MultiWii

omegapraim, голую плату покупал тут gapey.narod2.ru . продавец схемы не прислал, только расположение деталей и номиналы. плату еще не проверял. схема на первый взгляд типовая, за основу взято www.pial.net/image.axd?picture=2011%2F4%2Fschemati… (возможны небольшие отклонения, я не выверял, но вроде сходится)
Вот есть #define MOTOR_STOP
есть #define MINTHROTTLE 1150
первое отменяет любые цифры во втором я так понял.
кто как использует ? Вроде бы и виднее что произошел арминг/дизарминг, а иногда бы и не надо чтоб крутились лопасти в ноле.
у кого как настроено ? кому как удобнее ?
Вот есть #define MOTOR_STOP есть #define MINTHROTTLE 1150
MINTHROTTLE 1150 Это минимальное значение при которм мотор еще устойчиво работает. Т.е. меньше которого при стабилизации и управлении программе опускать нельзя. Если эту цифру сильно уменьшить или “отменить”, коптер будет опрокидываться.
MOTOR_STOP - это останавливать моторы при минимальном положении стика газа (т.е. меньше MINCHECK). способ быстро останавливать моторы.
Но это сродни самоубийству - достаточно случайно стик газа задеть и…
Я на своем хочу сделать так
газ в минимум и переключателем Dual Rate во вкл, тока руки все не доходят. И канал лишний не жрется и отключить можно моментально, и стик случайно не заденешь.
У меня такая проблема.Моторы работаю не синхронно.Точнее газ на каждом моторе разный при старте.Задний левый отстает больше всех из-за этого квадрик неможет взлететь без акселя ,сразу переварачивается.Если взять в руки и плавно поддавать газку то видно как квадр валится постоянно на левый задний мотор. Думал может из-за прошивки 1.8 залил только что 1.9 ,такаяже беда.На видео видно как как газ отстает особенно левый задний (звыняюсь за качество снимал на телефон).Как это побороть??
С акселем летает нормально ,периодически малехо потрухивает его как с этим бороться пока не знаю.
Моторы работаю не синхронно.
откалибровать регули пробовали?
откалибровать регули пробовали?
Да.Но причем тут регули если в самой проге до регуляторов такая беда.
попробуйте откалибруйте каждый регулятор подключив к приемнику на прямую
зы о, уже ответили )
Да.Но причем тут регули если в самой проге до регуляторов такая беда.
вы описали проблему, предоставив как вам кажется верные данные в виде видео фрагмента
делайте то, что вам говорят 😃
попробуйте откалибруйте каждый регулятор подключив к приемнику на прямую
зы о, уже ответили )
вы описали проблему, предоставив как вам кажется верные данные в виде видео фрагмента
делайте то, что вам говорят 😃
Откалибровал регуляторы подключяя по отдельности к приемнику.Газ на всю,включаю питание регуля ,пили-пили,ручку вниз,пили-пили. Яж говорю трижды откалибровал,причем тут регули и то что выдает прога непонятно.Проблема в том что в проге газ не синхронный при условии того что коптер стоит на полу с отключенными регуляторами но включенными мозгами и соответственно неподвижно.
Проблема в том что в проге газ не синхронный при условии того что коптер стоит на полу с отключенными регуляторами но включенными мозгами и соответственно неподвижно.
Без обратной связи(т.е. коптер не летит) в столбиках газа в проге может быть что угодно. Могу посмотреть что на моем, в таких условиях, показывает.
Чудес то не бывает.
#ifdef QUADX
motor[0] = rcCommand[THROTTLE] - axisPID[ROLL] + axisPID[PITCH] - YAW_DIRECTION * axisPID[YAW]; //REAR_R
motor[1] = rcCommand[THROTTLE] - axisPID[ROLL] - axisPID[PITCH] + YAW_DIRECTION * axisPID[YAW]; //FRONT_R
motor[2] = rcCommand[THROTTLE] + axisPID[ROLL] + axisPID[PITCH] + YAW_DIRECTION * axisPID[YAW]; //REAR_L
motor[3] = rcCommand[THROTTLE] + axisPID[ROLL] - axisPID[PITCH] - YAW_DIRECTION * axisPID[YAW]; //FRONT_L
Вот это идет на моторы и передается в прогу, если коптер не подвижен и гирик не дрейфует, 3 кранийх слагаемых будут равны нулю.
