4. Что ломается.
Вертолет, как и все Блэйды, является супер-крашеустойчивым. Однако, как известно, сломать можно все. Что ломается, в порядке убывания вероятности? 4.1. Задний шарик на тарелке перекоса.
Его серва, в отличие от остальных, имеет прямую тягу, которая не пружинит при краше.
Распространен метод ремонта, при котором взамен сломанного шарика приклеивается фрагмент с шариком держателя лопасти от mSR.
Соединение можно укрепить нитью, говорят конструкция получатся настолько прочной, что переживает подшипник в тарелке перекоса.
Встречалось решение с установкой изогнутой задней тягой, которая в отличии от прямой пружинит при краше.
Также рулит замена тарелки на Microheli. 4.2. Ломается хвостовая балка.
Очень много нареканий на качество карбоновой трубки хвостовой балки. Многие меняют ее на монолитный пруток аналогичного диаметра (2мм) и размера. Провода пускают сверху по улице, некоторые одевают сверху термоусадочную трубку для защиты проводки. 4.3. В остальном примерно в равной вероятности встречаются:
расщепление основного вала, зачастую решаемое проклейкой циакрином
выход из строя подшипников держателей лопастей и тарелки перекоса
выход из строя основного и хвостового мотора
гнется межосевой вал ОР
ломаются зубья основной шестерни
рассыпается подшипник вала сервы. 4.4. Грузик дополнительных лопастей вылетает.
В комплекте кладут лопасти с дополнительными грузами. Они обеспечивают более плавный полет. Оказалось, что внутри пластмассовых выступов имеется металлический груз, который при краше может вылететь. В результате одна лопасть становится тяжелее другой, и ротор начинает трясти от дисбаланса.
5. Жалобы, пожелания.
**5.1. Основные жалобы по конструкции, ** кроме конечно описанных поломок, связаны со слабой мощностью моторов. Этот факт не позволяет выполнить полный комплекс 3D фигур и часто приводит к сворачиванию хвоста при 3D пилотировании.
Для увеличения эффективности хвостового ротора многие удлиняют балку на 15-30мм.
Встречаются также предложения по увеличению шага ХР простым загибанием лопастей. По основному мотору единственным эффективным решением является замена на brushless.
6. Опции и улучшения. 6.1. Аккумуляторы.
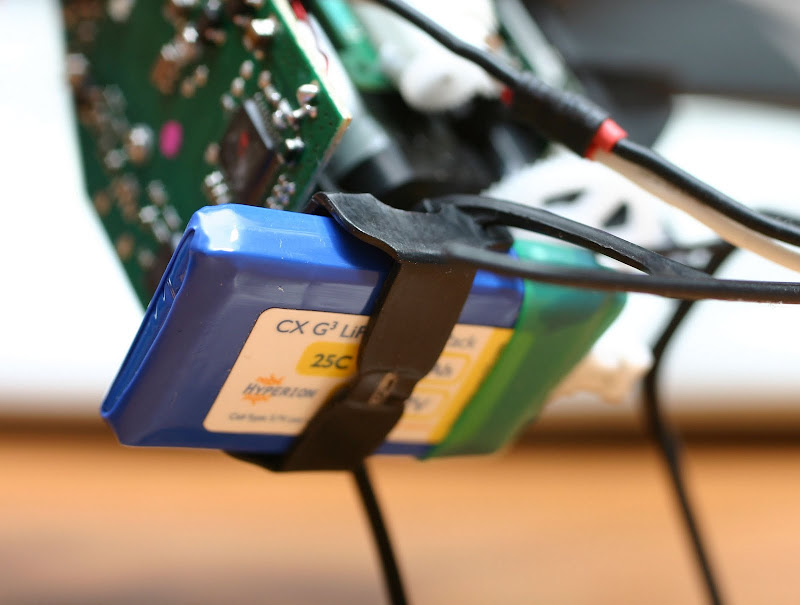
Стоковые аккумуляторы обеспечивают стабильный полет до 3-4 минут. Многие хвалят Hyperion G3, 240mAh 25C/45C. Эти аккумуляторы поставляются с разъемами как у mSR и требуют переходника/перепайки разъема на вертолете или на акке. По размеру они шире стоковых и не влезают в стандартные лыжики. Можно купить специальные лыжи или модифицировать стандартные. Некоторые разрезают контейнер. Можно под горячим воздухом растянуть стандартное крепление.
