Activity
Видео я попозже выложу. Сейчас в командировке.
Под GPS силовые провода подходят к контроллеру. Приподнял GPS сантиметра на 3, стало лучше. Надо полётник повернуть на 180 градусов, тогда провода ещё дальше отодвинутся.
Передатчик был Aomway 200 mW, потом поставил АКК X2 ultimate. Но проблема, похоже, в чувствительности очков EV100. Есть желание попробовать поставить r9mm и видео 200 mW 1.3GHz (Если видео не будет приёмник забивать).
Прочность конструкции, действительно, не высокая. Делал из того, что было под рукой. Первые эксперименты были - удлинял лучи фанерой. 😃 Падения в поле были, земля - не асфальт. Максимум - пару раз отлетал луч от центральной пластины - нитки с эпоксидкой не выдерживали. Ремонт - заново зафиксировать нитками и парой капель эпоксидки.
В текущей конфигурации:


Собирал в прошлом году тоже коптер на подобных комплектующих (Жаль, сейчас нет времени им заниматься, до ума довести). Контроллер Omnibus F4 Corner nano c GPS, прошивка iNav, HAKRC ESC 20A 4 in 1 с BLHeli_S, моторы Readytosky 1306 - 3100kV. Пропы 5030 с алиэкспресса. Батарея 3S1P LiIon. За основу была взята рама от 130 квадрика, верхнюю пластину оставил от нее, нижнюю вырезал по образу и подобию из стеклотекстолита 1.5мм, лучи из стеклопластиковой трубки 4мм, что была под рукой, приклеены на эпоксидку с нитью. На концах лучей стеклотекстолитовые площадки под моторы.


На фото один из промежуточных вариантов, ещё без Runcam split mini. Ток висения около 3.5А. Моторы сильно грелись, пока не отключил торможение в настройках регуля. После этого они оставались чуть тёплыми. Вес сейчас не подскажу, могу чуть позже взвесить. До полётов вдаль дело не дошло - видео пускало метров до 800, да и наводки на компас не давали стабильно отрабатывать RTH. Батарейку всю тоже так и не вылётывал в спокойном полёте.



Кто-нибудь хеадтрекер подключал к аппе? Jack 3.5 это тренерский порт - PPM in/out?
То есть, никаких искажений, размытостей не добавилось?
Уже сделал себе так. На все про все не спеша - полчаса работы. 😉
Как впечатления? Плюсы/минусы?
Если присмотреться, видно, что сверху выводы: земля и антенна, а снизу две земли…
Александр, Вы покупали модули и 433 и 868 МГц. Не сравнивали качество связи?
А можно добавить в OSD направление и скорость ветра? Других пожеланий и в голову не приходит. Всё как надо и всё красиво. Спасибо за труды! В планах собрать к следующему сезону.
Добрый день!
Собрал 210-й квадр с SPRF3 Evo. По комнате летал стабильно. После нескольких дней бездействия, двигатели начали запускаться несинхронно. Сбросил настройки, настроил заново - без изменений.
На дефолтных настройках выглядит так: добавляю плавно газ - моторы 2, 3 уходят плавно к максимуму, а 1,4 остаются на малых оборотах. На наклоны коптера реагируют адекватно. Несколько раз сбрасывал настройки, калибровал.
В чём может быть дело?
Настораживает, что при добавлении газа значения PID_sum[yaw] достигают -500 - -1000.
Upd: Стоило только написать сюда сообщение, и сразу всё по логам прояснилось 😉 Триммер по Yaw был скручен на передатчике. Чуял, что проблема на поверхности, а найти не мог. Нет, чтобы сразу заметить… Дико извиняюсь, к сожалению, сообщение не удаляется, а других вопросов пока нет. 😉
Константину огромное спасибо за проделанную работу!
Подниму немножко тему. Сделал себе Зефирку. За основу были взяты чертежи Зефира-мини от Meesha, а между крыльев добавлен фюзеляж шириной 16 см. Крылья из потолочки 3мм. Лонжерон из трёх слоев потолочки, по верхней и нижней кромке усилен бамбуковыми шампурами Фюзеляж из двух слоёв потолочки, спереди боковины усилены апельсиновой фанеркой, образующей “Лыжи-рога” 😉 Крылья соединяются на двух сосновых рейках 8х8, пропущенных через фюзеляж (Идея взята с МикроАнгела), что позволяет довольно быстро разбирать и переносить в большом пакете.








