После покупки этой платы у меня возникло много вопросов, а т. к. я начинающий, то вообще не знал что куда подключать.
Потихоньку начал разбираться и всё, что смог узнать полезного опишу в этой статье. Может кому пригодиться.
Строго не судить, это моя первая полная статья и рассчитана она на таких же новичков как я, которым надо всё подробно объяснять.
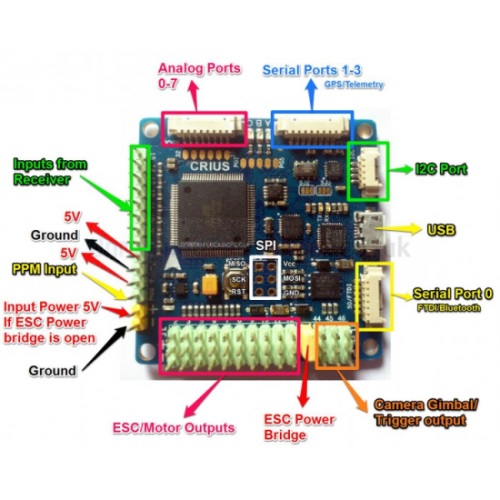
Надо бы разобраться, какие контакты что означают.
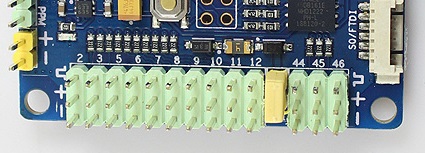
Вот нарыл в нете такую картинку:
ESC/Motor Outputs - сюда подключать регуляторы
Inputs from Receiver - сюда приёмник
Под контактами для приёмника находиться для него питание 5в.
Стрелки указывают где вход, а где выход.
Но в самом начале нужен USB, который справа. Через этот разъём будем прошивать. (это если через провод. кто-то может хочет подключить блютуз, что удобнее, но я так не делал, ничего объяснить не могу)
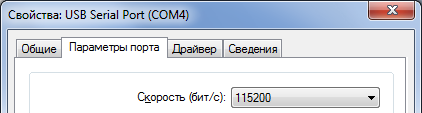
Ставим дрова на плату. Качаем. Подключаем контроллер, ставим дрова. Процедура простая, думаю все знают как это делать. Потом в свойствах устройства (в диспетчере устройств) выставляем скорость порта 115200 и запоминаем номер порта на всякий случай, например COM3, COM4 или какой там у вас…
Всё. Теперь можно шить.
Лично я поставил себе прошивку MegaPirateNG. С другими дела не имел.
И для самого процесса прошивки рекомендую использовать программу FlashTool. В ней выставляются все необходимые параметры, а последнюю версию прошивки прога качает сама и затем заливает в контроллер. Очень удобно. Но многие прошивают через Arduino IDE и вручную меняют некоторые части кода. Я бы не назвал этот способ сложным, просто тут надо времени немного больше потратить. Хочу обратить внимание на один момент.
В FlashTool есть пункт RC Input и три строки на выбор. Если не правильно выставить, то плата не будет реагировать на пульт.
Выбор такой: Serial PPM on A8 pin selected (по умолчанию)
Serial PPM (CPPM) on PL1 pin
Regular PWM inputs A8-A15
По началу я об этом вообще не знал, потом мне на форуме объяснили.
Если простым языком, то когда из ресивера выходит много проводов, каждый канал отдельно, то надо выбирать Regular PWM inputs A8-A15. Если выходит один провод, то что-то из первых двух. Я выбрал последнее. Подробнее про прошивку флэштулом можно почитать тут.
Плата прошита.
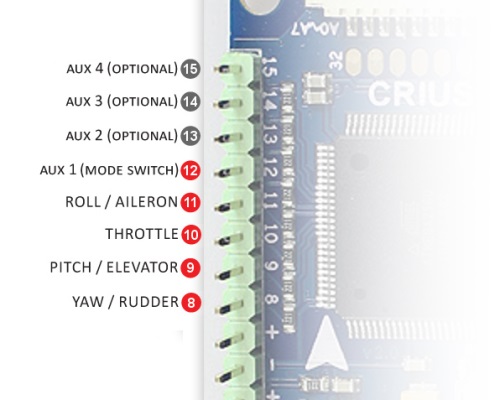
Далее подключение регуляторов и ресивера.
