Съемочный квадрокоптер - Stein X4-01. История строительства - Часть 6
Здесь предыдущая - Часть 5
На подходе верхняя палуба - основной узел, содержащий полетный контроллер, силовую АКБ, дополнительную электронику, крепление БК подвеса.
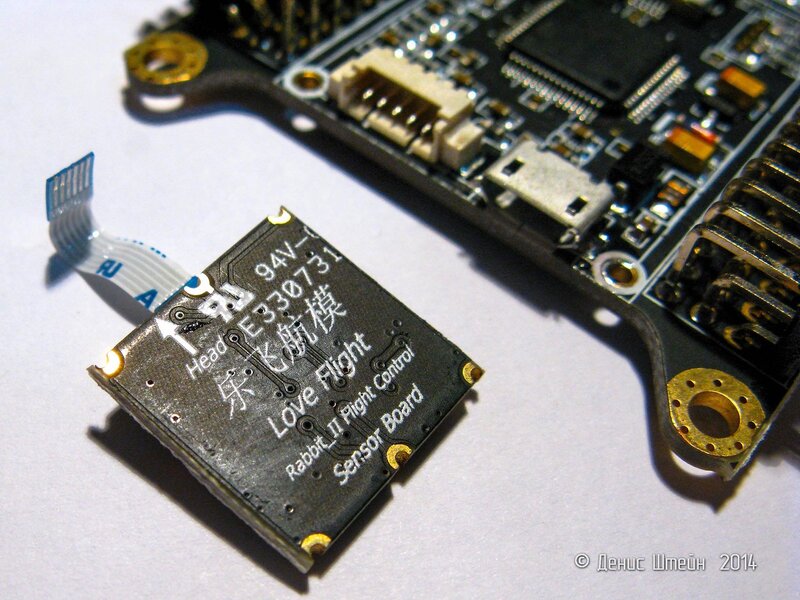
Начну с полетного контроллера - готовить буду кроличьи мозги.
За время долгих полетов, себя неплохо зарекомендовал Rabbit 1, но в последнее время, его стало сложно купить. Уже давно существует версия 2 кролика. Кролик 2, позиционируется как замена первой модели, для него существует недорогая плата OSD, общий функционал был расширен. Но вместе с тем, кролик 2 имеет один недостаток - не знаю какую траву курили разработчики этого девайса, но они сделали опрометчивый шаг - изготовили внешнюю платку IMU, на которой разместили вообще все датчики, включая магнитометр. Предыдущая версия имела отдельную гироскоп и акселерометр на плате процессора, а магнитометр и барометр - на внешней плате. Естественно, для первой версии у меня была уже опробованная схема -я выносил плату магнитометра рядом с GPS приемником, и забывал насовсем о наводках от проводов, крепежа и других элементов коптера. Поднимать высоко плату IMU кролика 2 нельзя - гироакселерометр будет находится много выше ЦТ аппарата.
Для X4-01 я хотел купить именно первую версию кролика - купил, но продавец написал, что их уже нет и он может за эти же деньги выслать вторую версию.
Я скрипя душой согласился, прикинув, что в случае, если у меня будут сильные наводки постоянного и переменного полей, я просто выпаяю магнитометр, сделаю микроплату, прицеплю ее на шину i2c, и подниму на самую верхнюю плоскость.
Получив кроличьи мозги, сопоставив их с чертежом, я понял, что их придется прилично переделать. Из-за небольшого пространства внутри квадрика, штатные мозги там не поместятся - придется выпаивать трехрядные гребенки, все провода к контроллеру буду припаивать - оно даже и лучше, возрастет надежность.

fotki.yandex.ru/users/steindenis/view/907768/
fotki.yandex.ru/users/steindenis/view/907769/

fotki.yandex.ru/users/steindenis/view/907770/
Нелепый шлейф, идущий от процессора к IMU ( напоминающий один из тех, что используются в самых дешевых мыльницах), я решил убрать. Шлейф, да и еще такого качества, соединяющий IMU с процессором - большое зло, малейшее нарушение контакта приведет к аварии.
fotki.yandex.ru/users/steindenis/view/907771/

