Mini Skywalker 840mm
После улёта большого ская я временно отошел от самолетов и вернулся к коптерам, но все равно хочется какого-то разнообразия и ощущения полета, а т.к. бюджет ограничен – решено было делать что-то простое.
Внимание, далее много текста и большие картинки!
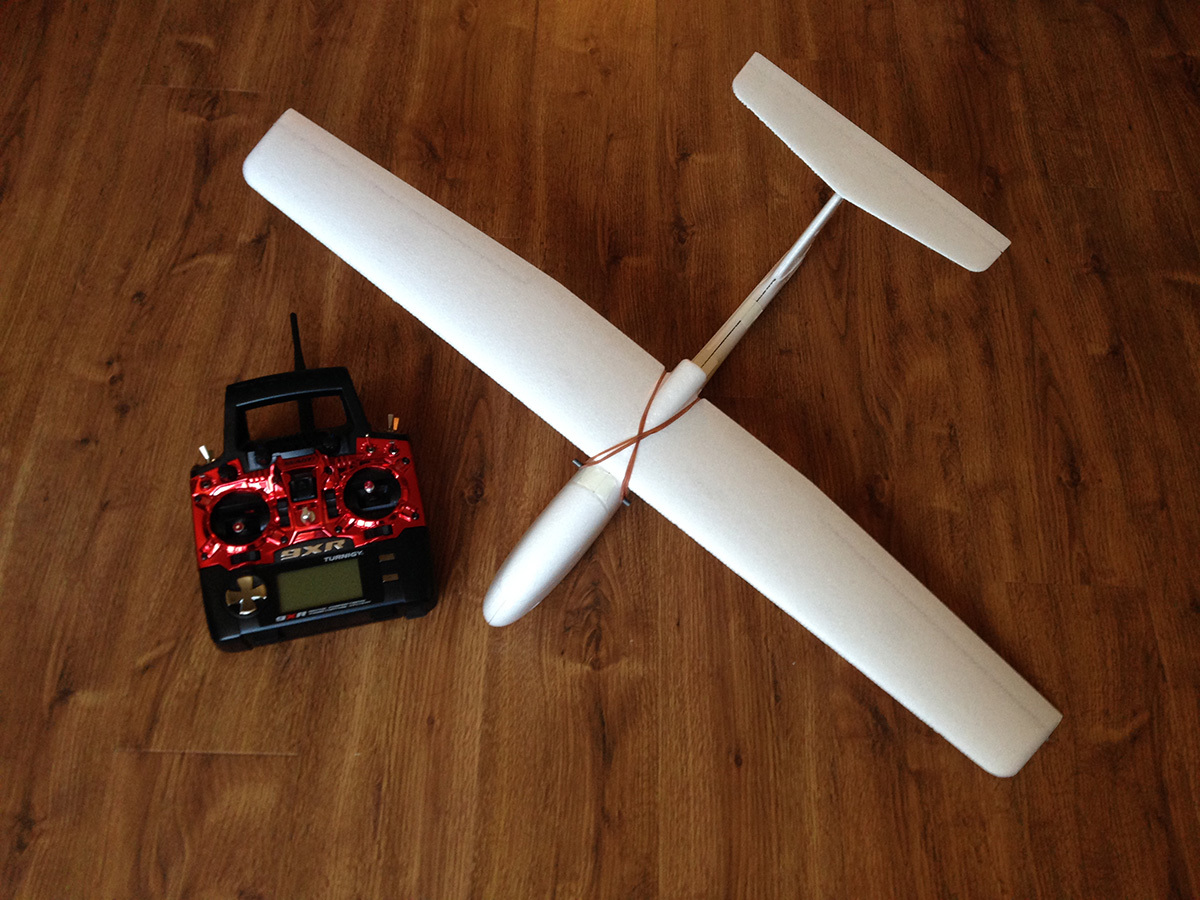
В память о разворованном полицейскими разбившемся скае выбор пал на mini skywalker. Самолет не особо выдающийся летными характеристиками и не очень подходящий для fpv, но он меня подкупил своей копийностью оригинала, малыми размерами и большой скидкой на хоббикинге.