Hobbyking недавно предложил аккумуляторы со стандартным для mCPx разъемами и размерами nano-tech 300 mAh 35C. Народ очень хвалит.
Можно также установить параллельно два аккумулятора от mSR. Я пробовал пару 160 mAh nano-tech. Летает очень бодро до 6 минут.
Встречаются утверждения, что и на одном 160 mAh nano-tech вполне нормальный полет и разумное время. 6.2. Разъемы основного и хвостового моторов на плате управления.
Конструктивно не имеют фиксатора поэтому могут разбалтываться, отходить, иметь плохой контакт. При этом моторы не развивают номинальную мощность. Радикальным решением является устранение разъемов с припайкой проводов от моторов напрямую к плате. В последних поставках разъемы зафиксированы клеем. Можно дополнительно прихватить термоклеем.
6.3. Нестандартные настройки полетных режимов 6.3.1. Существует мнение про то, что режим Normal не особенно нужен (особенно на dx6i, где полетных режима всего 2 + throttle hold). Соответственно, можно в нормал забить настройки для айдла с полными расходами, но большими экспонентами. А в айдл забить ровно то же самое, но с экспонентами поменьше. При этом последовательность действий такая:
a) Перед включением питания верта - включаем режим Hold
b) Когда верт включен, проверена работа серв и все готово к взлету - проверяем, что стик газа стоит в слегка отрицательной зоне (ну, условно, на одну риску вниз от центрального положения), отключаем режим Hold.
c) Ждем секунд 5 пока моторчик раскрутится, заодно смотрим - не колбасит ли верт. Взлетаем.
d) Для посадки зависаем над пригодной для посадки поверхностью и щелкаем Hold. Верт плавно садится. 6.3.2. На хелифрике была информация, что если снизить скорость вращения ОР со 100% до, скажем, 90%, то моторчику хвостового ротора становится легче на тяжелых маневрах и частично решается проблема срыва хвоста.
7. Советы по пилотированию.
Основным конструктивным отличием, скажем, от mSR является коллективный шаг (collective pitch) основного ротора. Дополнительно вертолет имеет интегрированную безфлайбарную систему (Integrated flybarless unit), которая основана на трех-осевом гироскопе непосредственно на плате управления. В результате вертолет не имеет флайбара и имеет характерные полетные повадки.
Для новичков будет полезно понять главное, в остальном это просто маленький настоящий вертолет с коллективным шагом. Информации про пилотирование - море! А главное - вот что… 7.1. Используйте симулятор.
Управление вертолетом с коллективным шагом принципиально отличается от mSR и mCX тем что вертолет не выравнивается сам в горизонт после отпускания (установки по центру) правого стика (mode 2 - элероны - руль высоты). Поэтому если вы наклонили вертолет вперед для горизонтального полета, он сам никогда не остановится если отпустить стик, и его надо остановить, наклонив стик назад, устраняя тем самым продольный крен. Аналогичная ситуация с управлением боковым креном. Для тех кто ранее летал на mSR полезно напомнить что там в логику платы управления зашит небольшой миксер канала рудера (руль направления на левом стике) и крена (элероны на правом стике). Как результат на небольшой скорости mSR поворачивает сам, немного наклоняясь внутрь поворота. На mCPx такой халявы нет. Это я все пишу к тому что если у вас не было опыта полета на коллективном шаге вживую или на симуляторе, настоятельно рекомендуется попробовать полетать на симуляторе, к примеру, на большом, стабильном тяжелом вертолете типа Raptor. Если вы не можете контролировать вертолет, возвращать его назад, поворачивать в разные стороны - краши на mCPx вам обеспечены. Он конечно практически не убиваемый и многие осваивают все вживую не пользуясь симуляторами, снова и снова вонзая чертенка в планету, деревья, стены, столбы… Значительная прочность за счет легкого веса и отличает mCPx от всех остальных вертолетов, делая его идеальным для новичков. Но выбор за вами. 7.2. Поймите особенность поведения flybarless.