По первой картинке видно куда подключать приёмник. Вот распиновка контактов с их назначением:
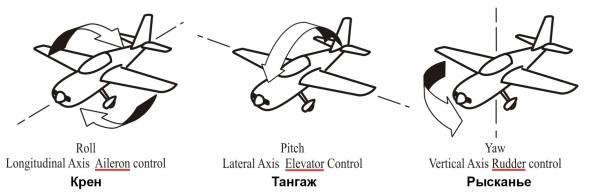
И сразу ещё одна картинка где наглядно видно, что означают все эти Roll, Pitch, Yaw
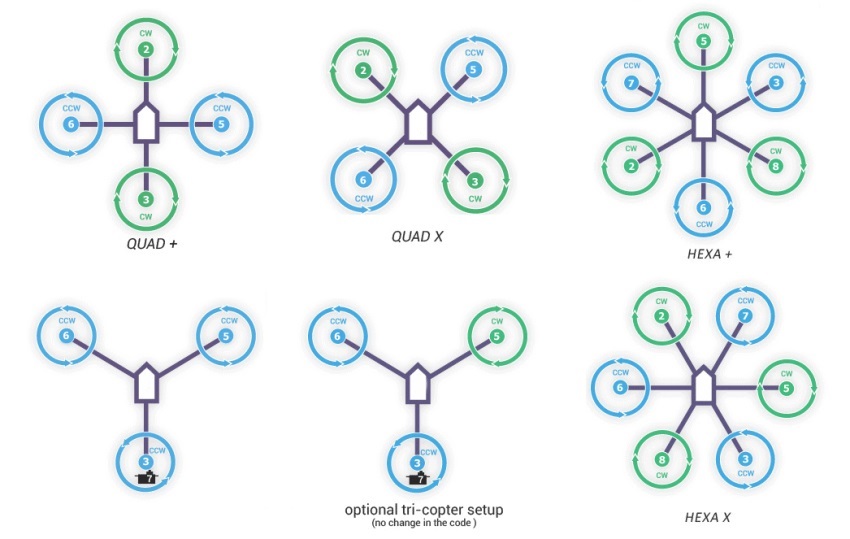
Теперь разберёмся с регуляторами. Видите цифры над выходами?
Вот используя следующую картинку подключаем регуляторы.
Не забываем, что чёрный провод к минусу, а белый сигнальный.
Теперь нужно проделать основные настройки в программе Mission Planer, это калибровка компаса, акселерометра и радиоуправления.
Качаем Mission Planer
После установки может быть предложит обновиться. Обновляем.
А ещё при первом запуске может предложить поэтапную настройку, она нафик не нужна. Отменяем.
Первым делом указываем COM порт и скорость 115200, жмём CONNECT.
Если всё правильно, то появится окошко с загрузкой:
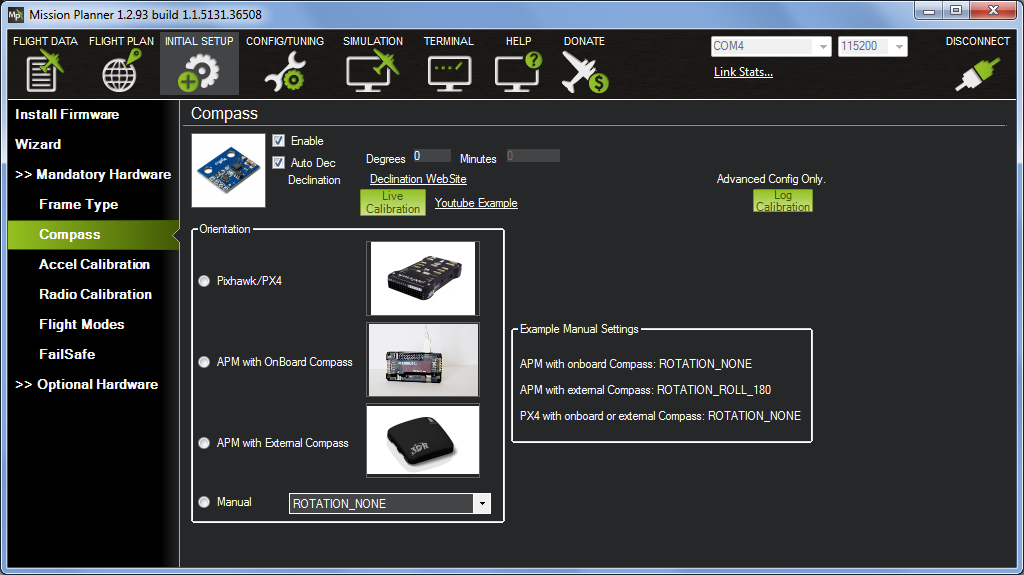
Далее калибровка компаса. Переходим Initial setup - Mandatory Hardware - Compas
Жмём Live Calibration
Теперь нужно вращать плату на 360 градусов в каждом её положении, примерно как этот мужик:
Но так удобно тем, у кого на плате подключён блютуз. У меня его нет и провод USB мне не позволил бы так крутиться, по этому я крутил только плату и осторожно, чтобы гнездо USB не повредить.
