
9 месяцев работ над проектом подошли к завершению. О начале проекта можно прочитать здесь.

Проект близок к завершению. Здесь, предыдущая Часть 12 - Подвес камеры. После полной сборки аппарата, я решил переделать\добавить некоторые функциональные элементы.
Чтобы предотвратить повреждение корпуса при взлетах\посадках, я добавил посадочные шасси. Тем более, что запас по тяге и полетному времени позволяли увеличить взлетную массу ЛА. На концах посадочных шасси я предусмотрел сменные элементы - самодельные накладки из пластика поликапролактона. При посадке на асфальт, бетон - оголенные элементы посадочных шасси будут приходить в негодность - расплющиваться, стираться, расслаиваться. Накладки из поликапролактона решат эту проблему как минимум на 2 года. После чего, с помощью фена за 15 минут можно установить новые.
Кроме того, я решил создать систему навигационных огней на мощных 3Вт светодиодах работающих в импульсном режиме, вместо светодиодной ленты.
Первым делом, я полностью разобрал аппарат, разместил два мощных 3Вт светодиодов красного и синего цветов свечения на нижней палубе ЛА. Перекрасил все детали рамы матовой черной краской ( первоначально была глянцевая краска).
Введение, первая Часть 1 здесь.
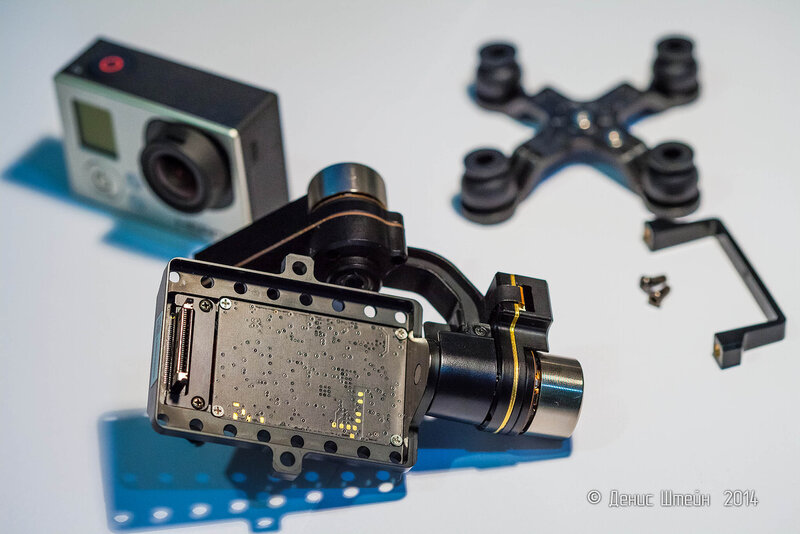
По итогам разборки и ремонтов подвесов H3-2D, я мысленно определил для себя выводы относительно конструкции подвеса в целом. Покупать такой подвес я себе бы не стал - гораздо лучше, самостоятельно изготовить свой, будет надежнее, во много раз дешевле. Слабые стороны подвеса H3-2D - незащищенные датчики Холла на каждом двигателе - от механических повреждений и от попаданий влаги. Сомнительные шлейфы на осях тангажа и крена. Несмотря на то, что на оси тангажа имеется петля с запасом, есть высокая вероятность повреждения шлейфов в будущем. Печатные платы имеют частичную герметизацию для защиты от коррозии, тем не менее, учитывая, что конструкция корпусов далеко негерметичная, возможны проблемы с попаданием влаги, пыли на электронику и переменные резисторы обратной связи. Положительный момент - чтобы почистить переменные резисторы - их необязательно выпаивать. Также, установка GoPro, своим разъемом на площадку подвеса имеет свои плюсы и минусы. С одной стороны изящный внешний вид, без висящих проводов, но с другой - полная незащищенность камеры от внешний воздействий.
Далее, финальная серия снимков.
Сборка подвеса близка к завершению. Предыдущая запись - Часть 11
Распаял и собрал плечи оси крена - двигатель привода тангажа и опору. Использовал шелковый эмалированный провод большего сечения, чем для датчика IMU. Все резьбовые соединения промазаны ThreeBond 1401C.
Для вывода AV сигнала с домика гоупро, сделал временное решение - поликапролактон. Вставил голый разъем в домик вместе с проводом, смазал поверхность домика силиконовым маслом. Горячим поликапролактоном создал форму, плотно прилегающую к домику. В будущем буду переделывать. Хочется сделать компактнее и встроить резиновый сальник, который даст необходимую герметичность.
Продолжаю сборку подвеса. Здесь предыдущая часть.