Многие заблуждаются и считают flybarless автопилотом. Электроника flybarless не является автопилотом, автовыравниванием или чем-то в этом роде. Основная ее цель - удержать вертолет в фиксированном положении в пространстве при отсутствии управляющих воздействий. Ну если на пальцах объяснять, вист например, вертолет ровно, параллельно земле, вы двигаете правый стик от себя. Вертолет получает команду “надо наклоняться вперед”. Чем сильнее двинули стик - тем быстрее должен наклоняться вертолет. Электроника имеет свое внутреннее понятие о быстроте наклона в зависимости от отклонения стика на пульте и начинает двигать соответствующей сервой, проверяя умным гироскопом достигнута ли нужная скорость наклона (по умному угловая скорость вращения в нужной плоскости). Если не достигнута - двигает еще сервой и т.д. Если вы отпустили стик, то вращение в соответствующей плоскости должно быть остановлено и электроника будет стараться удерживать его в этом наклоненном положении. Обратите внимание, не выравнивать в горизонтальное, а удерживать в некотором наклоненном положении. Такая логика работы имеет два основных практических последствия для новичков. Первое - это то что если при взлете пытаться подруливать или ползать по земле, у электроники может съехать “ноль”. Т.е. вы даете команду “наклонись влево”, а вертолет из-за того что стоит на земле наклониться не может. Электроника начинает давить сервой - верт на месте, гироскоп чувствует что наклона нет, давит еще, потом вы прибавляете газ и взлетаете, а серва по крену уже почти по-максимуму старается завалить вертолет на бок. В результате он моментально валится на бок, пискнуть не успеете. Правильно взлетать уверенно и быстро, стараясь максимально быстро освободиться от опоры на землю чтобы электроника получила свободу управления. Дополнительно, если у вас возникло желание сесть и сразу опять взлететь и продолжить полет рекомендуется передернуть питание перед взлетом. В момент посадки также могут съехать нули. Второе - это внешние факторы, такие как ветер, которые электроника старается компенсировать. Стремление сохранить положение в пространстве (текущие наклоны относительно горизонта) приводит к тому что при неровном, порывистом ветре вертолет с одной стороны будет стараться компенсировать воздействие ветра, но, с другой стороны, его будет бросать по высоте. Поэтому если вы летаете в ветер, будьте готовы к тому что вертолет может вжать в землю при усилении ветра, или подбросить вверх. При этом можно вполне получить расколбас по высоте на 1-2 метра.
Comments
Отличный обзор получился! Возможно, стоит добавить идею про то, что режим Normal не особенно нужен (особенно на dx6i, где полетных режима всего 2 + throttle hold). Соответственно, можно в нормал забить настройки для айдла с полными расходами, но большими экспонентами. А в айдл забить ровно то же самое, но с экспонентами поменьше. Эта идея в тексте поразумевается, но не изложена в явном виде: может, людям, которые впервые сталкиваются с настройками для CP будет проще.
Еще один момент по настройке передатчика. На хелифрике народ пишет, что если снизить скорость вращения ОР со 100% до, скажем, 90%, то моторчику ХР становится легче на тяжелых маневрах и частично решается проблема срыва хвоста. Я попробовал - вроде бы и правда лучше стало.
Хороший обзор! Стоит еще добавить, что заметно увеличить мощность стокового мотора ОР и ХР, а также избавится от тряски хвоста можно подпайкой проводов напрямую к плате 3в1. Мне помогло!
Возможно, стоит добавить идею про то, что режим Normal не особенно нужен (особенно на dx6i, где полетных режима всего 2 + throttle hold).
Как я в свое время для себя уяснил режим Normal, его главная суть состоит в том что стиком газа можно остановить ротор. Т.е. в положении “полностью к себе” значение кривой газа равно нулю. Это позволяет спокойно раскрутить ротор на земле и после посадки остановить его стиком газа. Также те, кто привык на mSR летать блинчиком одновременно привыкают убирать газ перед крашем. В режиме Айдл, как правило, кривая газа строится таким образом, что в любом положении стика газа обороты ротора близки к максимальным, а управление тягой происходит за счет шага лопастей и для остановки ротора можно только дернуть Hold. Соответственно стандартный путь это - включаем Normal, взлетаем, летаем блинчиком. Если что - убираем стик газа. Стараемся вместо убирания газа дергать холд. Когда привыкли - взлетаем в нормал, переключаем в айдл, летаем. Газом ротор уже не успокоить, только холд. Перед посадкой включаем нормал и садимся. Убираем газ - ротор останавливается.