Далее калибровка акселерометра.
Выбираем строку пониже Accel Calibration
Тут нужно выполнять команды программы, поставить на нос, на левый бок и т.д. После каждого положения надо нажать любую клавишу, тогда появится следующая команда.
Далее калибровка пульта управления.
Выбираем Radio Calibration
Тут просто надо подвигать каждым стиком до упора во всех направлениях и убедиться, что всё совпадает, т.е. например газ на пульте соответствует газу на экране.
Это была первоначальная настройка после которой можно попробовать запустить коптер и думать дальше что надо подкрутить. Но это не в моей статье.
“Этот мужик” - кстати, это главный разработчик APM:Copter, модификацией (точнее - портом) которого является MegapirateNG
Добавь как каналы аппы калибровать.
Куда какие палки двигаются при калибровке.
И про аксель не забудь.
Чет мне кажется, я эту статью уже раньше читал… По крайней мере про мужика точно фразу помню.
Про подключении ППМ, принципиально лучше подключаться к PL1.
Почему - тут.
Лучше это в тексте поправить.
Чет мне кажется, я эту статью уже раньше читал… По крайней мере про мужика точно фразу помню.
И не лень по два раза постить свои дежавю? Дайте ссылку или идите мимо.
Еще куча картинок битых в тексте.
по идее бы поместить эту статью в отдельной теме в виде FAQa. Вопросы на которые будет дан ответ заносить в FAQ, и из темы все это удалять, оставлять только вопросы. Вот только будет ощутимая польза…
У вас на схеме распиновка контактов при подключении приемника нарисовано так:
8-R, 9-E, 10-T, 11-A.
Если посмотреть на плату снизу на ней написано так:
8-T, 9-A, 10-E, 11-R
Подскажите как правильно?
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"497ec4283df9550077772a70":{"_id":"497ec4283df9550077772a70","hid":43414,"name":"gorbln","nick":"gorbln","avatar_id":null,"css":""},"4c0957443df9550077760211":{"_id":"4c0957443df9550077760211","hid":67065,"name":"Shuricus","nick":"Shuricus","avatar_id":null,"css":""},"506b099b3df955007773f395":{"_id":"506b099b3df955007773f395","hid":126595,"name":"RTemka","nick":"RTemka","avatar_id":null,"css":""},"50beea413df955007773d0e8":{"_id":"50beea413df955007773d0e8","hid":130466,"name":"palikar","nick":"palikar","avatar_id":null,"css":""},"516de9003df95500777378c4":{"_id":"516de9003df95500777378c4","hid":148535,"name":"gans2000","nick":"gans2000","avatar_id":null,"css":""},"526276cf3df9550077730fc0":{"_id":"526276cf3df9550077730fc0","hid":179522,"name":"Hyperion","nick":"Hyperion","avatar_id":null,"css":""},"52833f973df955007772fd44":{"_id":"52833f973df955007772fd44","hid":183809,"name":"Kas-11","nick":"Kas-11","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"5330239c997073007710e5ff","hid":18264,"title":"Подлючение, прошивка и быстрая настройка Crius AIOP v2.0","html":"<p>После покупки этой платы у меня возникло много вопросов, а т. к. я начинающий, то вообще не знал что куда подключать.<br>\nПотихоньку начал разбираться и всё, что смог узнать полезного опишу в этой статье. Может кому пригодиться.</p>\n<p>Строго не судить, это моя первая полная статья и рассчитана она на таких же новичков как я, которым надо всё подробно объяснять.</p>\n<!--cut-->\n<p><strong data-nd-pair-src=\"**\">Надо бы разобраться, какие контакты что означают.</strong><br>\nВот нарыл в нете такую картинку:<br>\n<span class=\"image\" style=\"width: 500px\" data-nd-image-orig=\"http://s2.hostingkartinok.com/uploads/images/2014/01/8438edd1a24498db0cb94d345a41538b.jpg\"><img src=\"http://s2.hostingkartinok.com/uploads/images/2014/01/8438edd1a24498db0cb94d345a41538b.