Получил я его через 3 дня после заказа с российского склада, курьер вручил мне пару коробок, в одной мелочевка а другая с самолетом. Собрав его я понял, что меня ждет…
К сожалению, тема по этому самолету на форуме насчитывает всего 3 страницы и уже давно закрыта для обсуждения, но на rcgroups ему уделили больше внимания, так что примерную конфигурацию я уже знал заранее.
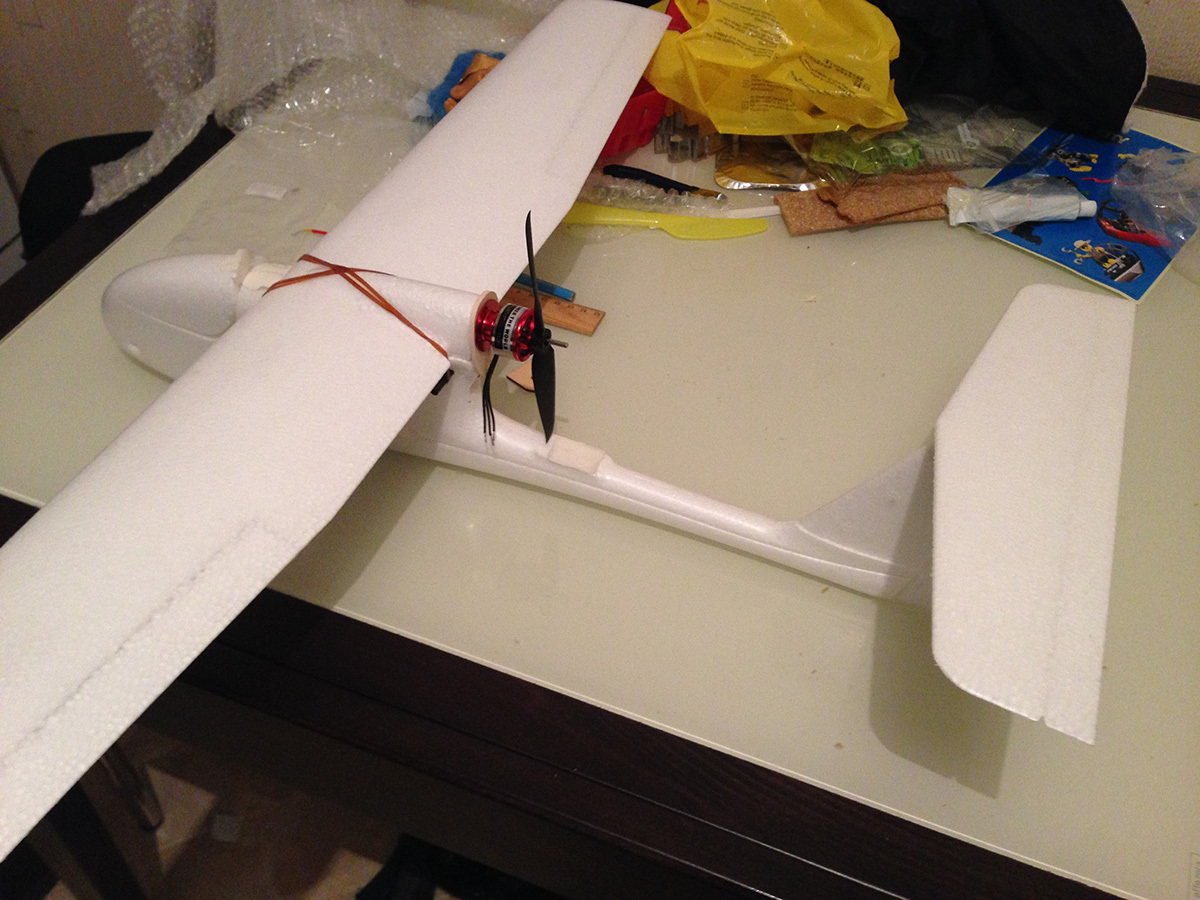
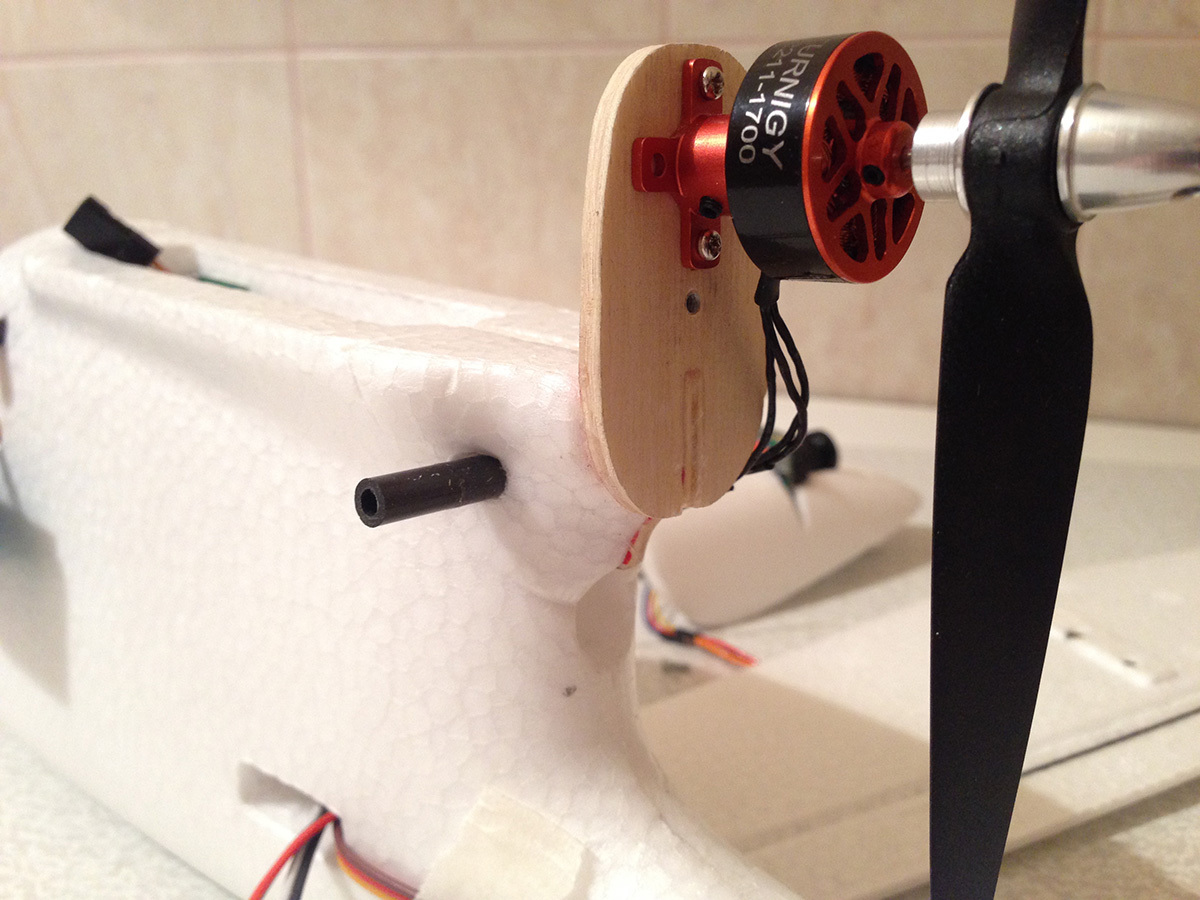
Мне очень не понравилась идея стандартного крепления мотора на крыле, но было найдено хорошее решение в виде отдельной моторамы закрепленной в фюзеляже, увы, доступа к 3D принтеру у меня нет, поэтому взяв фанеру, дремель и циакрин у меня получилось вот это:



И получилось достаточно удачно, добавить пару забивных гаек М2 и можно менять мотор!
Изначально я рассчитывал поставить FC 28-12 Brushless Outrunner 1534kv но после того как получил его мое желание пропало, он оказался больше чем я ожидал.
Вместе с мотором ко мне приехали сервы HXT500 и дополнительный (в старом скае я их использовал для видео передатчика, так что у меня была еще пара запасных) аккум ZIPPY Compact 1000mAh 3S
Начитавшись отзывов о поведении самолета в воздухе я хотел установить Eagle Tree Guardian 2D/3D но в барахолке на тот момент такого не оказалось, а покупать новый было выше бюджета. Пришлось заказывать более простую стабилизацию OrangeRX RX3S 3-Axis Flight Stabilizer V2 а т.к. я очень хотел сделать из него fpv то докупил простенькую Mini OSD System w/GPS Module (разумеется после того, как нашел идеальную прошивку u-osd которая полностью преображает всю картинку).

(Фото не мое)
Управление было решено оставить от старого ская – lrs rmilec. К нему пришлось докупить RMILEC R4047LITE – более простую и легкую (в прямом и переносном смысле) версию оригинального приемника. А вместе со всем этим “богатством” был куплен новый мотор: Turnigy 2211 Brushless Motor 1700kv и регулятор HobbyKing 12A BlueSeries
После этого у меня было еще много приключений, таких как обанкротившийся работодатель, новый год, очередной день рождения и переезд из Москвы обратно в Новосибирск, что в значительной степени повлияло на весь проект. Не знаю как, но моя жена все терпит) и мое хобби и эти переезды… еще и поддерживает! Когда на ХК была акция с бесплатной доставкой, она (моя жена) подарила мне большой Skywalker 1900 несмотря на и так большую дыру в бюджете после переезда. Спасибо ей за все!
После всего вышеперечисленного я вновь вернулся к постройке mini skywalker.
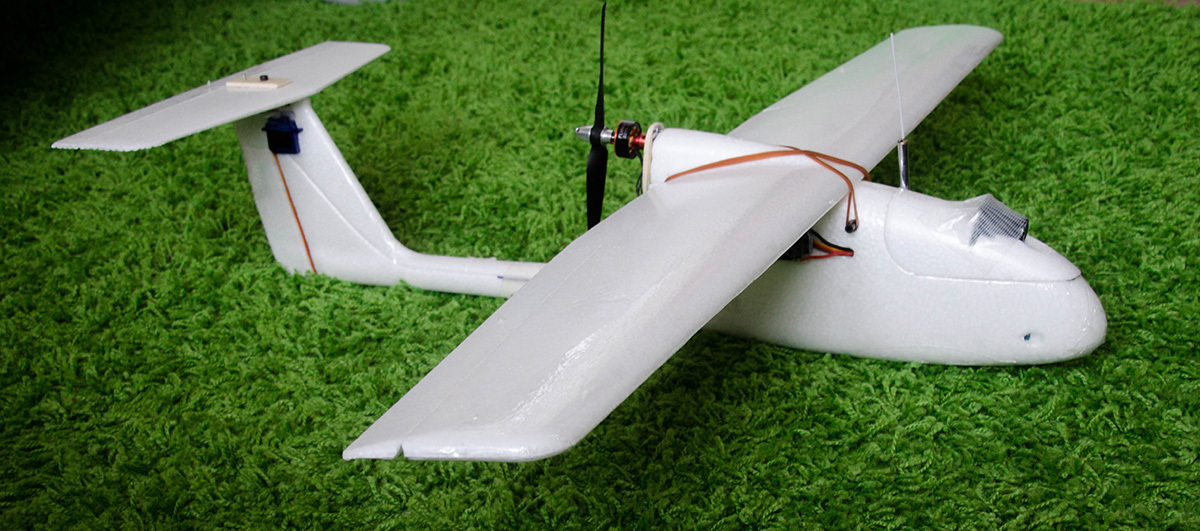
Долго эксперементировал с расположением начинки и остановился на таком варианте:

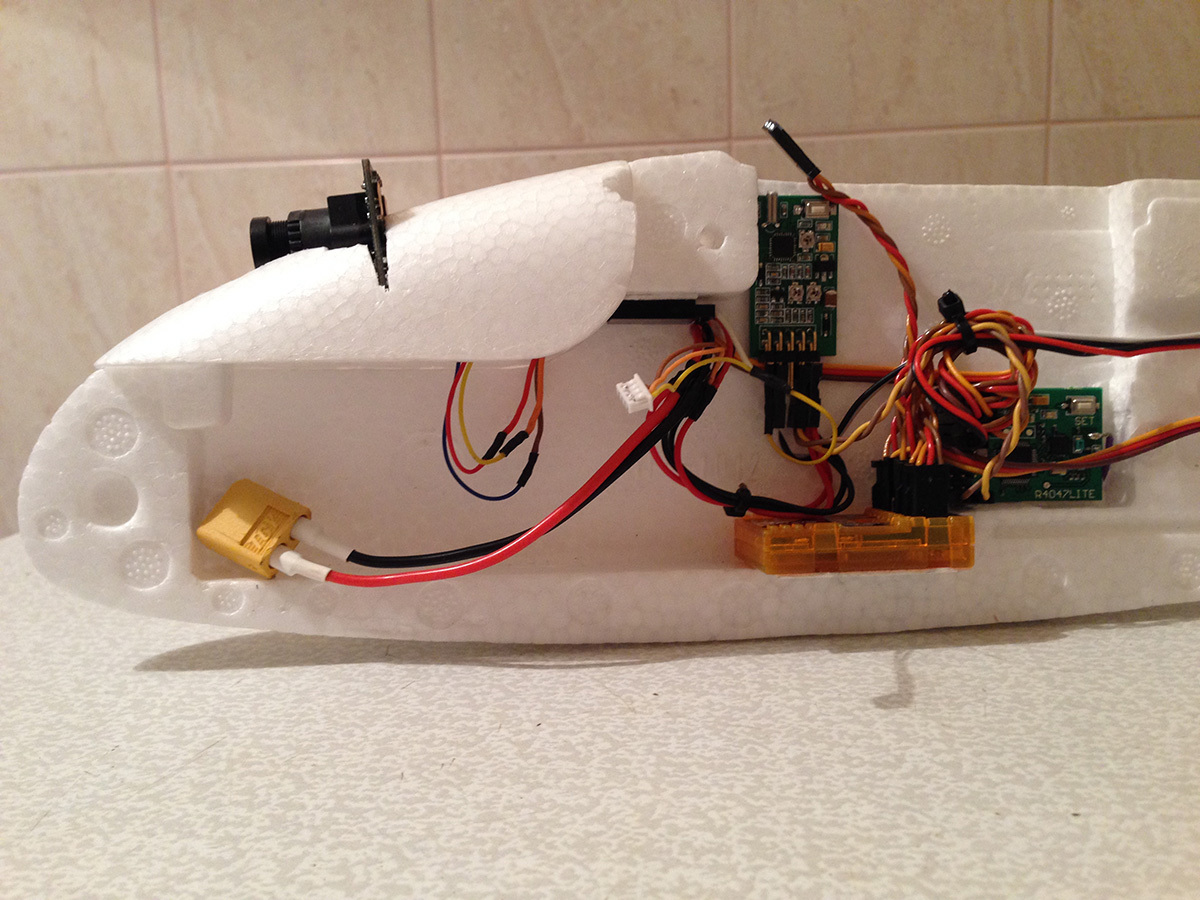
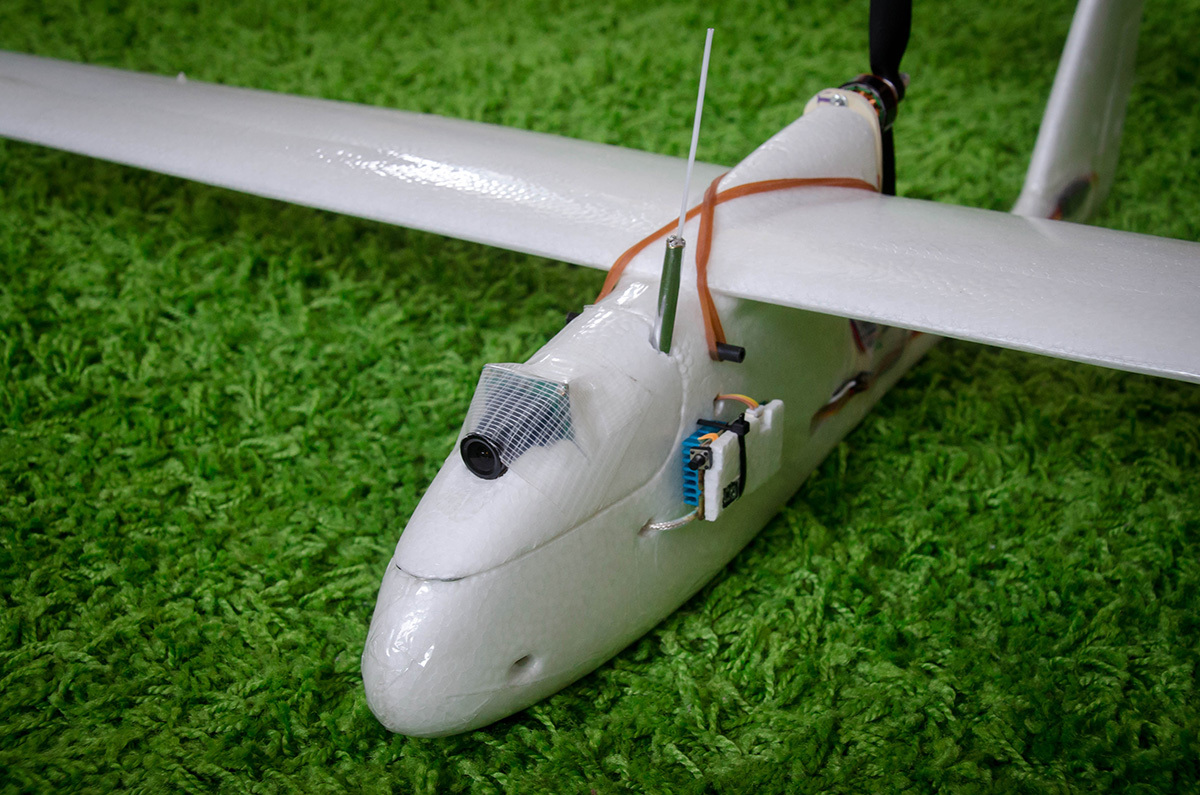
Кстати о камере, хотел чтобы это была достаточно универсальная камера с хорошим качеством. Я везде ставлю “народную” PZ0420 но тут она была бы слишком большой. Очень кстати вышла уменьшенная версия этой камеры – PZ0420M с весьма хорошей ценой, ее и поставил. Кстати, качество картинки не отличается от “большой” версии.
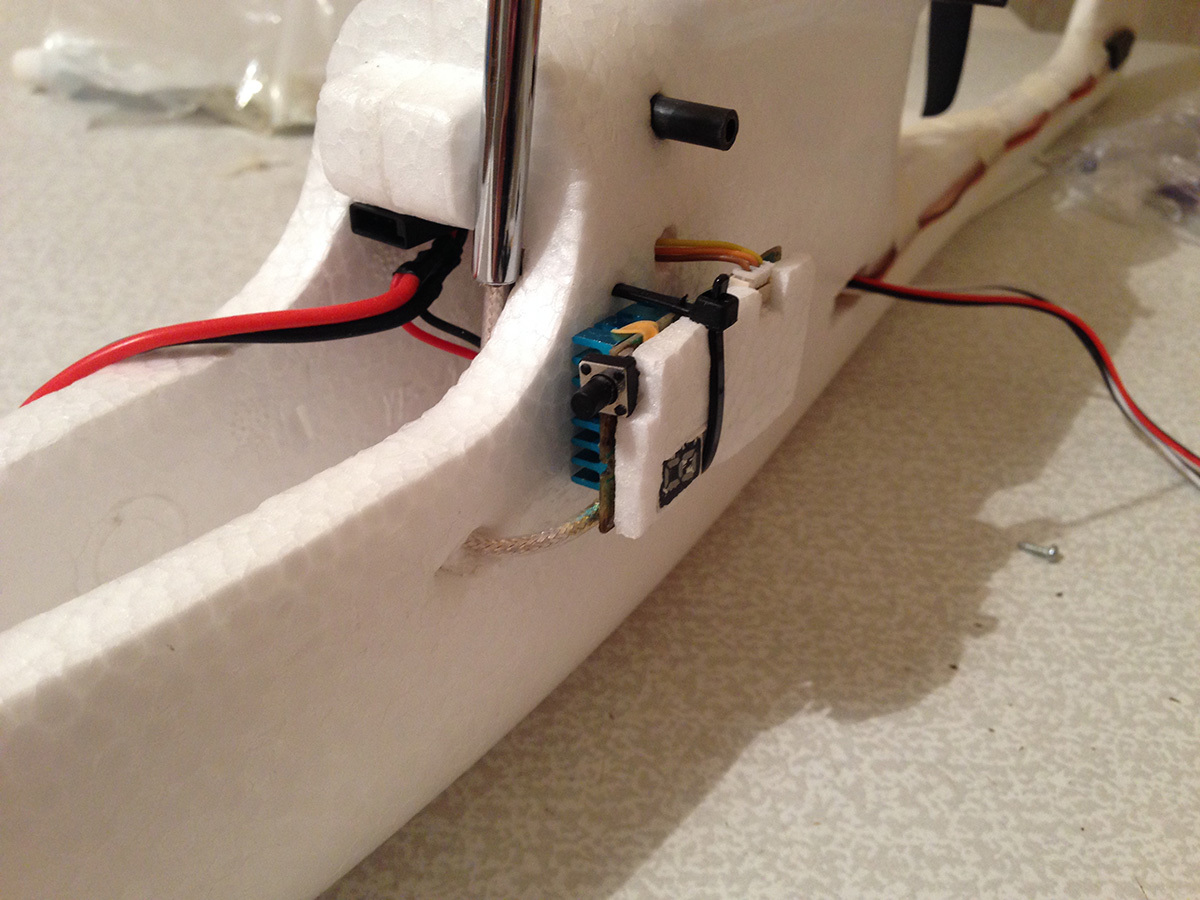
Регулятор был установлен на внешней стороне фюзеляжа т.к. внутри места уже почти не оставалось. Эта же учесть постигла и видео передатчик 1.3G 800mw с bevrc, он достался еще от бикслера… на новый денег уже нет, так что было решено восстановить то что было. А было вот что: после очередного краша у него оторвало антенну вместе с разъемом. Я уже не рассчитывал что он жив т.к. без антенны он проработал не одну минуту еще и была повреждена часть дорожек на плате и я не досчитался одного конденсатора возле центральной жилы антенны. Попытка не пытка, и проследив куда могли