Размах крыла 1370 мм, вес без батареи 640 г. Двигатель DYS 2826 1400 kv. Винт 9050.
На борту Мобиус, курсовая камера, VTx 5.8 Ghz 600 mW, MiniAPM 3.1 с MinimOSD. В левом крыле самодельный приёмник OpenLRSng c каналом телеметрии, в правом GPS c компасом и датчик воздушной скорости.
Аккумулятор находится в заднем отсеке в районе центра тяжести, поэтому его вес мало влияет на центровку. (Достаточно чуть сместить аккумулятор в зависимости от его веса/габаритов и зафиксировать пенопластовой вставкой) После сборки возник вопрос. а как его кидать при запуске? Поэтому к днищу по-быстрому приклеил на скотч кусок пеноплекса. Стало удобней 😃
В субботу начались полевые испытания 😉 Был небольшой ветер (видно на OSD), но сколько можно ждать погоды и наличия свободного времени… 😃 Да и МЧС грозилось штормовым предупреждением, и нужно было торопиться … 😉 Далеко решил не отлетать, покружить над полем, потестировать… Чтобы сразу не разгрохать о Землю, начал с лёгкого варианта: Батарея 3S 1500 mAh: 
Чуть осмелев, поставил 3S 2200 mAh:
А затем и 3S 5300 mAh.
Летаем по ветру… 
И планируем, точнее, висим против ветра.



