интересная реализация и мач

А, теперь понятно, это стандартный метод решения на пенорезах. Это то что я предлагал
Есть конечно один вариант механический, закрепить нить с одной стороны, а с другой сделать скользящий подвес и нагрузить подвес что бы висел всегда вертикально… Но как это будет работать, не будет ли оно раскачиваться или сползать при вертикальных перекосах и т.д…
…Это то что я предлагал.
Можно конечно расширить рамку, разнести консоли метров на 10, тогда эти искажения на некрупных деталях будут не сильно заметны…
не так, вся суть как раз в том что программа должна следить чтобы нить проходила через обе точки траектории. т.е. искажений не будет. Но для этого у нее должен быть запас по ширине проволоки. Возможно мы об одном и том же говорим 😃
Есть конечно один вариант механический, закрепить нить с одной стороны, а с другой сделать скользящий подвес и нагрузить подвес что бы висел всегда вертикально… Но как это будет работать, не будет ли оно раскачиваться или сползать при вертикальных перекосах и т.д…
Пусть лучше программа извращается… 😉
…добавить снизу еще два шд…
совсем не понял, куда добавить?
совсем не понял, куда добавить?
смотрим на станок сбоку, наверху слева и справа движки
и один по центру с низу. струны идут звездой (3 луча), сходятся в центре. программно нужно выдерживать постоянный их натяг.
ага, понял, тоже вариант, что плохо - сильно избыточен, 4 степени свободы = 6 приводов
А при чем тут мач то ? Тут надо постпроцессор какой то умный ну и прогу соответстывенно.
Мало кто обратил внимание - но точность обработки профиля у данной штуки будет по центру куда выше чем с краев.
Да и еще такая штука была уже где то только на 2х моторах - как бы половина от этого ее вешали ребята на стену здания сверху а по центру (там где струна) балон с краской и рисовали типа графити но программным путем!
не могу ни как найти пока ссылку - там вроде как и про программу что то было…
А при чем тут мач то ? Тут надо постпроцессор какой то умный ну и прогу соответстывенно.
Возможно что это тоже вариант, но кто проверит?
Мало кто обратил внимание - но точность обработки профиля у данной штуки будет по центру куда выше чем с краев.
Почему же это? 😉
…не могу ни как найти пока ссылку - там вроде как и про программу что то было…
Прикольно, только вот не понятно зачем они там совершают столько ненужных движений? 😕
Тема заглохла?
У этого станка есть одна большая беда. Нельзя вырезать фигуры сложных конфигураций. Например конус с вершиной в центре пролета. Потому что консоли уходят в разные стороны а нить закреплена неподвижно, нет возможности удлиняться как на обычных станках. И консоли начнут сходиться искажая геометрию…Хотя на эти искажения тоже можно внести программные поправки…
А что мешает сделать “удлиняющуюся” нить ?
С одной стороны жестко закрепляем один конец, а с другой, закрепляем через пружинку. Длину и жесткость пружины можно рассчитать, зная необходимое удлинение нити накаливания. Скажем для конуса с основанием диаметром 30 см, пружинка будет удлиняться на 5-7 см. Чем площе конус, тем больше удлинение.
Резание круга как бы мы тут не рассматриваем.
Все не так просто как вам кажется. Сделать удлинняющуюся нить нам мешает гибкий подвес привода…
Все не так просто как вам кажется. Сделать удлинняющуюся нить нам мешает гибкий подвес привода…
Посмотрел еще раз внимательней. Сразу не обратил внимания. Рамка с натянутой нитью как бы свободно может перемещаться в пространстве. Т.е. вертикальная устойчивость рамки обеспечивается ее собственным весом . Тогда всяких пружинок вообще не нужно будет. Расстояние между рабочим столом и рамкой нужно установить около 10 см, что видно на видео. Это позволит держать рамку не только перпендикулярно столу, но и под небольшим углом. В процессе выпиливания конуса, рамка будет приближаться и удаляться от стола, то по горизонтали, то по вертикали.
Что позволит запросто вырезать конус. Единственное, что потребуется сделать, это немного изменить конструкцию катушки на которую будет наматываться тросик, на валу двигателя. Катушка должна быть трапецевидной, чтобы тросик не соскакивал в момент приближения рамки к рабочему столу. И еще, возможно, потребуется одну сторону рамки, при вырезании конуса закрепить со стороны вершины конуса, т.к рамка иначе будет пытаться занять среднее положение между приводами. Как вариант, можно попробовать подвесить гирьку на нижний угол рамки со стороны вершины вырезаемого конуса.
Думаю что все должно получиться.