Ваш совет скорее продвинутым пилотам чем новичкам, добавлю как фичу. Спасибо за отзыв!!!
Стоит еще добавить, что заметно увеличить мощность стокового мотора ОР и ХР, а также избавится от тряски хвоста можно подпайкой проводов напрямую к плате 3в1. Мне помогло!
Спасибо за отзыв! Добавил. Если можно, пришлите фотку на todmitry@mail.ru, вставлю как иллюстрацию.
Я с самого начала Normal не использовал. На всякий случай - процесс взлета и посадки на Idle:
Перед включением питания верта - щелкаем TH
Когда верт включен, проверена работа серв и все готово к взлету - проверяем, что стик коллектива стоит в слегка отрицательной зоне (ну, условно, на одну риску вниз от центрального положения), отщелкиваем TH.
Ждем секунд 5 пока моторчик раскрутится, заодно смотрим - не колбасит ли верт. Взлетаем.
Для посадки зависаем над пригодной для посадки поверхностью и щелкаем TH. Верт плавно садится.
Еще одной частой поломкой является расщепление хвостовой балки из-за очевидно плохого качества родного карбона - у меня балка “ушла в минус” при первом же подлете!
Решение - замена на карбоновый пруток 2мм (НЕ трубку) - летает уже несколько десяток полетов и даже не треснул. Правда, провода приходится пускать поверху - желательно прихватить термоусадкой в нескольких местах по длинне балки.
Одновременно с этим можно и решить проблему удлиннения хвостовой балки - оптимальной длинной является 140 мм ИМХО (сток - 125 мм).
Еще одной частой поломкой является расщепление хвостовой балки
Спасибо! Описано в часть1 п.4.2, про удлинение в разделе про моторы п.5.1.
Дополнительно, если у вас возникло желание сесть и сразу опять взлететь и продолжить полет рекомендуется передернуть питание перед взлетом. В момент посадки также могут съехать нули.
Достаточно просто дернуть холд. АП станет в нейтраль. Иногда наблюдается просадка по мощности у свежего аккамулятора, вот тогда передернуть питание помогает, контакт ухудшается от вибрации.
Отличная работа, кстати, и очень нужная. Народ уже давно просил.
Фотки добавились в первом посте, как я понял - очень круто получилось. Огромное Вам спасибо за создание faq.
И теперь чтоб этот фаг не затерялся, поместить его надо бы в первое сообщение темы! А для этого надо написать модераторам.
Нормальный фак. Качественно и кратко. Молодец!
Можно добавить про сервы (чистка, подгибание контактов) и смазка моторов (свист на подшипниках).
Спасибо, думаю многим поможет ваша работа.
Спасибо за составление мануала, присоединяюсь к пожеланию разместить ссылку на faq в начале темы. Правда один минус, при этом сама тема превратится в курилку фанов mcpx. Хотя ничего плохого в этом не вижу, сам докурил тему до 80 страницы думаю продолжать.
Супер!! Спасибо автору и добавляющим разную реально полезную инфу форумчанам! Мне, как начинающему по MCP X, очень полезнаю статья. На некоторые свои вопросы сразу нашел ответы, это реально полезно. На днях займусь конструктором 😃.
Приветствую! Спасибо за отзывы о статье. Давно это было 😃 К сожалению я сейчас не экспериментирую с этим вертолетом, так летаю иногда летом по выходным в комплектации, близкой к штатной. Хвосты стандартные, ломаются - меняю.
