Привествую всех любителей строительства мультикоптеров!
Давно уже не рассказывал нового о проекте, но вовсе не потому, что ничего не делал (хотя и это делал тоже 😃 ). За прошедшее время по мере возможности все же по немногу продвигался вперед со строительством. Известная мудрость о том, последние 10% до завершения строительства занимают 90% всего времени в данном случае полностью подтверждается, но, несмотря на это, вполне доволен тем, чего удалось на сегодня достичь.
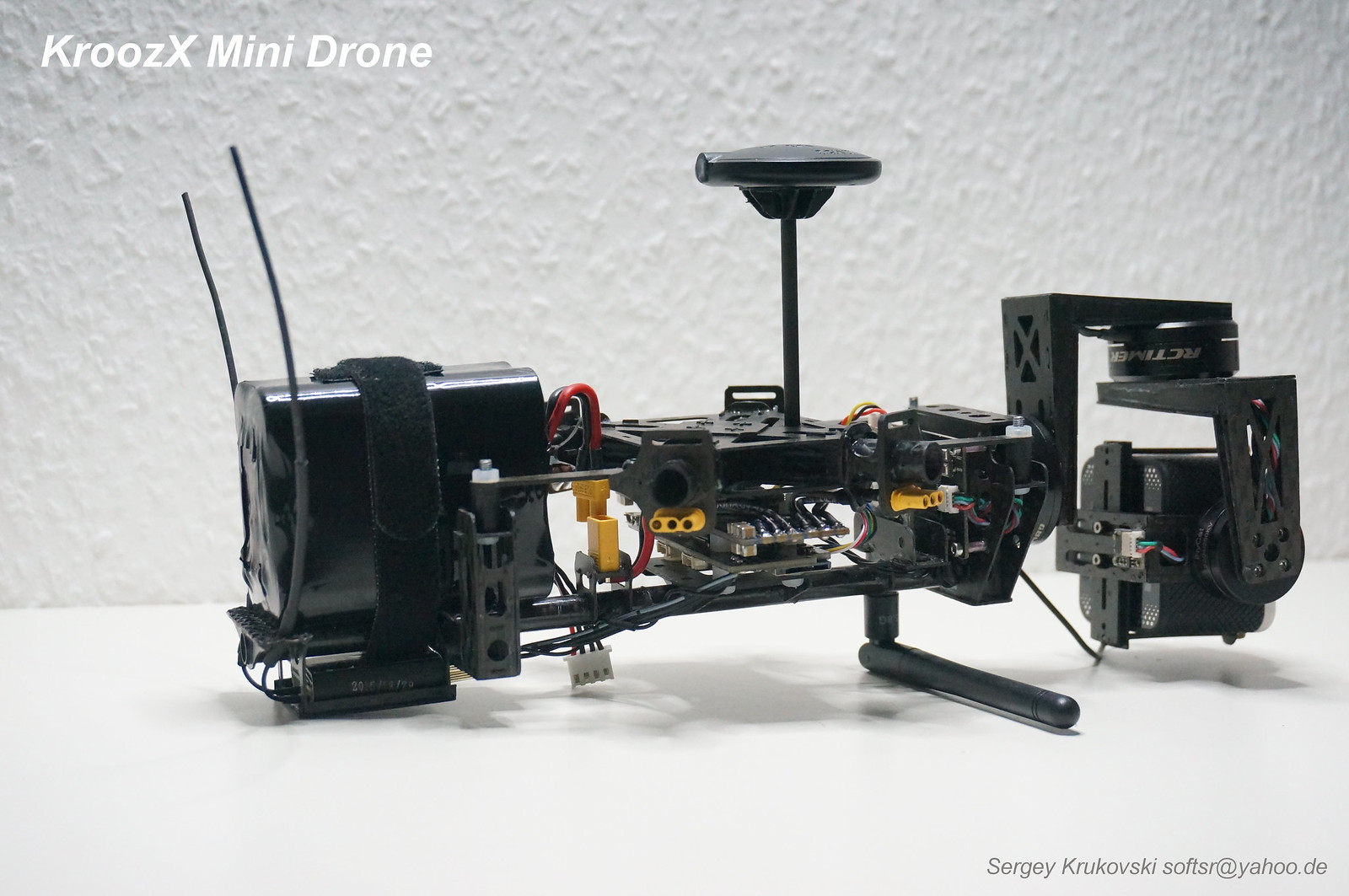
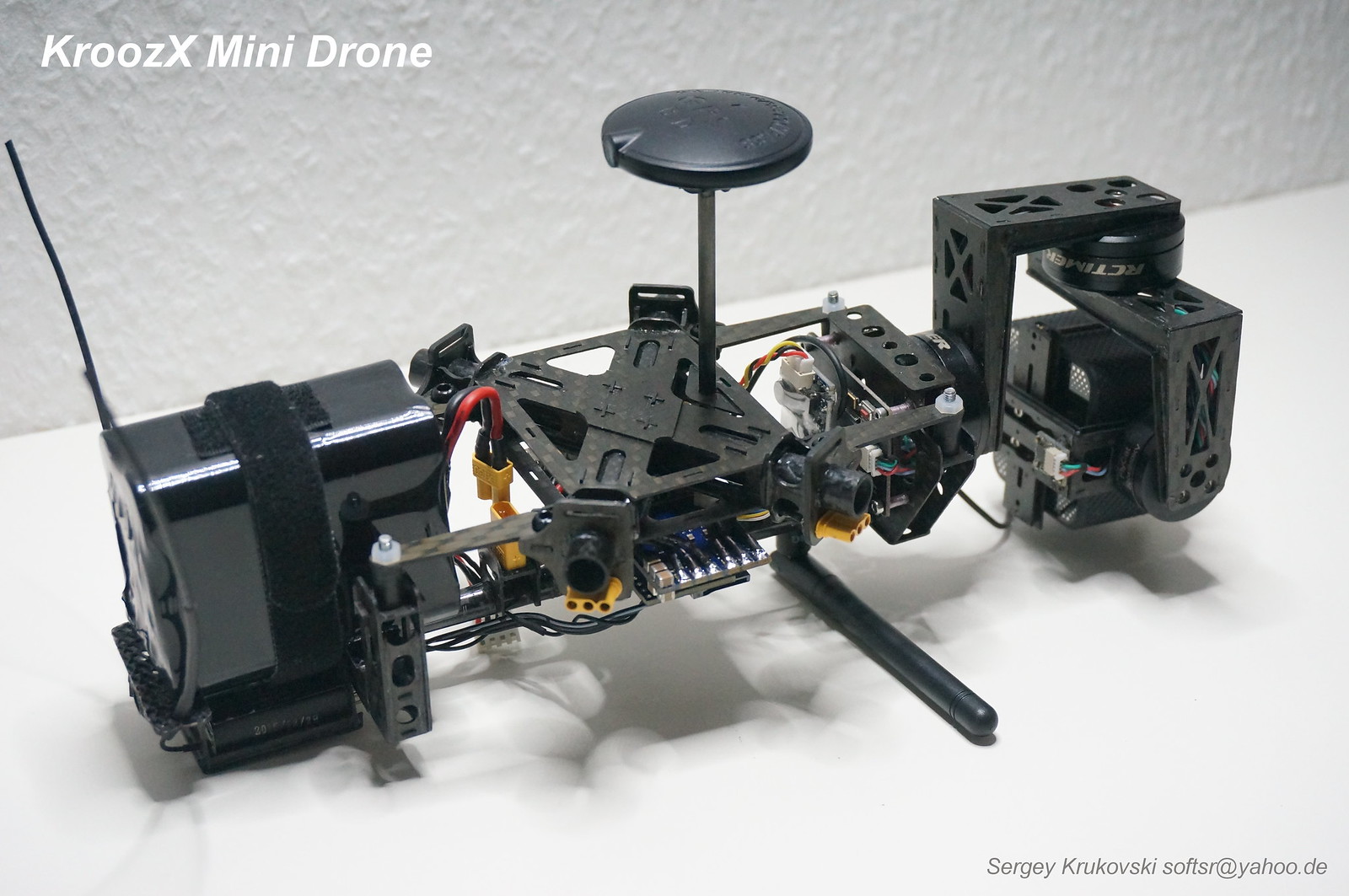
Подвес решил делать трехосевой. И, как мне кажется, это вполне неплохо получилось, хоть и пришлось повозиться. Все детали подвеса собраны на циакрин из выпиленных из пластины частей. Моторы подвеса 2804 и 2204, контроллер - mini Storm32.