Ниче не понял из вашего объяснения. Но посоветую провести эксперимент, привяжите к карандашу две ниточки, подвесте, а потом разведите ниточки в стороны. Что получится ? Правильно, карандаш поднимется, тоже самое происходит и с рамкой подвеса. Если не воспрепятствовать физическому схождения точек подвеса из за того что мы “не можем”(простыми способами) регулировать длину нити. То мы получим вот такие искажения…
Захотите вы например вырезать пирамидку вот с таким основанием (зеленым), а она окажется вот такой(красное) да еще и меньшей высоты 😉
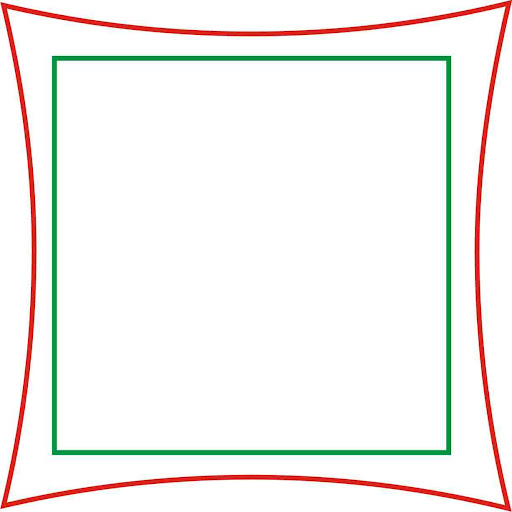
Это можно скомпенсировать программно(легко) или механически насколько это сложно сказать не берусь, но простых решений я не вижу.
Ниче не понял из вашего объяснения. Но посоветую провести эксперимент, привяжите к карандашу две ниточки, подвесте, а потом разведите ниточки в стороны. Что получится ? Правильно, карандаш поднимется, тоже самое происходит и с рамкой подвеса. Если не воспрепятствовать физическому схождения точек подвеса из за того что мы “не можем”(простыми способами) регулировать длину нити. То мы получим вот такие искажения…
Захотите вы например вырезать пирамидку вот с таким основанием (зеленым), а она окажется вот такой(красное) да еще и меньшей высоты 😉Это можно скомпенсировать программно(легко) или механически насколько это сложно сказать не берусь, но простых решений я не вижу.
Хм, а зачем дергать за ниточки одновременно ? Надо по очереди и иногда даже одну поднимать, а другую опускать. Тогда будет траектория, которая нужна. Вас же не удивляет, как станок с ЧПУ делает диагональ или круг.
Просто в этом станке нет жесткой опоры оси Х и Y, но эта жесткость компенсируется весом рамки. Либо, как вариант, можно установить на полу 2 двигателя и присоединить тросиками к точке крепления на рамке. Тогда можно было бы контролировать всю вертикальную плоскость вне зависимости от веса рамки, создавая постоянный натяг.
Смысл весь в том что у нас отсутсвует жесткость по оси Z что при постоянной длине нити и разнонаправленном движении консолей (скажем x1 уехал на +30, а x2 на -30) то получится вот так.
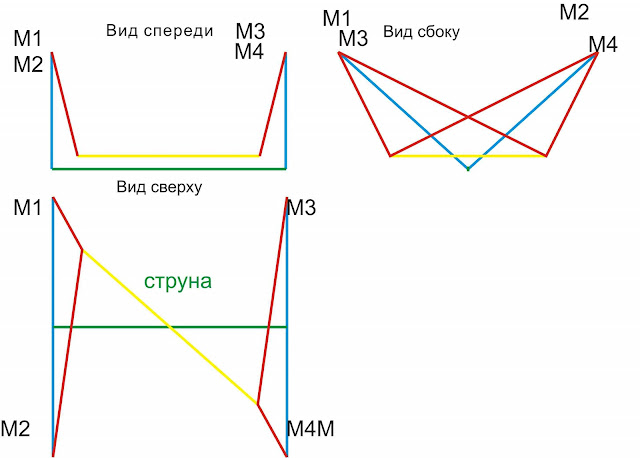
Как мы видим точки подвеса на виде спереди/сверху сходятся вызывая подьем нити и изменение координат по y1y2 вместо того что бы они остались на прежнем месте.
Да согласен что введя 3тий мотор снизу и создав натяг в плоскости консоли мы сможем увеличить жесткость по оси Z и даже повесить скользящую нить, но для этого натяг должен быть достаточно сильным и тд что ведет к неоправданному усложнению всего станка.
Эти искажения проще всего устранить программно, но это так же накладывает некоторые ограничения.
Эти искажения проще всего устранить программно, но это так же накладывает некоторые ограничения.
Конечно, это делать проще программно. Тут механикой делать ничего не надо.
Это как круг вырезать. Даже тот же треугольник, надо вносить поправки по 2-м осям.
А изменять механику нет смысла.