…
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"486745843df95500777798a0":{"_id":"486745843df95500777798a0","hid":35959,"name":"sashok17","nick":"sashok17","avatar_id":null,"css":""},"4a1b81643df955007776db5e":{"_id":"4a1b81643df955007776db5e","hid":48713,"name":"=DmitryR=","nick":"=DmitryR=","avatar_id":null,"css":""},"4b915eb13df9550077763931":{"_id":"4b915eb13df9550077763931","hid":62283,"name":"AABBCC","nick":"AABBCC","avatar_id":null,"css":""},"4cde5d953df9550077759fb2":{"_id":"4cde5d953df9550077759fb2","hid":74829,"name":"AstraTangens","nick":"AstraTangens","avatar_id":null,"css":""},"4d03dd7d3df9550077758d8a":{"_id":"4d03dd7d3df9550077758d8a","hid":76296,"name":"ZuP","nick":"ZuP","avatar_id":null,"css":""},"4d90840b3df9550077754404":{"_id":"4d90840b3df9550077754404","hid":84589,"name":"paul310","nick":"paul310","avatar_id":null,"css":""},"4d9bace03df9550077754009":{"_id":"4d9bace03df9550077754009","hid":85207,"name":"Bekish","nick":"Bekish","avatar_id":null,"css":""},"4f25c0193df9550077748ed1":{"_id":"4f25c0193df9550077748ed1","hid":112052,"name":"oldcat","nick":"oldcat","avatar_id":null,"css":""},"56c79ae13df9550077713f40":{"_id":"56c79ae13df9550077713f40","hid":246287,"name":"Name_Name","nick":"Name_Name","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"4e15d800997073007710359e","hid":12128,"title":"Blade mCPx часть 2","html":"<p><strong data-nd-pair-src=\"**\">4. Что ломается.</strong><br>\nВертолет, как и все Блэйды, является супер-крашеустойчивым. Однако, как известно, сломать можно все. Что ломается, в порядке убывания вероятности?<br>\n<strong data-nd-pair-src=\"**\">4.1. Задний шарик на тарелке перекоса.</strong><br>\nЕго серва, в отличие от остальных, имеет прямую тягу, которая не пружинит при краше.<br>\nРаспространен метод ремонта, при котором взамен сломанного шарика приклеивается фрагмент с шариком держателя лопасти от mSR.</p>\n<!--cut-->\n<p><strong data-nd-pair-src=\"**\"><span class=\"image\" style=\"width: 267px\" data-nd-image-orig=\"https://lh4.googleusercontent.com/-4bA1Y0WMA-s/ThWERPXSXeI/AAAAAAAAAKU/6oqlGK9Pxos/s400/09a.jpg\"><img src=\"https://lh4.googleusercontent.com/-4bA1Y0WMA-s/ThWERPXSXeI/AAAAAAAAAKU/6oqlGK9Pxos/s400/09a.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 149.8127%\"></span></span></strong><br>\nСоединение можно укрепить нитью, говорят конструкция получатся настолько прочной, что переживает подшипник в тарелке перекоса.<br>\nВстречалось решение с установкой изогнутой задней тягой, которая в отличии от прямой пружинит при краше.<br>\n<strong data-nd-pair-src=\"**\"><span class=\"image\" style=\"width: 640px\" data-nd-image-orig=\"https://lh5.googleusercontent.com/-z1BeY_K4pRE/ThWES7LcMvI/AAAAAAAAAKY/xoFnwlKLOU4/s800/10.jpg\"><img src=\"https://lh5.googleusercontent.com/-z1BeY_K4pRE/ThWES7LcMvI/AAAAAAAAAKY/xoFnwlKLOU4/s800/10.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.0000%\"></span></span></strong><br>\nТакже рулит замена тарелки на Microheli.<br>\n<strong data-nd-pair-src=\"**\">4.2. Ломается хвостовая балка.</strong><br>\nОчень много нареканий на качество карбоновой трубки хвостовой балки. Многие меняют ее на монолитный пруток аналогичного диаметра (2мм) и размера. Провода пускают сверху по улице, некоторые одевают сверху термоусадочную трубку для защиты проводки.<br>\n<strong data-nd-pair-src=\"**\">4.3. В остальном примерно в равной вероятности встречаются:</strong></p>\n<ul>\n<li>расщепление основного вала, зачастую решаемое проклейкой циакрином</li>\n<li>выход из строя подшипников держателей лопастей и тарелки перекоса</li>\n<li>выход из строя основного и хвостового мотора</li>\n<li>гнется межосевой вал ОР</li>\n<li>ломаются зубья основной шестерни</li>\n<li>рассыпается подшипник вала сервы.