Чего хотел добиться для своего варианта подвеса, так это гибкой возможности настройки баланса с различными камерами. Так например, в достаточно широких пределах регулируется положение камеры по всем трем осям, плюс благодаря гибкости настройки Storm32 есть возможность крепить камеры как справа, так и слева от мотора питча. Я нашел такую возможность достаточно полезной, т.к. на разных камерах разъем для карты и вход питания размещены в различных местах, и гораздо удобнее разместить камеру так, чтобы сохранить свободный доступ к карте памяти. Плюс я считаю очень удобным иметь возможность из недорогих комплектующих (фактически необходимы только моторы и контроллер) и из выпиленных деталей собрать либо подвес целиком, либо его отдельную часть (в случае краша, например).
Вот так сейчаст выглядит проект. Следующим шагом будут летные испытания и настройка аппарата и подвеса под проект iNav и Storm32. Немного забегая вперед скажу, что первые запуски уже прошли весьма успешно, за счет толковой виброразвязки аппарат очень стабилен в воздухе, на висении потребляет в районе 10А. То есть даже со всей той дурой подвеса и камеры предварительно можно рассчитывать примерно на минут 25-30 полета. Есть также мысли разместить вторую, чисто FPV камеру, на подвес, благо полетник как раз позволяет переключать два видеоканала, да и камеры эти чаще всего имеют гораздо более чистую картинку, чем та, что идет с выхода пишущей камеры.
Если вам понравилось (или не понравилось), как обычно милости прошу отписываться в комментах.
Всем спасибо за внимание и до следующих выпусков!
Comments
А Krooz - с каким софтом? 😃
Вопрос уже скоро станет риторическим 😃 Тут у одного и без того баттхерт на каждую мою разработку, а представляете что начнется, если я еще скажу, что прошивка к KroozX полетнику от Paparazzi? 😃 Пока что прошивается православным iNav-ом 😃
Чем же Paparazzi не угодила 😃
По мне так Paparazzi отличный проект, много в нем удобных вещей. Именно под ним я делал вообще первую прошивку для этого полетника. Но как я уже сказал, народ здесь больше знаком и понимает iNav. Против народа то не попрешь 😃
Сергей, отличный проект. Сам такой планирую собрать на моторках кобра 2206/1400 и пропах от мавика. Контроллер NOx32 от AIRBOT уже едет. Лучи 10мм? Как клеили крепления, просто на циакрин или укрепляли ниткой?
Сергей, отличный проект.
Спасибо, Сергей!
Лучи 10мм? Как клеили крепления, просто на циакрин или укрепляли ниткой?
Лучи здесь 8 мм. Детали клеятся на циакрин без дополнительного укрепления, циакрин держит мертво, особенно если зачистить глянец на карбоне. Кроме того, на стыках деталей делается гребенка с ответными пазами, получаются и механически очень прочные, легкие и легкоповторяемые узлы.
Сергей, сколько составляет вес коптера на первой фотографии (полетный вес с акком)? Какие моторы используете? Пропеллеры? Моторы подвеса очень похожи на комплектные от hakrc, это они? Или у вас два 28-х и один 22-й. Детали подвеса выпилены из карбоновых пластин? Пруток стойки GPS полый? не вижу проводов)
Добрый день, Руслан!
Вес в полном сборе с лучами и пишущей камерой (SJCam M10+ без встроеной батареи) и 3S2P акком - в районе 800г. Моторы использовал RCX H2208, пропеллеры 7"x4.5, моторы подвеса - два Rctimer GBM2804 и один 2204.
