Motor Vibrometer - балансируем моторы с помощью полетного контроллера

те же яйца но с запуском на arduino


тут есть проблемка. график с синусоидой получился только когда я луч из тисков вытащил и держал в руке. до этого вообще был мотор закреплен на площадке в центре на деревяшке на резиновых демпферах.на показаниях был ад. и когда в руке площадку держал - тоже .
то есть это все дело, в зависимости от крепления, от оборотов, от дисбаланса вибрирует так, что никакой синусоиды на показаниях акселерометра не прослеживается.
я пока вижу способ решения в подборе опоры . в оригинальной статье там пружины были habrahabr.ru/post/207478/ надо че то придумать\подобрать.
ЗЫ обороты минимальные в районе 900об\мин
я тут провел маленькое исследование по конструкции стенда (применительно к поиску угла смещения масс и его уровня для чего на показаниях сенсоров надо получить\увидеть синусоиду).
Пришел к выводу что под каждую нагрузку нужен точно настроенный стенд.
Такой что б давал возможность совершать мотору собственные колебания с минимальным влиянием опоры (иначе в показаниях датчиков будет видно это воздействие и не видно исследуемой инфы). При этом есть предельный уровень дисбаланса, который сможет отследить стенд. Полагаю большинству и заморачиваться не стоит. Лучше уж методом тыка грузики подбирать (как в оригинале у автора темы).
но мне интересен стенд. поэтому продолжим.
попробовал крепление на 4 пружинах. жутко геморройная конструкция.

узкий рабочий диапозон. хрен изменишь характеристики. высокую точность получить не удалось
решил погуглить как оно собственно делается по науке. нашел тут www.cardanbalans.ru/balans.htm
качающуюся раму.
сделал

результат порадовал. система так и норовит войти вынужденные колебания с частотой мотора. невооруженным глазом видно (на малых оборотах) как раскачивается стенд вверх\вниз. кроме того есть возможность пружину менять и придумать механизм оперативного изменения ее жесткости\хода.
а еще надо попробовать сделать датчики