<br>\n<strong data-nd-pair-src=\"**\">4.4. Грузик дополнительных лопастей вылетает.</strong><br>\nВ комплекте кладут лопасти с дополнительными грузами. Они обеспечивают более плавный полет. Оказалось, что внутри пластмассовых выступов имеется металлический груз, который при краше может вылететь. В результате одна лопасть становится тяжелее другой, и ротор начинает трясти от дисбаланса.</li>\n</ul>\n<p><strong data-nd-pair-src=\"**\"><span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"https://lh3.googleusercontent.com/-iS5vrdyF2i0/ThdEJDqXvEI/AAAAAAAAALY/41lO-4ScfmY/s800/Lopast.jpg\"><img src=\"https://lh3.googleusercontent.com/-iS5vrdyF2i0/ThdEJDqXvEI/AAAAAAAAALY/41lO-4ScfmY/s800/Lopast.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.5000%\"></span></span>5. Жалобы, пожелания.</strong><br>\n**5.1. Основные жалобы по конструкции, ** кроме конечно описанных поломок, связаны со слабой мощностью моторов. Этот факт не позволяет выполнить полный комплекс 3D фигур и часто приводит к сворачиванию хвоста при 3D пилотировании.<br>\nДля увеличения эффективности хвостового ротора многие удлиняют балку на 15-30мм.<br>\nВстречаются также предложения по увеличению шага ХР простым загибанием лопастей. По основному мотору единственным эффективным решением является <a href=\"https://rcopen.com/forum/f59/topic239683\" class=\"link link-int\" data-nd-link-orig=\"https://rcopen.com/forum/f59/topic239683\">замена на brushless</a>.</p>\n<p><strong data-nd-pair-src=\"**\">6. Опции и улучшения.</strong><br>\n<strong data-nd-pair-src=\"**\">6.1. Аккумуляторы.</strong><br>\nСтоковые аккумуляторы обеспечивают стабильный полет до 3-4 минут. Многие хвалят Hyperion G3, 240mAh 25C/45C. Эти аккумуляторы поставляются с разъемами как у mSR и требуют переходника/перепайки разъема на вертолете или на акке. По размеру они шире стоковых и не влезают в стандартные лыжики. Можно купить специальные лыжи или модифицировать стандартные. Некоторые разрезают контейнер. Можно под горячим воздухом растянуть стандартное крепление.<br>\n<span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"https://lh4.googleusercontent.com/-hLkfGT_4ER4/ThWEPgsECYI/AAAAAAAAAKQ/A6_o3QvFFvc/s800/09.jpg\"><img src=\"https://lh4.googleusercontent.com/-hLkfGT_4ER4/ThWEPgsECYI/AAAAAAAAAKQ/A6_o3QvFFvc/s800/09.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 74.7500%\"></span></span></p>\n<p><span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"https://lh5.googleusercontent.com/-6utofXCHI78/ThdEB0N6QMI/AAAAAAAAALQ/ejfx8aFZhVU/s800/Hyperion.jpg\"><img src=\"https://lh5.googleusercontent.com/-6utofXCHI78/ThdEB0N6QMI/AAAAAAAAALQ/ejfx8aFZhVU/s800/Hyperion.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 75.6250%\"></span></span><br>\nHobbyking недавно предложил аккумуляторы со стандартным для mCPx разъемами и размерами nano-tech 300 mAh 35C. Народ очень хвалит.</p>\n<p><span class=\"image\" style=\"width: 288px\" data-nd-image-orig=\"https://lh5.googleusercontent.com/-Rf3ilsTWD7o/ThWNL15ovAI/AAAAAAAAAK0/x2eu316n-fw/s288/14.jpg\"><img src=\"https://lh5.googleusercontent.com/-Rf3ilsTWD7o/ThWNL15ovAI/AAAAAAAAAK0/x2eu316n-fw/s288/14.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 73.2639%\"></span></span><br>\nМожно также установить параллельно два аккумулятора от mSR. Я пробовал пару 160 mAh nano-tech. Летает очень бодро до 6 минут.</p>\n<p><span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"https://lh6.googleusercontent.com/-i6E5QgA6N90/ThdERPWGNaI/AAAAAAAAALg/oLy2FPR3Yno/s800/Nanotech160_1.jpg\"><img src=\"https://lh6.googleusercontent.com/-i6E5QgA6N90/ThdERPWGNaI/AAAAAAAAALg/oLy2FPR3Yno/s800/Nanotech160_1.