Фактически весь аппарат выполнен из пиленой карбоновой пластины и карбоновых трубок, клееных на циакрин. Как соберусь, сделаю видео того, как это выглядит до, в процессе и после сборки.
Стойка GPS - тоже карбоновая трубка, 4х3, кабель проведен внутри, его можно увидеть на этом фото, он подключен напрямую к полетнику одним разъемом. Висящие провода от GPS мне всегда особенно не нравились, в данном случае это наверное единственное место, где пришлось чуток повозиться с пайкой, чтобы вывести кабель вниз чезез центр корпуса GPS.
Интересный сетап и отличный вес! Каков ток висения?
Спасибо!
По первым подлетам ток на висении получился в районе 10А.
Хороший результат. Думаю, с кобрами 2206/1400 ток висения был бы чуть ниже. Тоже хотел сделать моторы вниз, но компоновка рамы не позволяет. Тут, как я понял, выкоса нет? БЫл ли положительный эффект на старшей модели от выкоса?
Спасибо Руслан!
Насчет меньшего тока висения сложно сказать, обычно от замены моторов мало что меняется. Наверное выигрыш был бы. Просто газ висения у меня вышел уже очень даже разумный, в районе 30-40%. А с учетом довольно большого разброса питающего напряжения с LiIon батареи, на разряженой батарее будет уже под 50-60%. Что в общем-то и достаточно оптимально. Думаю с моторами с меньшим КВ на разряженой батарее газ висения уже зашкаливал бы.
Выкоса на этой раме нет, как впрочем его фактически не было и на не-мини раме. Там выкошены только лучи, моторы же всеравно стоят вертикально. Целью было скорее достичь оптимального расположения центра тяжести.
С кобрами, думаю, лучше на 4 банки уходить. Там 220грамм тяги на 2.25А тока. Но ваш потяжелел бы на ~100 грамм и вышли бы те же 9.5-10А. Да, прирост минимальный. Мне едут air gear 200. Там 2205/2000 и хитрые пропы самозатяги 6.5 дюйма под 3 банки. Нужно будет погонять на стенде. Планирую раму собрать что-то около 500 грамм с двухосевым подвесом (без акка) и так же попробовать li-ion собрать
Да, очень похоже на правду. Обычно игра моторами дает мало толку, гораздо больше если менять пропеллеры, например. Интересно, какова эффективность тех пропеллеров, что в этом наборе Airgear 200. Может находили где-нибудь их тесты? Было бы интересно глянуть.
Ну а на 4S можно было бы перейти, взяв батарею 4S1P. Вес был бы уже грамм 740, то есть по 185г на мотор. Хотя и емкость батареи стала бы примерно в 2 раза меньше. Думаю вышло бы примерно то же самое, может чуть меньше по времени полета. Хотя, если делать двухосевой подвес, наверное такой вариант был бы оптимальнее.
, но оно мутное - там человек уходит на 4 банки и 5-е пропы. Явно под задачи гонщиков. Да и датчик тока не вызывает особого доверия. Думаю погонять еще на пропах от мавика, но на 2 банках.
Все же на таких мелких моторах и 2000КВ с весьма крупными для них 6,5"-7" пропеллерами врядли стоит переходить на 4S. 3S для такого конфига будет уже достаточно.
Вообще мне нравятся гоночные моторы и их эволюция, качество и форма используемых в них магнитов, зазоры. На мой взгляд именно у лучших гоночных моторов самый высокий КПД среди всех бесколлекторников. В общем то и не удивительно, что даже на мелких пропеллерах с тем же грузом, что и на классических 450-500 рамах, по времени можно летать примерно так же, если не дольше.
