Activity
Уважаемые форумчане, прошу помощи в анализе логов квадрокоптера.
Логи вот здесь.
При полетах случалась следующая ситуация: в режиме loiter (хотя, это вряд-ли имеет значение) квадрокоптер вдруг внезапно переворачивается (своеобразный флип). В первый раз он не успел перевернуться полностью и все закончилось крашем, а во второй - успел и полет продолжился нормально, без нареканий (см., соответственно, первый лог - в конце, второй лог - примерно на третей минуте полета). То есть, проблема внезапная и кратковременная. Честно говоря, я ошибочно подумал - может это управляемый контроллером флип, случайно вызванный специальным движением стиков (вариант был отвергнут после прочтения документации)?
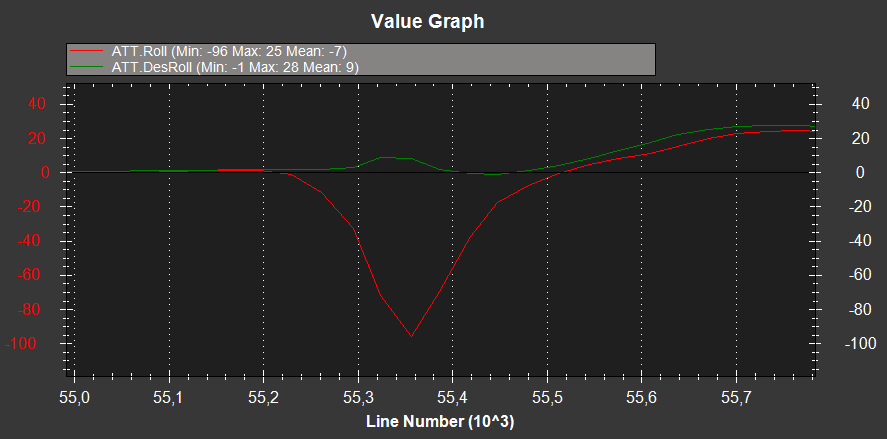
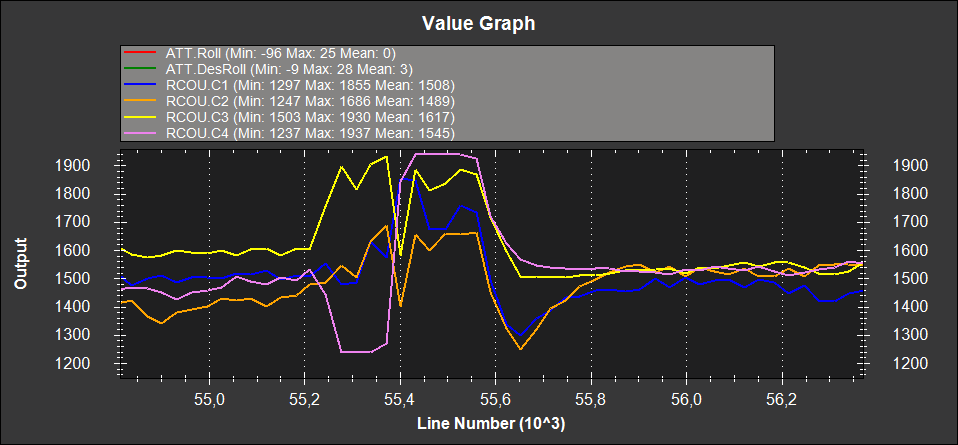
Насколько я смог понять из логов, с точки зрения контроллера - переворот совершенно неуправляемый и вызван внешними (по отношению к контроллеру) факторами. Переворот такой, будто один из моторов(номер 4?) выходит на полные обороты (ошибка контроллера мотора), или скручивается винт (с противоположной стороны; до второго раза я был уверен, что причина в этом).
Верны ли мои выводы? Кто-нибудь сталкивался с подобной проблемой?
Это мой первый квадрокоптер, налет небольшой (в общем около двух часов), но кроме этих дух отдельных случаев никакие проблем в полете не было. Во всех режимах все стабильно, четко.
Аппарат такой:
Двигатели: Sunnysky X2212
Регуляторы: DYS BL30A Mini 30A BLHeli
Контроллер: Pixhawk PX4 2.4.8 (+GPS, компас)
Момент переворота из второго лога: