А таки победить удалось. Итак:
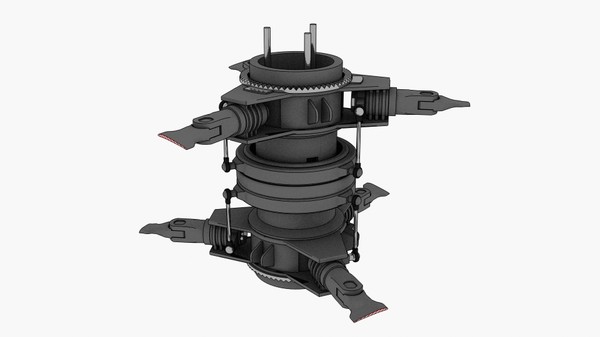
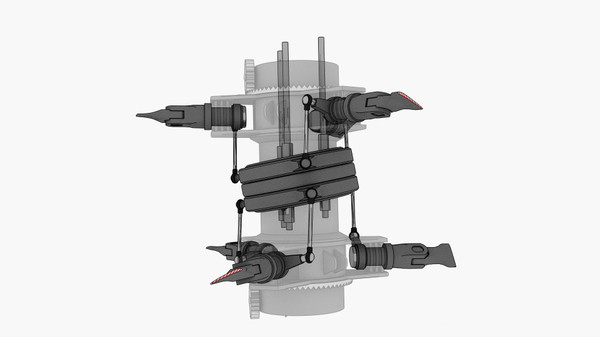
Основная проблема с механикой CL-227 была в автомате перекоса. Верней - понимании как удалось передать все усилия на оба ротора. Все оказалось достаточно просто:
Два кольца автомата (на верхний и нижний ротор) находятся на подвижном кольце, которое управляется тягами идущими через центральный вал. Сами тяги - уже на сервоприводы. В той же роторной колонке идут и валы от двух двигателей.
Чего не показано: тяги, которые должны передавать вращение с ротора на кольца автоматов перекоса. Фиксаторы на роторах есть, а на кольцах - еще нет.
В идеале - двигатели убраны внутрь роторной колонки.
Собственно осталось все это сделать в едином масштабе, добавить двигатели, серво, аккумулятор… исправить ошибки… и попробовать найти токаря.
Взлетит или нет… вот в чем вопрос.
Comments
ооо!!! буду следить интересно!
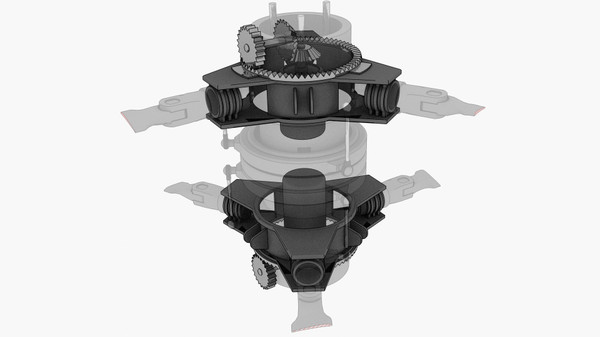
я так понимаю, что шестереночка передает вращающий момент на коронку?
так вот - шестереночка и коронка очень хилые.
расчет зубчатых колес - это на уровне лабораторной работы, или короче говоря вопрос одного часа.
зная мощьность и обороты, поститайте…
я так понимаю, что шестереночка передает вращающий момент на коронку?
так вот - шестереночка и коронка очень хилые.
расчет зубчатых колес - это на уровне лабораторной работы, или короче говоря вопрос одного часа.
зная мощьность и обороты, поститайте…
ну, то что хилые - ежу понятно. я их вообще рисовал от балды для своего общего понимания передачи вращения. тут вообще выходит сложность в том, что нужно будет выбрать двигатель, взять его диаметр, прикинуть место под внутренние тяги, получить диаметр центральной колонки, вывести размер звезды ротора… затем прикинуть размеры дисков автоматов… при этом чтобы диаметр этой звезды ротора не вышел за 110мм (а вот это - критично). по прикидкам - диаметр коронки закрепленной на звезде ротора - около 80мм, а это весьма много, следовательно будет сильное падение передачи… к тому же нужно обеспечить скольжение звезды ротора на колонке, что потребует тонкий подшипник. использовать вариант с скользкими прокладками не хочется, подшипник нужного размера будет сложно подобрать. видимо придется решать проблему наборным подшипником (по аналогии с фиксации ствольного блока в АК-630)…
в общем, пробле еще много, и я еще надеюсь это решить хотя бы на уровне чертежей.