fotki.yandex.ru/users/steindenis/view/907772/
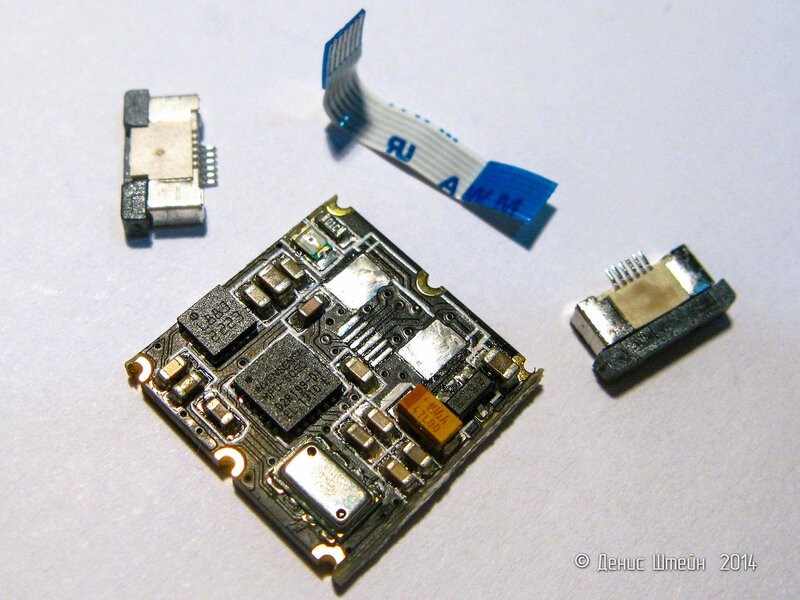
Китайцам удалось несколько реабилитироваться в моих глазах. Оказывается, по периметру платы они вывели все необходимые сигналы. На процессорной (материнской) плате имеются соответствующие отверстия. Убрав шлейф, все что потребуется сделать - впаять вертикально провода, соединив материнскую и плату IMU.

fotki.yandex.ru/users/steindenis/view/907773/
Для того, чтобы уместить кроличьи мозги внутри X4-01, я выпаял трехрядную гребенку.

fotki.yandex.ru/users/steindenis/view/907774/

fotki.yandex.ru/users/steindenis/view/907775/
Традиционно, надежно защищаю плату от воздействия влаги. Перед нанесением лака, я пропаял STM процессор с помощью флюса FluxPlus.

fotki.yandex.ru/users/steindenis/view/907776/
Кроличьи мозги приготовлены для употребления. Плату IMU, я пока не стал покрывать лаком - оставил на потом. Впоследствии, после того как будут проведены испытания, станет ясно, стоит ли выпаивать чип магнитометра. Соответственно, лаком покрыть можно в самый последний момент.

fotki.yandex.ru/users/steindenis/view/907777/
Модуль OSD покрыл лаком. Его буду ставить в последнюю очередь, когда X4-01 пройдет полетные испытания.

fotki.yandex.ru/users/steindenis/view/907789/
Начал собирать верхнюю палубу. Установил хомуты-зажимы. Все болты сажаю сразу на локтайт.

fotki.yandex.ru/users/steindenis/view/907790/
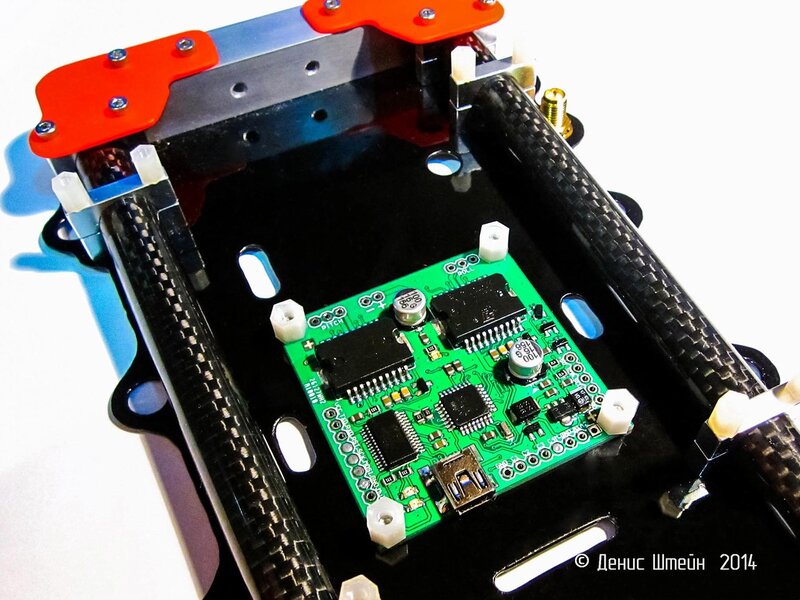
Тут я сделал большой рывок вперед. Установил трубы, плату контроллера подвеса. Выпилил алюминиевую балку крепления подвеса, рассверлил ее, закрепил уголками-пластинами.
fotki.yandex.ru/users/steindenis/view/907791/
Снял балку назад, понял, что было бы неплохо, хотя бы чуть-чуть отполировать. Сама балка будет крепиться тремя болтами М2.5 снизу к пластине, и сверху уголками из 1,5мм стеклотекстолита по 2 болта на сторону. Уголки-пластины, в свою очередь крепятся на хомуты, также по 2 болта М2.5.

fotki.yandex.ru/users/steindenis/view/907788/
Продолжил сборку. Теперь выглядит вот так, для масштаба с гоупро 3.

fotki.yandex.ru/users/steindenis/view/907925/
Установлено все, кроме передатчика 5,8 ГГц и модуля OSD. Их буду ставить по завершении сборки всего коптера.

fotki.yandex.ru/users/steindenis/view/907926/
*****************************
Следующая Часть 7