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 88.0000%\"></span></span><br>\nВстречаются утверждения, что и на одном 160 mAh nano-tech вполне нормальный полет и разумное время.<br>\n<strong data-nd-pair-src=\"**\">6.2. Разъемы основного и хвостового моторов на плате управления.</strong><br>\nКонструктивно не имеют фиксатора поэтому могут разбалтываться, отходить, иметь плохой контакт. При этом моторы не развивают номинальную мощность. Радикальным решением является устранение разъемов с припайкой проводов от моторов напрямую к плате. В последних поставках разъемы зафиксированы клеем. Можно дополнительно прихватить термоклеем.</p>\n<p><strong data-nd-pair-src=\"**\"><span class=\"image\" style=\"width: 800px\" data-nd-image-orig=\"https://lh6.googleusercontent.com/-mORe0fl_Jzg/ThdENYFVP6I/AAAAAAAAALc/5pYajDAotHY/s800/Motor_connectors.jpg\"><img src=\"https://lh6.googleusercontent.com/-mORe0fl_Jzg/ThdENYFVP6I/AAAAAAAAALc/5pYajDAotHY/s800/Motor_connectors.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 80.2500%\"></span></span></strong><br>\n<strong data-nd-pair-src=\"**\">6.3. Нестандартные настройки полетных режимов</strong><br>\n<strong data-nd-pair-src=\"**\">6.3.1.</strong> Существует мнение про то, что режим Normal не особенно нужен (особенно на dx6i, где полетных режима всего 2 + throttle hold). Соответственно, можно в нормал забить настройки для айдла с полными расходами, но большими экспонентами. А в айдл забить ровно то же самое, но с экспонентами поменьше. При этом последовательность действий такая:<br>\na) Перед включением питания верта - включаем режим Hold<br>\nb) Когда верт включен, проверена работа серв и все готово к взлету - проверяем, что стик газа стоит в слегка отрицательной зоне (ну, условно, на одну риску вниз от центрального положения), отключаем режим Hold.<br>\nc) Ждем секунд 5 пока моторчик раскрутится, заодно смотрим - не колбасит ли верт. Взлетаем.<br>\nd) Для посадки зависаем над пригодной для посадки поверхностью и щелкаем Hold. Верт плавно садится.<br>\n<strong data-nd-pair-src=\"**\">6.3.2.</strong> На хелифрике была информация, что если снизить скорость вращения ОР со 100% до, скажем, 90%, то моторчику хвостового ротора становится легче на тяжелых маневрах и частично решается проблема срыва хвоста.</p>\n<p><strong data-nd-pair-src=\"**\">7. Советы по пилотированию.</strong><br>\nОсновным конструктивным отличием, скажем, от mSR является коллективный шаг (collective pitch) основного ротора. Дополнительно вертолет имеет интегрированную безфлайбарную систему (Integrated flybarless unit), которая основана на трех-осевом гироскопе непосредственно на плате управления. В результате вертолет не имеет флайбара и имеет характерные полетные повадки.<br>\nДля новичков будет полезно понять главное, в остальном это просто маленький настоящий вертолет с коллективным шагом. Информации про пилотирование - море! А главное - вот что…<br>\n<strong data-nd-pair-src=\"**\">7.1. Используйте симулятор.</strong><br>\nУправление вертолетом с коллективным шагом принципиально отличается от mSR и mCX тем что вертолет не выравнивается сам в горизонт после отпускания (установки по центру) правого стика (mode 2 - элероны - руль высоты). Поэтому если вы наклонили вертолет вперед для горизонтального полета, он сам никогда не остановится если отпустить стик, и его надо остановить, наклонив стик назад, устраняя тем самым продольный крен. Аналогичная ситуация с управлением боковым креном. Для тех кто ранее летал на mSR полезно напомнить что там в логику платы управления зашит небольшой миксер канала рудера (руль направления на левом стике) и крена (элероны на правом стике). Как результат на небольшой скорости mSR поворачивает сам, немного наклоняясь внутрь поворота. На mCPx такой халявы нет. Это я все пишу к