеметрии.
Небольшое дополнение.
Т.к. иголки бывших 12 вольт питания аналоговой части у нас остались не у дел, я, как и планировал, использовал их как перемычку для подключения питания камеры.
А раз уж у нас так близко к OSD подходит питание от видео батареи, почему-бы нам не завести его в само OSD.
Итак, собрал делитель напряжения на двух резисторах.
Номиналы не помню, но разница около двух раз. Что-то около 100 и 50 килоом. На 100 и 50 ом сильно грелись.
В любом случае надо подобрать так, чтобы при подаче 13 вольт на сигнальном хвосте было не больше 5 вольт.
Даже если будет максимум 2 - нас это устроит.
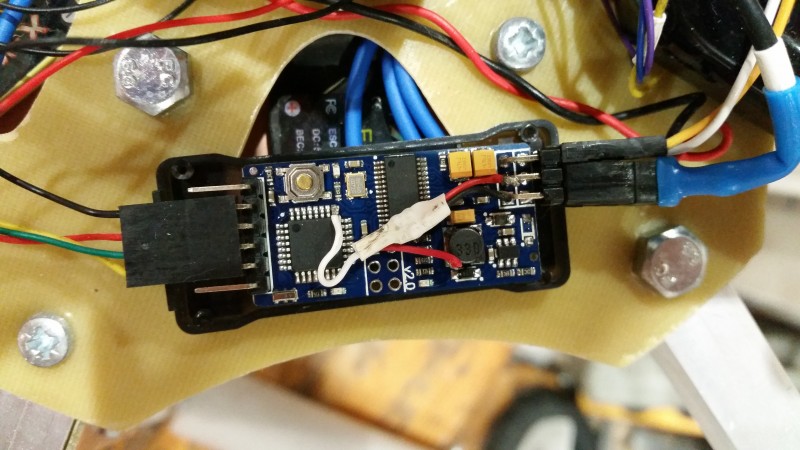
Запаял сигнальный провод к ноге Меги и вуаля.
У нас напряжение видеосистемы.
Осталось чтолько через меню самой OSD в соответствующем разделе подобрать множитель так, чтобы отбражаемое напряжение соответствовало реальному.
Comments
Я сколхозил радиатор на MAX-чип, чтобы уменьшить вероятность сгорания. Покажу фотку потом.
Я сколхозил радиатор на MAX-чип, чтобы уменьшить вероятность сгорания. Покажу фотку потом.
Мне кажется, что MAX сгорает не напрямую от перегрева, а всё-же из-за каких-то косяков (с питанием?).
Здравствуйте Евгений! Не могли бы вы подсказать, как решить проблему с моей ОСД. Проблема в том, что на экране не все символы отображаются верно и присутствуют лишние черточки. Это не зависит от прошивки (заливал разные - все равно есть лишние и неправильные символы). Вот тут скрин rcopen.com/forum/f90/topic404965/31
Подозрения на неправильные шрифты. Но больше никакие шрифты (пробовал из разных версий программ) не записываются. Пишет Ошибку - No data. Есть ли способ очистить память по новой загрузить эти шрифты?
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"4610bfa43df9550077785381":{"_id":"4610bfa43df9550077785381","hid":21898,"name":"Amper_86","nick":"Amper_86","avatar_id":null,"css":""},"4ff8f84e3df9550077742654":{"_id":"4ff8f84e3df9550077742654","hid":122080,"name":"BigWheeelS","nick":"BigWheeelS","avatar_id":null,"css":""},"529c7f7b3df955007772f3c4":{"_id":"529c7f7b3df955007772f3c4","hid":187331,"name":"Saradon","nick":"Saradon","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"5652da5f9970730077113af8","hid":21066,"title":"Как я побеждал minimOSD/Mavlink OSD.","html":"<p>Данная статья не будет интересна специалистам, или просто разбирающимся людям, но, возможно, она хоть чуть-чуть упростит решение вопроса таким-же как я новичкам, которым впервые в руки попала эта OSDшка и на которых свалилась куча иногда противоречивой информации с сайтов на разных языках.<br>\nИз всех полётных контроллеров серии “сделай сам” я решил остановиться на AIOP, как на самом, как мне кажется, продвинутом.<br>\nНу и, разумеется, если уж на аппарате есть видео - хочется и OSD.<br>\nСамым простым и самым доступным на сегодня способом организации OSD является MinimOSD, или MavlinkOSD, что, по сути, одно и то-же. Ревизий и внешних видов этих плат - огромное количество, но форм-фактор и принципы одни. Сегодня существует ещё одна плата, построенная на том-же принципе - Micro MinimOSD. В ней уже доработано питание, выведены необходимые разъёмы на измерение напряжения бортовой сети, видеосистемы, разъём датчика тока и разъём для измерения RSSI.<br>\nОднако я-же стал “счастливым” обладателем именно Mavlink OSD. Основной проблемой этого девайса является частое сгорание микросхемы MAX7456, которая, собственно, и отвечает за наложение информации на видео.<br>\nВ этой плате питание цифровой части, на которой расположен процессор ATmega, отвечающий за обработку данных с полётного контроллера и питание аналоговой части, от которой питается вышеозначенный MAX разделены.<br><!--cut</p>-->\n\nДело в том, что любой преобразователь питания даёт помехи на аналоговый видеосигнал. При использовании качественных преобразователей этот (д)эффект может стремится к нулю, но в некоторых случаях он может весьма заметно мешать жить. Для этого цифровая часть платы питается от самого полётного контроллера, который в свою очередь питается от BEC-а, а на аналоговую положено подавать 7-12 вольт от отдельной батареи, питающей камеру и видеопередатчик.