вести дорожки, я припаялся к большой черной штуке, которая была вся в термопасе и всегда грелась при работе, добавив хорошую термопасту и установив свой радиатор было произведено тестовое включение… Удивительно, но он работал и даже прошел тест на дальность в 4 этажа через 2 (а может и 3) несущие стены, кирпич и бетон… я просто прошел через всю квартиру и спустился с 9 до 5 этажа, помехи были, но незначительные.
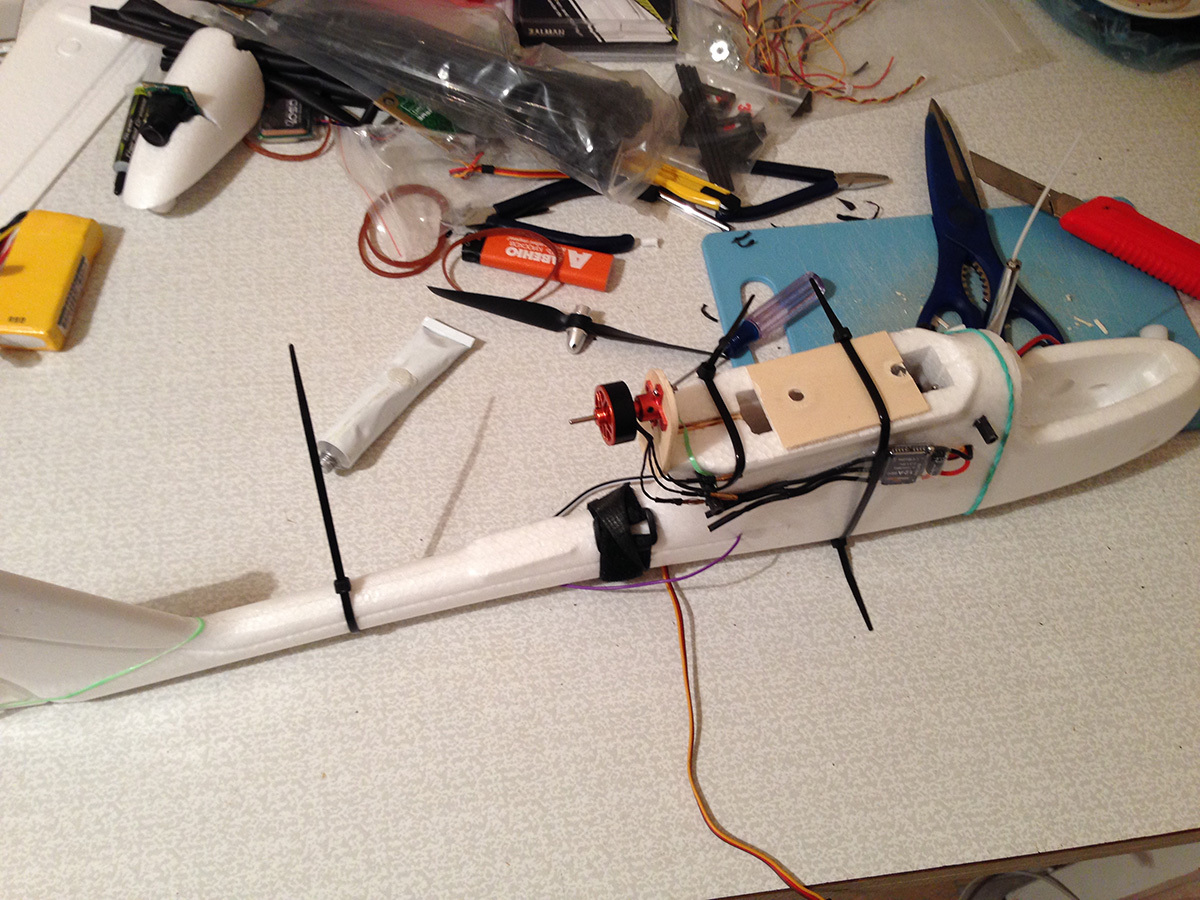
После установки всего оборудования и нанесения клея это выглядело так:
Я был готов к потере спутников из-за видео передатчика и ограниченного размещения gps от osd, проблема имела место еще на бикслере да и не только у меня. К антенне я сразу добавил low pass фильтр, сняв с него разъемы и корпус. Немного не учел размер кабеля до фильтра, передатчик продолжал “глушить” gps, но обрезка кабеля помогла.