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 100.0000%\"></span></span></p>\n<p>ESC/Motor Outputs - сюда подключать регуляторы<br>\nInputs from Receiver - сюда приёмник<br>\nПод контактами для приёмника находиться для него питание 5в.<br>\nСтрелки указывают где вход, а где выход.<br>\nНо в самом начале нужен USB, который справа. Через этот разъём будем прошивать. (это если через провод. кто-то может хочет подключить блютуз, что удобнее, но я так не делал, ничего объяснить не могу)</p>\n<p><strong data-nd-pair-src=\"**\">Ставим дрова на плату.</strong><br>\n<a href=\"http://www.silabs.com/Support%20Documents/Software/CP210x_VCP_Windows.zip\" class=\"link link-ext\" data-nd-link-orig=\"http://www.silabs.com/Support%20Documents/Software/CP210x_VCP_Windows.zip\" target=\"_blank\" rel=\"nofollow noopener\">Качаем</a>. Подключаем контроллер, ставим дрова. Процедура простая, думаю все знают как это делать. Потом в свойствах устройства (в диспетчере устройств) выставляем скорость порта 115200 и запоминаем номер порта на всякий случай, например COM3, COM4 или какой там у вас…<br>\n<span class=\"image\" style=\"width: 422px\" data-nd-image-orig=\"http://s6.hostingkartinok.com/uploads/images/2014/01/1718f6440587b7a91ed0a4f30d96cd86.png\"><img src=\"http://s6.hostingkartinok.com/uploads/images/2014/01/1718f6440587b7a91ed0a4f30d96cd86.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 26.7773%\"></span></span></p>\n<p><strong data-nd-pair-src=\"**\">Всё. Теперь можно шить.</strong><br>\nЛично я поставил себе прошивку MegaPirateNG. С другими дела не имел.<br>\nИ для самого процесса прошивки рекомендую использовать программу <a href=\"http://docs.megapirateng.com/documentation/flashtool\" class=\"link link-ext\" data-nd-link-orig=\"http://docs.megapirateng.com/documentation/flashtool\" target=\"_blank\" rel=\"nofollow noopener\">FlashTool</a>. В ней выставляются все необходимые параметры, а последнюю версию прошивки прога качает сама и затем заливает в контроллер. Очень удобно. Но многие прошивают через Arduino IDE и вручную меняют некоторые части кода. Я бы не назвал этот способ сложным, просто тут надо времени немного больше потратить.<br>\n<strong data-nd-pair-src=\"**\">Хочу обратить внимание на один момент.</strong><br>\nВ FlashTool есть пункт RC Input и три строки на выбор. Если не правильно выставить, то плата не будет реагировать на пульт.<br>\nВыбор такой:<br>\n<em data-nd-pair-src=\"_\">Serial PPM on A8 pin selected (по умолчанию)<br>\nSerial PPM (CPPM) on PL1 pin<br>\nRegular PWM inputs A8-A15</em><br>\nПо началу я об этом вообще не знал, потом мне на форуме объяснили.<br>\nЕсли простым языком, то когда из ресивера выходит много проводов, каждый канал отдельно, то надо выбирать Regular PWM inputs A8-A15. Если выходит один провод, то что-то из первых двух. Я выбрал последнее. Подробнее про прошивку флэштулом можно почитать тут.<br>\nПлата прошита.</p>\n<p><strong data-nd-pair-src=\"**\">Далее подключение регуляторов и ресивера.</strong><br>\nПо первой картинке видно куда подключать приёмник. Вот распиновка контактов с их назначением:<br>\n<img class=\"image\" data-nd-image-orig=\"https://www.dropbox.com/s/4mpqmjrp2kdjlnh/connecting_components_copter_rcchannels.jpg\" src=\"https://www.dropbox.com/s/4mpqmjrp2kdjlnh/connecting_components_copter_rcchannels.