тому что если у вас не было опыта полета на коллективном шаге вживую или на симуляторе, настоятельно рекомендуется попробовать полетать на симуляторе, к примеру, на большом, стабильном тяжелом вертолете типа Raptor. Если вы не можете контролировать вертолет, возвращать его назад, поворачивать в разные стороны - краши на mCPx вам обеспечены. Он конечно практически не убиваемый и многие осваивают все вживую не пользуясь симуляторами, снова и снова вонзая чертенка в планету, деревья, стены, столбы… Значительная прочность за счет легкого веса и отличает mCPx от всех остальных вертолетов, делая его идеальным для новичков. Но выбор за вами.<br>\n<strong data-nd-pair-src=\"**\">7.2. Поймите особенность поведения flybarless.</strong><br>\nМногие заблуждаются и считают flybarless автопилотом. Электроника flybarless не является автопилотом, автовыравниванием или чем-то в этом роде. Основная ее цель - удержать вертолет в фиксированном положении в пространстве при отсутствии управляющих воздействий. Ну если на пальцах объяснять, вист например, вертолет ровно, параллельно земле, вы двигаете правый стик от себя. Вертолет получает команду “надо наклоняться вперед”. Чем сильнее двинули стик - тем быстрее должен наклоняться вертолет. Электроника имеет свое внутреннее понятие о быстроте наклона в зависимости от отклонения стика на пульте и начинает двигать соответствующей сервой, проверяя умным гироскопом достигнута ли нужная скорость наклона (по умному угловая скорость вращения в нужной плоскости). Если не достигнута - двигает еще сервой и т.д. Если вы отпустили стик, то вращение в соответствующей плоскости должно быть остановлено и электроника будет стараться удерживать его в этом наклоненном положении. Обратите внимание, не выравнивать в горизонтальное, а удерживать в некотором наклоненном положении. Такая логика работы имеет два основных практических последствия для новичков.<br>\n<strong data-nd-pair-src=\"**\">Первое</strong> - это то что если при взлете пытаться подруливать или ползать по земле, у электроники может съехать “ноль”. Т.е. вы даете команду “наклонись влево”, а вертолет из-за того что стоит на земле наклониться не может. Электроника начинает давить сервой - верт на месте, гироскоп чувствует что наклона нет, давит еще, потом вы прибавляете газ и взлетаете, а серва по крену уже почти по-максимуму старается завалить вертолет на бок. В результате он моментально валится на бок, пискнуть не успеете. Правильно взлетать уверенно и быстро, стараясь максимально быстро освободиться от опоры на землю чтобы электроника получила свободу управления. Дополнительно, если у вас возникло желание сесть и сразу опять взлететь и продолжить полет рекомендуется передернуть питание перед взлетом. В момент посадки также могут съехать нули.<br>\n<strong data-nd-pair-src=\"**\">Второе</strong> - это внешние факторы, такие как ветер, которые электроника старается компенсировать. Стремление сохранить положение в пространстве (текущие наклоны относительно горизонта) приводит к тому что при неровном, порывистом ветре вертолет с одной стороны будет стараться компенсировать воздействие ветра, но, с другой стороны, его будет бросать по высоте. Поэтому если вы летаете в ветер, будьте готовы к тому что вертолет может вжать в землю при усилении ветра, или подбросить вверх. При этом можно вполне получить расколбас по высоте на 1-2 метра.</p>\n","user":"4a1b81643df955007776db5e","ts":"2011-07-07T16:00:00.000Z","st":1,"cache":{"comment_count":16,"last_comment":"56d9584d997073007716363b","last_comment_hid":16,"last_ts":"2016-03-04T09:41:33.000Z","last_user":"56c79ae13df9550077713f40"},"views":6538,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}


 5. Жалобы, пожелания.
5. Жалобы, пожелания.