<br>\nОднако, везде настоятельно рекомендуют объединять питание обеих частей. Теоретически, так реже сгорает MAX, а практически, у нас меньше проводов. Для объединения питания нужно запаять землю и плюс. Землю проще всего запаять зачистив два небольших пятачка на задней части платы и спать перемычку между ними.<br>\n<a href=\"http://fastpic.ru/view/74/2015/1123/_c5affa8de3f33b723188dc801cb8e06c.jpg.html\" class=\"link link-ext\" data-nd-link-orig=\"http://fastpic.ru/view/74/2015/1123/_c5affa8de3f33b723188dc801cb8e06c.jpg.html\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 400px\" data-nd-image-orig=\"http://i74.fastpic.ru/thumb/2015/1123/6c/_c5affa8de3f33b723188dc801cb8e06c.jpeg\"><img src=\"http://i74.fastpic.ru/thumb/2015/1123/6c/_c5affa8de3f33b723188dc801cb8e06c.jpeg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2500%\"></span></span></a><br>\nТак-же сзади удобнее припаять проводок к +5 цифровой части и вывести его через отверстие на наружную сторону платы.<br>\nВторой конец положительного провода нужно припаять к одному из хвостов дросселя. В разных ревизиях плат этот хвост может быть с разной стороны. Проще всего отследить дорожку от “+” аналоговой части до дросселя и припаять провод к противоположному хвосту.<br>\n<a href=\"http://fastpic.ru/view/74/2015/1123/_bb14628cd80805e02b98c3ddaa91170d.jpg.html\" class=\"link link-ext\" data-nd-link-orig=\"http://fastpic.ru/view/74/2015/1123/_bb14628cd80805e02b98c3ddaa91170d.jpg.html\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 400px\" data-nd-image-orig=\"http://i74.fastpic.ru/thumb/2015/1123/0d/_bb14628cd80805e02b98c3ddaa91170d.jpeg\"><img src=\"http://i74.fastpic.ru/thumb/2015/1123/0d/_bb14628cd80805e02b98c3ddaa91170d.jpeg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2500%\"></span></span></a><br>\nЧтобы случайно по забывчивости не подать на плату 12 вольт, и чтобы оставшиеся неудел иголки можно было использовать как перемычку, рекомендуется прорезать дорожку, ведущую от +12 в плату. Я просто выпаял первый попутный резистор.<br>\nТеперь можно прошивать плату.<br>\nЕсли у вас FTDI адаптер с шестью пинами, то помимо земли, +5 и RX-TX нужно ещё подключить проводок DTR. Тогда не нужно будет тыкать ресет каждый раз при прошивке.<br>\nЕсть один ускользнувший от внимания момент, который может поставить в тупик новичка, как я.<br>\nЕсли полётный контроллер используется с прошивкой MegaPirateNG, то в OSD модуль нужно загружать прошивку через <a href=\"https://code.google.com/p/arducam-osd/wiki/OSD_Config_Tool\" class=\"link link-ext\" data-nd-link-orig=\"https://code.google.com/p/arducam-osd/wiki/OSD_Config_Tool\" target=\"_blank\" rel=\"nofollow noopener\">OSD_Config_Tool</a>. Из единого интерфейса загружается и сама прошивка, и шрифты, и там-же производится вся настройка. Процес прошивки и настройки хорошо описан <a href=\"http://www.youtube.com/watch?v=jiDkKv0iC4k\" class=\"link link-ext\" data-nd-link-orig=\"http://www.youtube.com/watch?v=jiDkKv0iC4k\" target=\"_blank\" rel=\"nofollow noopener\">вот в этом видео</a>.<br>\nЕсли-же полётным контроллером управляет MultiWii, как у меня, то для платы OSD подойдут прошивки <a href=\"https://code.google.com/p/rush-osd-development/\" class=\"link link-ext\" data-nd-link-orig=\"https://code.google.com/p/rush-osd-development/\" target=\"_blank\" rel=\"nofollow noopener\">KV_Team</a>, или <a href=\"http://www.mwosd.com/\" class=\"link link-ext\" data-nd-link-orig=\"http://www.mwosd.com/\" target=\"_blank\" rel=\"nofollow noopener\">MW OSD</a>.<br>\nСобственно, это практически одно и тоже, только MW OSD выглядит более развитой и предоставляющей больше возможностей для настройки.<br>\n<a href=\"http://fastpic.ru/view/76/2015/1123/5cf5f312134d255c27605c07464bd64e.jpg.html\" class=\"link link-ext\" data-nd-link-orig=\"http://fastpic.ru/view/76/2015/1123/5cf5f312134d255c27605c07464bd64e.jpg.html\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 400px\" data-nd-image-orig=\"http://i76.fastpic.ru/thumb/2015/1123/4e/5cf5f312134d255c27605c07464bd64e.jpeg\"><img src=\"http://i76.fastpic.ru/thumb/2015/1123/4e/5cf5f312134d255c27605c07464bd64e.jpeg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 49.5000%\"></span></span></a><br>\nОпишу пару не очевидных для меня моментов, с которыми я столкнулся.