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image\" style=\"width: 16px\" data-nd-image-orig=\"https://yadi.sk/d/LclkJFj4Gv3YR\"><img src=\"https://yadi.sk/d/LclkJFj4Gv3YR\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 100.0000%\"></span></span><img class=\"image\" data-nd-image-orig=\"http://hostingkartinok.com/show-image.php?id=adac1aa9bafeb08fc40b84413e0fc0be\" src=\"http://hostingkartinok.com/show-image.php?id=adac1aa9bafeb08fc40b84413e0fc0be\" alt referrerpolicy=\"no-referrer\"><span class=\"image\" style=\"width: 500px\" data-nd-image-orig=\"http://s5.hostingkartinok.com/uploads/images/2014/01/adac1aa9bafeb08fc40b84413e0fc0be.jpg\"><img src=\"http://s5.hostingkartinok.com/uploads/images/2014/01/adac1aa9bafeb08fc40b84413e0fc0be.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 80.0000%\"></span></span></p>\n<p>И сразу ещё одна картинка где наглядно видно, что означают все эти Roll, Pitch, Yaw</p>\n<p><span class=\"image\" style=\"width: 600px\" data-nd-image-orig=\"http://s5.hostingkartinok.com/uploads/images/2014/01/c616e9b6d634b6e17455cf785d25e514.jpg\"><img src=\"http://s5.hostingkartinok.com/uploads/images/2014/01/c616e9b6d634b6e17455cf785d25e514.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 32.3333%\"></span></span></p>\n<p>Теперь разберёмся с регуляторами. Видите цифры над выходами?<br>\n<img class=\"image\" data-nd-image-orig=\"http://forum.rcdesign.ru/%3Ca%20href=http://hostingkartinok.com%20target=_blank%20rel=nofollow%3E%5BIMG%5Dhttp://s3.hostingkartinok.com/uploads/images/2014/01/dc917dc4542bf8df9dbada3af2989766.jpg\" src=\"http://forum.rcdesign.ru/%3Ca%20href=http://hostingkartinok.com%20target=_blank%20rel=nofollow%3E%5BIMG%5Dhttp://s3.hostingkartinok.com/uploads/images/2014/01/dc917dc4542bf8df9dbada3af2989766.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image\" style=\"width: 425px\" data-nd-image-orig=\"http://s4.hostingkartinok.com/uploads/images/2014/01/e4176e599eb6d830a4eec685eb5dd9d7.jpg\"><img src=\"http://s4.hostingkartinok.com/uploads/images/2014/01/e4176e599eb6d830a4eec685eb5dd9d7.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 36.0000%\"></span></span></p>\n<p>Вот используя следующую картинку подключаем регуляторы.<br>\nНе забываем, что чёрный провод к минусу, а белый сигнальный.</p>\n<p><span class=\"image\" style=\"width: 850px\" data-nd-image-orig=\"http://s1.hostingkartinok.com/uploads/images/2014/01/278f805c21a5f67b4e482ab0478abd78.jpg\"><img src=\"http://s1.hostingkartinok.com/uploads/images/2014/01/278f805c21a5f67b4e482ab0478abd78.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 63.4118%\"></span></span></p>\n<p>Теперь нужно проделать <strong data-nd-pair-src=\"**\">основные настройки в программе Mission Planer</strong>, это калибровка компаса, акселерометра и радиоуправления.<br>\nКачаем <a href=\"http://ardupilot.org/planner/docs/mission-planner-installation.html\" class=\"link link-ext\" data-nd-link-orig=\"http://ardupilot.org/planner/docs/mission-planner-installation.html\" target=\"_blank\" rel=\"nofollow noopener\">Mission Planer</a><br>\nПосле установки может быть предложит обновиться. Обновляем.<br>\nА ещё при первом запуске может предложить поэтапную настройку, она нафик не нужна. Отменяем.<br>\nПервым делом указываем COM порт и скорость 115200, жмём CONNECT.