из пары катушка\магнит. да считывать показания наведенной ЭДС. потому что частоты акселерометра как то не хватает.
вспомнил что есть у меня фотик снимающий до 1000fps
снял на 240fps
частота вращения около 830rpm
PS. это достаточно хорошо сбалансированные мотор винт. качается все равно - значит точность высока.
хм. человек вон не заморачивался так в тисках и оставил луч с мотором только обернул мягкой пеной
продает наборчик 155$ www.dynexhobby.com
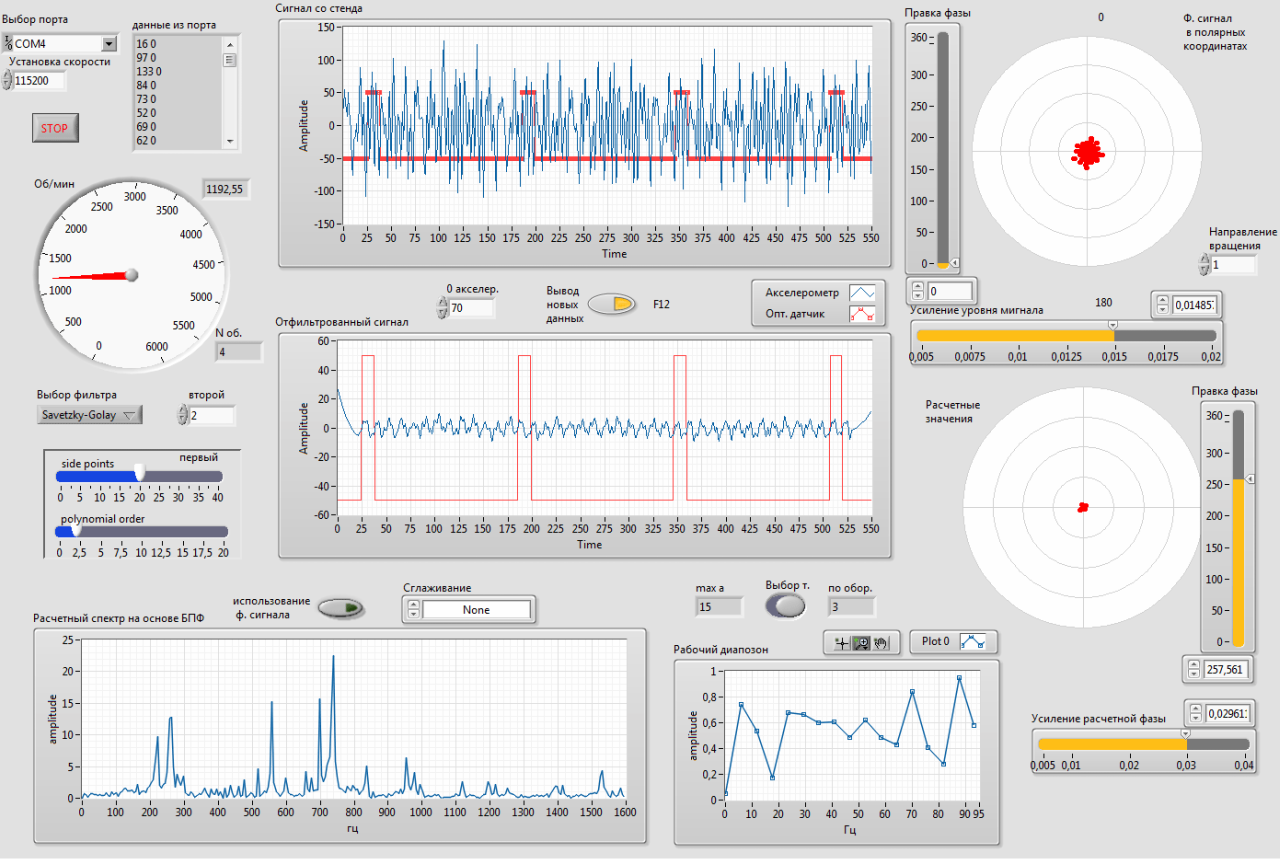
шлет данные в звуковую карту (линия микрофона). на компе прога на LabView писаная. собсно я в ней и делаю свою. все приколюхи из библиотеки можно надергать. что еще?
тема о балансировке www.rcgroups.com/forums/showthread.php?t=1769171 есть инфа о конструкциях стендов.
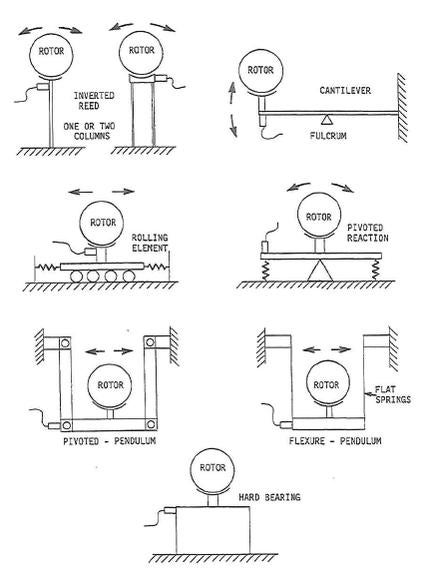
импеллер крепят по схеме крайней справа во втором ряду.
а вот человек из каши извлекает полезную инфу
крепление на демпферах. нда…
а еще он использует акселерометр ADXL345 пишет
the GY-521 which I understand is a MPU6050 looks a bit slow, it can sample only at 1khz for the accelerometer. The ADXL does it at 3.2 khz. Besides, the MPU6050 only has a I2C interface. For speed we need SPI and my program is made for that…
и о чудо у мну есть в запасе он (в составе GY-80).
diydrones.com/…/balancing-propellors-and-motors?co…
ну и в этом же сообщение ссылка на исходники включая код под arduino
ну круть! теперь можно что хош сделать.
готово.
все в дневнике rcopen.com/blogs/109830/19122
Класс, приятно смотреть что виброметр кто то реализовал из наших )))
У меня когда то была подобная идея, но руки так и не дошли до реализации. Кстати, как развитие идеи: Ставим на каждый луч, по акселерометру и сводим их на один мозг, дальше мозг анализирует вибрации на каждом луче и лампочками сигнализирует, если на каком то из лучей вибрации превышают порог. Ну типа, для квадрика - четыре светодиода (красный/зеленый), если все зеленые - можно летать, если какой нибудь красны - бяда )))
Ставим на каждый луч, по акселерометру и сводим их на один мозг, дальше мозг анализирует вибрации на каждом луче и лампочками сигнализирует, если на каком то из лучей вибрации превышают порог. Ну типа, для квадрика - четыре светодиода (красный/зеленый),
была мысль поставить аксель в регулятор, круглый регуль под мотором и в нем все анализировать, пока делаю “квадратный” и так времени не хватает, руки дойдут сделаю)))
Хочу обратить внимание на необходимость именно “правильной” опоры для снятия показаний. Лучшие результаты из всего что я пробовал (а я пробовал много), получаются на качающаяся платформе. Она позволяет использовать резонанс для нахождения самого минимального дисбаланса.
пружиной оперативно меняется частота колебаний системы. Обороты выставляются на эту частоту получаем резонанс. В итоге на показаниях отличный сигнал для работы.
см. отбалансированный мотор

На производстве похоже дешёвые моторы и не балансируют. Вероятность получить что то годное низка. Тем более говоря про сборку ВМГ. Хотя и такое бывает, если все части сделаны точно.
Вот видео как выглядит не сбалансированный ВМГ
Дисбаланс ужасный. Синусоида четкая, большая амплитуда.
А вот после работы (на той же частоте - резонансной).
Идеально! Я даже отдельно снял прогон полного диапазона оборотов.
Обратите внимание на провода - не колышутся. Даже старт\стоп не влияет.