Опять же, благодаря отзывам я решил сделать съёмный хвостовой стабилизатор, но пришлось изобретать велосипед: схема схожая с большим скаем – в хвосте фанера с забивной гайкой (тоже М3) но с двумя гайками вес получался слишком большой, по этой же причине я не стал его усиливать. Оставил одну гайку, но чтобы стабилизатор не крутился вокруг болта я добавил металличесую часть от антенны, а в крышке стаба сделал дополнительное отверстие и чтобы пенопласт (вернее EPO) не разболтался я вклеил внутрь стаба трубки, опять же от антенны. Конечно съемный стабилизатор добавил лишний вес, но я старался его минимизировать как мог.



В мотораме я установил дополнительную гайку, чтобы была возможность поставить мотор FC 28-12 (мало ли, вдруг не хватит мощности)
После сборки я решил его заламинировать для большей прочности (хотя это и так очень крепкий самолет) и увеличения веса в передней части самолета т.к. центровка все равно была задняя. Основным грузом нарушающим баланс был gps приемник, который я разместил на хвостовой балке, но выбрать пришлось именно его, т.к. вблизи видео пропадали спутники (даже с фильтром) а по весу он оказался легче. К сожалению это практически не помогло. Для справедливости мне пришлось увеличить вес в передней части двумя болтами с гайками М4.
В итогде самолет получился достаточно тяжелым, но теоритически, если поставить аккум большей ёмкости (я это учел, если посмотреть на размещение электроники) то это должно помочь избавится от болтов, но пока у меня нет такого аккума – пусть будет лишний вес. К сожалению у меня нет достаточно точных весов, так что старался попасть примерно в 400 гр но думаю что получилось больше.
По электронике, все одним списком:
- Аккум: Zippy Compact 1000mah 3S
- Мотор: Turnigy 2211 1700kv (6X3 проп)
- ESC: HobbyKing 12A BlueSeries
- Сервы: 3x HXT500 (без руддера)
- Камера: RunCam 600TVL DC 5-17V (2.8 lens)
- Видео: 1.3G 800mw
- OSD: Mini OSD System w/GPS Module (прошивка u-osd)
- Приемник: RMILEC R4047LITE
- Стабиизация: OrangeRX RX3S 3-Axis Flight Stabilizer V2
В воздухе самолет еще не был, жду хорошую погоду, так что есть время внести небольшие изменения, любой совет будет кстати! Спасибо за внимание)