Пытаемся общаться с местными жителями…
Делаем разворот… И… Mission Planner кричит, что соединение потеряно, передатчик гаснет - разряд аккумулятора.Увлёкся, не заметил, как время пролетело. В голове мелькает мысль, что еще и фэйлсейв не оттестирован. А тем временем, Зефирка на стабилизации делает снижение… 
Выравнивание… 
Выдерживание… 
Касание… 
…И, наконец, торможение… …Оно же - новогодняя открытка с ёлками и шишками… 😉
…Оно же - новогодняя открытка с ёлками и шишками… 😉
…Ну и, конечно же, с ёлочными игрушками… 😉 
Зачистил зубами провода, подоткнул к передатчику израсходованный бортовой аккумулятор, считал с борта телеметрию с координатами и отправился на поиски. Место “падения” оказалось примерно в 450 метрах от старта, На самой высокой ели, визуально, на высоте 8-9 этажа. Залезть сходу не получилось. Кидание палок с верёвками, рогаток, луков и арбалетов за 2 дня ни к чему не привело. Да и МЧС, с обещанным и таким желанным теперь штормом, обманул, ветер вскоре после посадки, совсем затих. 😃 А выручил хороший коллега - электронщик. Он же альпинист и большой любитель полазить по деревьям 😉 После работы заехали, он залез наверх, после долгих колебаний скинул Зефирку вниз - других вариантов не было. Она хорошо так шлёпнулась о земь, практически носом. Из повреждений… только чуть помятая передняя кромка одного крыла - и то при посадке на дерево 😉 Вот тебе и потолочка… Летать будет без ремонта. 😉 и в минус аккумулятор - в ноль разрядился за 2 дня.
Извиняюсь за длинный пост, просто много эмоций от первого полёта и особенно от успеха спасательной операции 😉
А мораль сей басни такова: Небо не терпит разгильдяйства! Все шансы случиться худшему, обязательно сбудутся 😉
А от Зефирки пока только восторг - летает отлично, управляемость на уровне. А в режимах стабилизации вообще сама летает 😉 Да ещё и прочная оказалась 😉
Извиняюсь за оффтопик. Подскажите, где можно приобрести колена для удочек? Прошелся по всем магазинам “Охота-рыбалка-туризм” у себя в городе. Есть только вершинки для удилищ. Насчет остальных колен, продавцы руками разводят, говорят, нет таких и не бывает. Может, можно где-то через инет заказать? В интернет-магазине находил, но там указан только тип удилища, ни длины, ни диаметров колен нет. Давно есть желание Икара построить, но всё упирается в эту самую хвостовую балку…
начинать делать дережабли…
А они и поболее полукило могут перевести при взлётном в 0гр.
А вот это тема.😃 Тем более, что полётный вес у них, я бы сказал, отрицательный, что явно, меньше 250 грамм. 😃
А есть опыт эксплуатации данного двигателя? Интересно было бы услышать впечатления. Что-то отзывов много не нашел.
С помощью гир, не знаю, можно ли реализовать. Возможно, компас добавили. Ставишь квадр к лесу передом, к себе задом, он запоминает это положение и далее управляется так же, как если бы всегда сохранял такое положение, независимо от его вращения. Т.е. стик вперед - он летит вдаль, назад - к себе, влево - влево, вправо - вправо, как бы ни был повернут к пилоту. Для начинающих удобно, когда в точку уходит.
На Банггуде появился предзаказ на Cheerson CX-10A Headless Mode. Думаю, весьма занятно должно быть…
Я подумываю вынести кнопки, отвечающие за флип и переключение расходов, на торец пультика
Спасибо за идею - сделал - понравилось. Кнопки удобно под пальцами разместились. Флипы крутить - одно удовольствие.
Заметил, что калибровка вроде как не сохраняется при выключении квадрика. Включил, калибранул на чуть наклонной поверхности, отлетал аккум, зарядил, включаю - калибровка сбросилась. Заново откалибровал - опять всё ок.
Дальность управления, по сравнению с Хабсаном Q4, поменьше. Не раз замечал, когда держишь пульт, прикроешь его переднюю правую часть рукой, отлетишь метров на 15-20, мух срывается и начинает падать, уберешь руку - опять управление восстанавливается.
А зачем? Только если для “реализма”, чтобы послушать жужжание моторов
Конечно, только ради эстетического наслаждения 😉 Зачем же еще? Бзззззз-бзззз-бз-з-з-з-Бум 😉
Подскажите, на какой дальности управление теряется, и как квадрик при этом себя ведет? Просто падает? После этого связь с пультом не восстанавливается? Зарулился я им, он скрылся из виду, потом звук перестал слышать, попытался ещё порулить, звук появился не надолго и вновь пропал. Последний раз видел его на высоте метров 30. Надо было сбросить газ, да идти искать… Вот, пока новый из Китая едет, есть время поискать. 😉 Очертил на карте дугу в 150 м, плюс ещё 30 м накинул… Но как-то там везде трава, даже не по пояс, и кусты. Ходил часа три, газовал, но он не отозвался.
А так, по-моему, для начального обучения, самое то, машинка. Я его раз в пике метров с 30 пустил, а в последний момент стик газа с тангажом перепутал. 😉 Забавно он в пашню вошел 😉 Но целенький остался.
107C вообще не пишет звук, все что прорывается это наводки от моторов. И увеличить громкость можно только этих наводок. Не верите? Проверьте сами - разберите дрон - там нет микрофона.
К сожалению, разобрать не успел - “Он не вернулся из полёта”. Но звук на 0.3 Мпикс камере точно писался - не только изменение звука моторов, но и удары об землю, и скрежет веток при падении. 😉 Кстати, на банггуде на фото модуля 0.3 Мпикс камеры видно пустое место - возможно мод микрофон. Фото 2Мпикс камеры там только с одной стороны. Вот в связи с выбором, какую версию BNF заказать, тоже интересует вопрос, пишет ли звук 2Мпикс камера?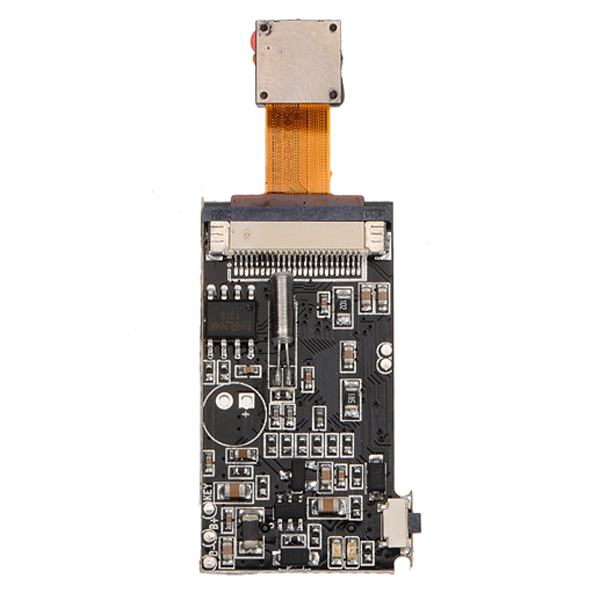
Кстати, в связи в “невозвратом”, кто-нибудь делал для квадрика маленькую лёгкую пищалку, чтоб легче было искать?. Есть мысль, сделать, чтоб она включалась минут через 10 после подключения аккумулятора.
Я сюда запостил кой-чего из фото, понять можно.
Спасибо большое! Перепаял, на кнопки тоже провода перекинул. Всё отлично. У джойстиков резисторы можно аккуратненько отщелкнуть от металлического корпуса - так выпаивать оказалось удобнее.
один переделал из мод2 в мод1
Подскажите пожалуйста, как переделывали? Джойстики местами меняли? В принципе, 4 провода кинуть, только пружина на газу получается. А сами джойстики вроде не разборные.
Покупал 2 квадрика, один с banggood, второй на алиекспресс. Оба летают уже 3 недели отлично. Один начал самопроизвольно в полёте дергаться, в сторону начало уводить. И посторонний шелест появился, вибрация небольшая. Определил виновника на одном из лучей, думал мотор барахлит, а заменил винт - всё нормально стало, опять отлично летает. К слову, Хабсан Q4 чуть раньше брал, на нем уже все моторы поменял. На этих пока живут.