fotki.yandex.ru/users/steindenis/view/919034/
Датчик IMU приклеен специальной двухсторонней лентой Sony T4000. Толщина клеящего слоя - 0,11мм. Для большей жесткости и надежности, датчик зафиксирован нерж. крепежом М2.
Так как цены на готовые двигатели под средние и тяжелые камеры находятся на сравнительно высоком уровне, я провел испытания связанные с использованием двигателей от лазерных принтеров и копиров. Учитывая, что неисправные двигатели сервисные центры просто выбрасывают, то есть существенная экономическая выгода от использования таких моторов - в большинстве случаев их можно заполучить бесплатно. Под оси тангажа, крена и рысканья, можно подобрать соответствующие размеры моторов от разных моделей оргтехники. Большинство двигателей имеют вал 6мм и два подшипника. К достоинствам таких моторов можно также отнести полное отсутствие залипаний между статором и ротором.
В тестовом видео, я использовал в качестве нагрузки камеру Canon EOS 5D MarkII и объектив EF 17-40 F4L USM. Для тестового управления двигателем я исключил датчик IMU - контроль осуществляется с помощью переменного резистора. Балансировка камеры выставлена примерно.

Предыдущая Часть 7 - финальная сборка носителя подвеса
Параллельно, в приготовлениях к летным испытаниям X4-01, я занялся подвесом.
Основными требованиями к подвесу были следующие:
- Надежная, жесткая и прочная конструкция
- Обязательная установка защитного домика для GoPro 3\3+ Black
- Наличие двух точек опоры для оси тангажа
- Минимальные габариты
- Приличный внешний вид
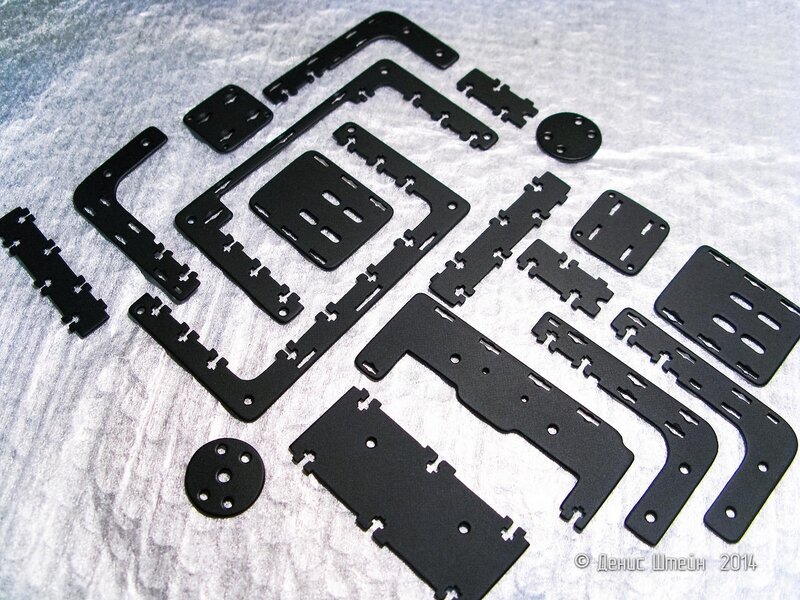
- Возможность изготовления всех деталей и узлов только руками, без использования станков и других сложных приспособлений.