То же можно и сказать по электронике. Популярность гоночных квадров лихо движет эволюцию. Как вспомню первый пиксхавк и регули по DYS по 30A… Железо-то работало, работает и работать будет, но другой квадр на 4в1 регуле и пиксрэйсере сезон долетал не хуже и гораздо компактней получился. Со дня на день приедет оригинальный омнибас, так там еще и датчик тока и осд на платке, размером с cc3d. Больше рука не поднимается рисовать раму без отверстий 30.5х30.5
Да, сегодня датчиком тока можно скорее удивить, если его нету. Собственно именно простота сборки и компактность и функциональность были у меня основными стимулами сделать как мой собственный полетник так и эту раму. Все же гораздо проще, особенно для начинающего, подпаяться к одному рабочему узлу, чем собирать все по частям от пдб до моторов.
Ну а на раме этой, на всякий случай, я также в конце концов нарисовал 30,5х30,5 посадочные 😃
Сергей, подскажите были ли у вас сравнительные замеры тока висения или полёта на похожих скоростях на этой или других моделях … с расположением пропов с верху и снизу???
Пока именно такого сравнения не проводил. Но в случае расположения пропеллеров снизу есть надежда на большую эффективность за счет меньшего затенения потока. Особенно это актуально в случае относительно широких/квадратных лучей.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"3e5614843df9550077796a52":{"_id":"3e5614843df9550077796a52","hid":1354,"name":"Lazy","nick":"Lazy","avatar_id":null,"css":""},"54ec267b3df95500777202c1":{"_id":"54ec267b3df95500777202c1","hid":219107,"name":"SergejK","nick":"SergejK","avatar_id":null,"css":""},"55ba8ebf3df955007771afa8":{"_id":"55ba8ebf3df955007771afa8","hid":230423,"name":"serg2557","nick":"serg2557","avatar_id":null,"css":""},"55dccc4c3df955007771a1d3":{"_id":"55dccc4c3df955007771a1d3","hid":232441,"name":"sa64","nick":"sa64","avatar_id":null,"css":""},"55f8f0fd3df95500777195b7":{"_id":"55f8f0fd3df95500777195b7","hid":234336,"name":"cfero","nick":"cfero","avatar_id":null,"css":""}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"59eb6e66997073007711740e","hid":23079,"title":"KroozX Mini Drone - компактный квадрокоптер. Подвес и прогресс компоновки.","html":"<p>Привествую всех любителей строительства мультикоптеров!</p>\n<p>Давно уже не рассказывал нового о проекте, но вовсе не потому, что ничего не делал (хотя и это делал тоже <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span> ). За прошедшее время по мере возможности все же по немногу продвигался вперед со строительством. Известная мудрость о том, последние 10% до завершения строительства занимают 90% всего времени в данном случае полностью подтверждается, но, несмотря на это, вполне доволен тем, чего удалось на сегодня достичь.</p>\n<!--cut-->\n<p>Итак, вот так выглядит герой проекта на данный момент:<br>\n<span class=\"image\" style=\"width: 1600px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4508/36810183183_12aa6c3de4_h.jpg\"><img src=\"https://farm5.staticflickr.com/4508/36810183183_12aa6c3de4_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.4375%\"></span></span><br>\n<span class=\"image\" style=\"width: 1600px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4453/36810181643_f057782fc4_h.jpg\"><img src=\"https://farm5.staticflickr.com/4453/36810181643_f057782fc4_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.4375%\"></span></span><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/36810183183/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/36810183183/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/36810181643/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/36810181643/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a></p>\n<p>Здесь немного подробнее видна внутненняя компоновка, установка полетника и подключение батареи:<br>\n<span class=\"image\" style=\"width: 1600px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4505/37574595170_d932529fb8_h.jpg\"><img src=\"https://farm5.staticflickr.com/4505/37574595170_d932529fb8_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.4375%\"></span></span><br>\n<span class=\"image\" style=\"width: 1600px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4511/37832564711_63bd6d8707_h.jpg\"><img src=\"https://farm5.staticflickr.com/4511/37832564711_63bd6d8707_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.4375%\"></span></span><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/37574595170/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/37574595170/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/37832564711/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/37832564711/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a></p>\n<p>Батарею установил самодельную, 3S2P из LiIon ячеек US18650VTC6. Емкость получается в районе 6000мАч с хорошей токоотдачей.