<br>\nПервым делом, несмотря на то, что в окне превьюшки у нас всё нормально, нужно загрузить шрифты.<br>\nДля этого в разделе FONT TOOLS нужно нажать сначала SELECT и выбрать один из вариантов шрифтов. После выбора шрифт сразу отобразится в превьюшке. Чтобы загрузить его в саму плату нужно там-же нажать UPLOAD. Побежит счётчик. По окончанию шрифты будут загружены.<br>\nСледующим обязательным пунктом будет тип видеосигнала. При NTSC у меня изображение не накладывалось вовсе. Выставив PAL всё стало отображаться нормально.<br>\nТак-же тут можно настроить местоположение элементов. У меня на мониторе не убралась верхняя строчка с координатами.<br>\nДля редактирования нужно нажать LAYOUT EDITOR. Под превьюшкой откроется панелька редактирования. В пункте Text выбираем нужный индикатор и навигационными кнопками двигаем элементы куда нужно.<br>\nНе забываем после каждого изменения чего-либо нажимать WRITE для загрузки изменений в саму плату OSD.<br>\nТак-же все настройки можно сохранить в файл и прочитать их оттуда кнопками SAVE\\LOAD, однако настройка местоположения элементов в файле у меня не сохраняется.<br>\nВнизу есть бар SIMULATOR, в котором можно подвигать - покрутить параметры и увидеть, как они будут меняться.<br>\nНажав Simulate on OSD мы отправляем данные в OSD, как-будто она считала их с полётного контроллера и, соответственно, все параметры отобразятся на мониторе.<br>\n<a href=\"http://fastpic.ru/view/74/2015/1123/_a9593118d60e9681eb46d97781f287c8.jpg.html\" class=\"link link-ext\" data-nd-link-orig=\"http://fastpic.ru/view/74/2015/1123/_a9593118d60e9681eb46d97781f287c8.jpg.html\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 400px\" data-nd-image-orig=\"http://i74.fastpic.ru/thumb/2015/1123/c8/_a9593118d60e9681eb46d97781f287c8.jpeg\"><img src=\"http://i74.fastpic.ru/thumb/2015/1123/c8/_a9593118d60e9681eb46d97781f287c8.jpeg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2500%\"></span></span></a><br>\nЕщё одним замечательным отличием прошивок KV_Team и MW OSD является то, что полётный контроллер можно настраивать в поле непосредственно с пульта через OSD.<br>\nЯ сейчас временно без аппаратуры, так что все эти настройки у меня ещё впереди. Датчик тока, напряжения и RSSI я буду подключать непосредственно к полётному контроллеру, таким образом эти параметры будут отображаться не только в OSD, но и в телеметрии.</p>\n<p>Небольшое дополнение.<br>\nТ.к. иголки бывших 12 вольт питания аналоговой части у нас остались не у дел, я, как и планировал, использовал их как перемычку для подключения питания камеры.<br>\nА раз уж у нас так близко к OSD подходит питание от видео батареи, почему-бы нам не завести его в само OSD.<br>\nИтак, собрал делитель напряжения на двух резисторах.<br>\n<span class=\"image\" style=\"width: 200px\" data-nd-image-orig=\"http://images.vfl.ru/ii/1433757342/46ba9e6e/8972722_m.png\"><img src=\"http://images.vfl.ru/ii/1433757342/46ba9e6e/8972722_m.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 118.0000%\"></span></span><br>\nНоминалы не помню, но разница около двух раз. Что-то около 100 и 50 килоом. На 100 и 50 ом сильно грелись.<br>\nВ любом случае надо подобрать так, чтобы при подаче 13 вольт на сигнальном хвосте было не больше 5 вольт.<br>\nДаже если будет максимум 2 - нас это устроит.<br>\nЗапаял сигнальный провод к ноге Меги и вуаля.<br>\nУ нас напряжение видеосистемы.<br>\nОсталось чтолько через меню самой OSD в соответствующем разделе подобрать множитель так, чтобы отбражаемое напряжение соответствовало реальному.<br>\n<span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"http://i76.fastpic.ru/big/2016/0312/b5/c98a89de12cedc567c90515237ae54b5.jpg\"><img src=\"http://i76.fastpic.ru/big/2016/0312/b5/c98a89de12cedc567c90515237ae54b5.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.2500%\"></span></span></p>\n","user":"529c7f7b3df955007772f3c4","ts":"2015-11-23T09:20:31.000Z","st":1,"cache":{"comment_count":3,"last_comment":"569947ce997073007712816b","last_comment_hid":3,"last_ts":"2016-01-15T19:26:06.000Z","last_user":"4610bfa43df9550077785381"},"views":4951,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}