Здесь предыдущая - Часть 5
На подходе верхняя палуба - основной узел, содержащий полетный контроллер, силовую АКБ, дополнительную электронику, крепление БК подвеса.
Начну с полетного контроллера - готовить буду кроличьи мозги.
За время долгих полетов, себя неплохо зарекомендовал Rabbit 1, но в последнее время, его стало сложно купить. Уже давно существует версия 2 кролика. Кролик 2, позиционируется как замена первой модели, для него существует недорогая плата OSD, общий функционал был расширен. Но вместе с тем, кролик 2 имеет один недостаток - не знаю какую траву курили разработчики этого девайса, но они сделали опрометчивый шаг - изготовили внешнюю платку IMU, на которой разместили вообще все датчики, включая магнитометр. Предыдущая версия имела отдельную гироскоп и акселерометр на плате процессора, а магнитометр и барометр - на внешней плате. Естественно, для первой версии у меня была уже опробованная схема -я выносил плату магнитометра рядом с GPS приемником, и забывал насовсем о наводках от проводов, крепежа и других элементов коптера. Поднимать высоко плату IMU кролика 2 нельзя - гироакселерометр будет находится много выше ЦТ аппарата.
Для X4-01 я хотел купить именно первую версию кролика - купил, но продавец написал, что их уже нет и он может за эти же деньги выслать вторую версию.
Учитывая, что в руки попала эта игрушка - решили записать небольшой обзор. Чуть позже, сделаю технический обзор связанный с ремонтом подвеса H3-2D - там шарик припоя, оставленный заводом натворил бед.
Продолжаю монтаж бортовой электроники между двумя пластинами рамы. Предыдущая Часть 4 здесь.
Покрыл лаком плату приемника FrSky -кроме ВЧ разъемов и тактовой кнопки.

Для защиты силиконовой изоляции проводов от повреждения и возможного короткого замыкания на раму, я использовал защитный чулок.

Итак, продолжение - уже Часть 3. Здесь, предыдущая статья.
Примерил модуль GPS.

fotki.yandex.ru/users/steindenis/view/907360/
Перед тем, как произвести финальную сборку модуля GPS, я покрыл плату и антенну лаком, в несколько слоев.
Продолжение. Часть 1 - здесь.
Вернусь к конструкции рамы квадрокоптера. Конструкция коптера такова, что ESC Quattro 25x4 располагается между двумя самыми нижними пластинами коптера. Также в этом пространстве располагается приемник с телеметрией FRSky D8R-II plus, стандартная “пищалка” монитор АКБ - окно семисегментного индикатора направлено вниз. Кроме того, рядом находится мощный светодиодный индикатор (проблесковый маячок) с пищалкой, подключаемый к полетному контроллеру - Rabbit II.
Плоская часть днища коптера позволяет закрепить элемент положительной плавучести (плотный пенопласт). Специальная опция - когда съемки большей частью времени проходят над водой и это позволит обойтись без вызова водолазов, в случае возникновения аварии.
В этой записи, я буду вести описание процесса постройки съемочного квадрокоптера для камеры GoPro 3+ Black. Здесь - Часть 2
Сам процесс, начиная с базового концепта длится аж с сентября месяца 2013 года. Очень много времени уходит на покупку и ожидание комплектующих - некоторые вещи теряет почта, некоторые “присваивает” таможня, китайцы высылают не то, что нужно и так далее… Кое-что приходится менять в процессе. Порой, некоторые этапы пришлось начинать с нуля - вообщем нормальный процесс, когда почти все делается с нуля.
Задача - сделать съемочный квадрокоптер, с минимально возможными габаритами, нескладной, максимально надежный, по возможности - как можно более отказоустойчивый, позволяющий оперативно использовать для съемок. Кроме того, в идеале - отсутствие висячих проводов, разнообразных нейлоновых стяжек (которые имеют свойство, со временем самостоятельно лопаться, при длительном воздействии солнечного света, перепада температур ) и прочих, уже прочно вошедших в быт, атрибутов самодельных квадрокоптеров.