</p>\n<p>Вот что показывают весы:</p>\n<p><span class=\"image\" style=\"width: 1599px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4452/37876070542_7a2e7ec1e6_h.jpg\"><img src=\"https://farm5.staticflickr.com/4452/37876070542_7a2e7ec1e6_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 65.5410%\"></span></span><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/37876070542/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/37876070542/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a></p>\n<p>А здесь видна установка контроллера подвеса:<br>\n<span class=\"image\" style=\"width: 1600px\" data-nd-image-orig=\"https://farm5.staticflickr.com/4494/37574593180_6b9099b5e9_h.jpg\"><img src=\"https://farm5.staticflickr.com/4494/37574593180_6b9099b5e9_h.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.4375%\"></span></span><br>\n<a href=\"https://www.flickr.com/photos/150376428@N06/37574593180/in/dateposted-public/\" class=\"link link-ext link-auto\" data-nd-link-type=\"autolink\" data-nd-link-orig=\"https://www.flickr.com/photos/150376428@N06/37574593180/in/dateposted-public/\" target=\"_blank\" rel=\"nofollow noopener\">www.flickr.com/photos/…/dateposted-public/</a></p>\n<p>Подвес решил делать трехосевой. И, как мне кажется, это вполне неплохо получилось, хоть и пришлось повозиться. Все детали подвеса собраны на циакрин из выпиленных из пластины частей. Моторы подвеса 2804 и 2204, контроллер - <a href=\"http://www.goodluckbuy.com/mini-storm32-bgc-32bit-3-axis-brushless-gimbal-controller-for-gopro-upgrade-gl-3x.html\" class=\"link link-ext\" data-nd-link-orig=\"http://www.goodluckbuy.com/mini-storm32-bgc-32bit-3-axis-brushless-gimbal-controller-for-gopro-upgrade-gl-3x.html\" target=\"_blank\" rel=\"nofollow noopener\">mini Storm32</a>.</p>\n<p>Чего хотел добиться для своего варианта подвеса, так это гибкой возможности настройки баланса с различными камерами. Так например, в достаточно широких пределах регулируется положение камеры по всем трем осям, плюс благодаря гибкости настройки Storm32 есть возможность крепить камеры как справа, так и слева от мотора питча. Я нашел такую возможность достаточно полезной, т.к. на разных камерах разъем для карты и вход питания размещены в различных местах, и гораздо удобнее разместить камеру так, чтобы сохранить свободный доступ к карте памяти. Плюс я считаю очень удобным иметь возможность из недорогих комплектующих (фактически необходимы только моторы и контроллер) и из выпиленных деталей собрать либо подвес целиком, либо его отдельную часть (в случае краша, например).</p>\n<p>Вот так сейчаст выглядит проект. Следующим шагом будут летные испытания и настройка аппарата и подвеса под проект iNav и Storm32. Немного забегая вперед скажу, что первые запуски уже прошли весьма успешно, за счет толковой виброразвязки аппарат очень стабилен в воздухе, на висении потребляет в районе 10А. То есть даже со всей той дурой подвеса и камеры предварительно можно рассчитывать примерно на минут 25-30 полета. Есть также мысли разместить вторую, чисто FPV камеру, на подвес, благо полетник как раз позволяет переключать два видеоканала, да и камеры эти чаще всего имеют гораздо более чистую картинку, чем та, что идет с выхода пишущей камеры.</p>\n<p>Если вам понравилось (или не понравилось), как обычно милости прошу отписываться в комментах.</p>\n<p>Всем спасибо за внимание и до следующих выпусков!</p>\n","user":"54ec267b3df95500777202c1","ts":"2017-10-21T15:57:26.000Z","st":1,"cache":{"comment_count":21,"last_comment":"59fb1058997073007711ef33","last_comment_hid":21,"last_ts":"2017-11-02T12:32:24.000Z","last_user":"54ec267b3df95500777202c1"},"views":2687,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}