<br>\n<span class=\"image\" style=\"width: 1024px\" data-nd-image-orig=\"http://s1.hostingkartinok.com/uploads/images/2014/01/cb314ec36e82d66be40fd3bdf5bce1eb.png\"><img src=\"http://s1.hostingkartinok.com/uploads/images/2014/01/cb314ec36e82d66be40fd3bdf5bce1eb.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1523%\"></span></span></p>\n<p>Если всё правильно, то появится окошко с загрузкой:<br>\n<span class=\"image\" style=\"width: 322px\" data-nd-image-orig=\"http://s2.hostingkartinok.com/uploads/images/2014/01/dc21d00f8cc35ae64acbb3b78308241b.png\"><img src=\"http://s2.hostingkartinok.com/uploads/images/2014/01/dc21d00f8cc35ae64acbb3b78308241b.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.5217%\"></span></span></p>\n<p>Далее калибровка компаса. Переходим Initial setup - Mandatory Hardware - Compas<br>\nЖмём Live Calibration<br>\n<span class=\"image\" style=\"width: 1024px\" data-nd-image-orig=\"http://s1.hostingkartinok.com/uploads/images/2014/01/6a05afa01b9009067de89dc093e06da1.png\"><img src=\"http://s1.hostingkartinok.com/uploads/images/2014/01/6a05afa01b9009067de89dc093e06da1.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 56.1523%\"></span></span><br>\nТеперь нужно вращать плату на 360 градусов в каждом её положении, примерно как этот мужик:</p>\n<div class=\"ez-player ez-domain-youtube_com ez-block\" data-placeholder=\"<iframe class="ez-player-frame" src="https://www.youtube.com/embed/-_mjfPlHL9o?feature=oembed&amp;autoplay=1" allowfullscreen></iframe>\" data-nd-link-orig=\"http://www.youtube.com/watch?v=-_mjfPlHL9o\" data-nd-link-type=\"linkify\">\n <div class=\"ez-player-container\" style=\"padding-bottom: 75%;\">\n <a class=\"ez-player-placeholder\" target=\"_blank\" href=\"http://www.youtube.com/watch?v=-_mjfPlHL9o\" rel=\"nofollow\">\n <div class=\"ez-player-picture\" style=\"background-image: url('https://i.ytimg.com/vi/-_mjfPlHL9o/hqdefault.jpg');\"></div>\n \n <div class=\"ez-player-header\">\n <div class=\"ez-player-title\">\n ArduCopter Calibration\n </div>\n </div>\n \n <div class=\"ez-player-button\"></div>\n <div class=\"ez-player-logo\"></div>\n \n </a>\n </div>\n</div>\n<p>Но так удобно тем, у кого на плате подключён блютуз. У меня его нет и провод USB мне не позволил бы так крутиться, по этому я крутил только плату и осторожно, чтобы гнездо USB не повредить.</p>\n<p>Далее калибровка акселерометра.<br>\nВыбираем строку пониже Accel Calibration<br>\nТут нужно выполнять команды программы, поставить на нос, на левый бок и т.д. После каждого положения надо нажать любую клавишу, тогда появится следующая команда.</p>\n<p>Далее калибровка пульта управления.<br>\nВыбираем Radio Calibration<br>\nТут просто надо подвигать каждым стиком до упора во всех направлениях и убедиться, что всё совпадает, т.е. например газ на пульте соответствует газу на экране.</p>\n<p>Это была первоначальная настройка после которой можно попробовать запустить коптер и думать дальше что надо подкрутить. Но это не в моей статье.<br>\n<img class=\"image\" data-nd-image-orig=\"https://www.dropbox.com/s/ux2rok8b3ov31di/aiop-overview.jpg\" src=\"https://www.dropbox.com/s/ux2rok8b3ov31di/aiop-overview.jpg\" alt referrerpolicy=\"no-referrer\"></p>\n","user":"50beea413df955007773d0e8","ts":"2014-03-24T12:22:52.000Z","st":1,"cache":{"comment_count":8,"last_comment":"552fedf89970730077139ae7","last_comment_hid":8,"last_ts":"2015-04-16T17:14:32.000Z","last_user":"52833f973df955007772fd44"},"views":8508,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}