не ставте мотор внутри, это излишнее усложнение. а подобрать тонкий подшипник не сложно, но очень дорого.
по опыту проектирования различных устройств я знаю одно: проблемма не решенная в самом начале, становится шоу-стоппером в конце.
не надо мудрить, сделайте два сосных вала (та еще задачка, но проще) и отбор мощи с мотора вне автомата перекоса.
Одновременный автомат не победил. будет синхронизировано-параллельный автомат.
все укладывается в цилиндр размером R50H128 (без цапф лопастей и механизма передачи вращения с роторов на автомат)
Как успехи в реализации?
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"3fb2a43c3df955007779595f":{"_id":"3fb2a43c3df955007779595f","hid":2452,"name":"pentajazz","nick":"pentajazz","avatar_id":null,"css":""},"4b8994e93df9550077763da7":{"_id":"4b8994e93df9550077763da7","hid":61940,"name":"kasmirov","nick":"kasmirov","avatar_id":null,"css":""},"4ba77b643df9550077762e88":{"_id":"4ba77b643df9550077762e88","hid":63195,"name":"masonx","nick":"masonx","avatar_id":null,"css":""},"500598463df9550077742049":{"_id":"500598463df9550077742049","hid":122503,"name":"DireSnake","nick":"DireSnake","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"501bb64f9970730077108590","hid":14907,"title":"Соосная схема с пустым ротором.","html":"<p>А таки победить удалось. Итак:<br>\nОсновная проблема с механикой CL-227 была в автомате перекоса. Верней - понимании как удалось передать все усилия на оба ротора. Все оказалось достаточно просто:<br>\nДва кольца автомата (на верхний и нижний ротор) находятся на подвижном кольце, которое управляется тягами идущими через центральный вал. Сами тяги - уже на сервоприводы. В той же роторной колонке идут и валы от двух двигателей.<br>\n<span class=\"image\" style=\"width: 600px\" data-nd-image-orig=\"http://content.foto.mail.ru/mail/diresnake/354/i-455.jpg\"><img src=\"http://content.foto.mail.ru/mail/diresnake/354/i-455.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1667%\"></span></span><br>\n<!--cut</p>-->\n<span class=\"image\" style=\"width: 600px\" data-nd-image-orig=\"http://content.foto.mail.ru/mail/diresnake/354/i-456.jpg\"><img src=\"http://content.foto.mail.ru/mail/diresnake/354/i-456.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1667%\"></span></span><br>\n<span class=\"image\" style=\"width: 600px\" data-nd-image-orig=\"http://content.foto.mail.ru/mail/diresnake/354/i-457.jpg\"><img src=\"http://content.foto.mail.ru/mail/diresnake/354/i-457.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1667%\"></span></span></p>\n<p>Чего не показано: тяги, которые должны передавать вращение с ротора на кольца автоматов перекоса. Фиксаторы на роторах есть, а на кольцах - еще нет.</p>\n<p>В идеале - двигатели убраны внутрь роторной колонки.<br>\n<span class=\"image\" style=\"width: 600px\" data-nd-image-orig=\"http://content.foto.mail.ru/mail/diresnake/354/i-458.jpg\"><img src=\"http://content.foto.mail.ru/mail/diresnake/354/i-458.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1667%\"></span></span></p>\n<p>Собственно осталось все это сделать в едином масштабе, добавить двигатели, серво, аккумулятор… исправить ошибки… и попробовать найти токаря.<br>\nВзлетит или нет… вот в чем вопрос.</p>\n","user":"500598463df9550077742049","ts":"2012-08-03T11:30:23.000Z","st":1,"cache":{"comment_count":7,"last_comment":"529c698a9970730077150bf2","last_comment_hid":7,"last_ts":"2013-12-02T11:05:46.000Z","last_user":"4b8994e93df9550077763da7"},"views":2740,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}