Откалибровал регуляторы подключяя по отдельности к приемнику
Я перед первым полетом, запараллелил все регули и подключил напрямую к приемнику. Убедившись в полной синхронности работы всех регулей и моторов(ну и главное включил в настройках “торомоз” на всех регулях) спокойно стал взлетать.
достаточно ли для проверки адруины и платы с датчиками? соединил их по схеме, прошил ардуину, в консоли тишина. утилита для настройки ниче не показывает, просто серый квадрат. моторы и пульт пока не подключаю. или надо?
достаточно ли для проверки адруины и платы с датчиками?
да.
выбираем ком порт. Зеленеют комп порт и кнопки Старт и Стоп
Ждем 5 сек и жмем “Старт”
Могу посмотреть что на моем, в таких условиях, показывает.
Если не трудно с отключенной стабилизацией только гиры.Квадр ровненько на полу.
Вот это идет на моторы и передается в прогу, если коптер не подвижен и гирик не дрейфует, 3 кранийх слагаемых будут равны нулю.
Гирик судя по проге даже не шевелится стоит как вкопанный по нулям все три оськи.
Я перед первым полетом, запараллелил все регули и подключил напрямую к приемнику. Убедившись в полной синхронности работы всех регулей и моторов(ну и главное включил в настройках “торомоз” на всех регулях) спокойно стал взлетать.
Попробую я так сделать.Свои я по очереди настраивал.Но кажется мне это не причем.Если ардуина на выходе дает несинхрон то хоть запрограмируся с этими регулями…
выбираем ком порт. Зеленеют комп порт и кнопки Старт и Стоп Ждем 5 сек и жмем “Старт”
у меня нет старт или стоп. окно = просто серый прямоугольник 😃 буду переставлять джаву. спасибо.
Ставлю коптера на пол. Акум не подключен. Только Ардуина от УСБ и приемник.
Гиры по нолям. Но если АСС не ноли то столбики движков будут подниматься не равномерно
после CALIB_ACC столбики поднимаются равномерно
Если ардуина на выходе дает несинхрон то хоть запрограмируся с этими регулями…
Если гирик дает нули, должно быть синхронно. Достаточно чуть качнуть на полу квадрик(ну за шнур там дернуть), будет не синхронно, до новой калибровки гирика. Сегодня еще раз проверю как по факту, но на память так. А Throttle PID attenuation точно 0? с ним мой не кувыркался, но раскачивался если убавлять и добавлять газ. Если я правильно выкурил исходники… Это как бы множитель который увеличивает коэффициенты PID пропорциональна газу.
Хотя у меня все же вертолетный опыт есть, может я его “руками” ловил.
И Вы когда взлетаете правую ручку не дергаете? Если дергать - исправный и настроенный кувыркнется.
И Вы когда взлетаете правую ручку не дергаете?
Не это точно не трогаю за исключением когда пытаюсь компенсировать провал левого заднего двигателя но так летать не реально.
Если гирик дает нули, должно быть синхронно
В том то и дело что в проге стоят нули и никаких движений пока коптера не тронешь
до новой калибровки гирика.
Вот тут я наверно чет я пропустил.Аксель калибровал с этим разобрася все понятно,а вот гирик я так понял он автоматом после включения илиже гиру тоже нужно калибровать??
буду переставлять джаву. спасибо.
переустановка джавы не помогла.
если отключить ардуину, то конфигуратор думает секунд 20 и показывает свое окно. ком порта выбрать не дает разумеется.
если подключить ардуину, то конфигуратор так же думает секунд 20, потом на долю секунды прорисовывает свое окно а потом появляется серый прямоугольник.
кто-нибудь пользуется сабжем на ардуине mega 2560 uno? проблем нет? или например на 328 uno?
upd отключение аппаратного ускорения видеокарты помогло
Аксель калибровал с этим разобрася все понятно,а вот гирик я так понял он автоматом после включения илиже гиру тоже нужно калибровать??
Автоматом после включения, но квадрик можно не успеть ровно поставить.
www.multiwii.com/#Gyroscopes_calibration
Автоматом после включения, но квадрик можно не успеть ровно поставить.
www.multiwii.com/#Gyroscopes_calibration
С инглишом туговато а переводчик бред какойто несет,по нашему как это будет 😃 :
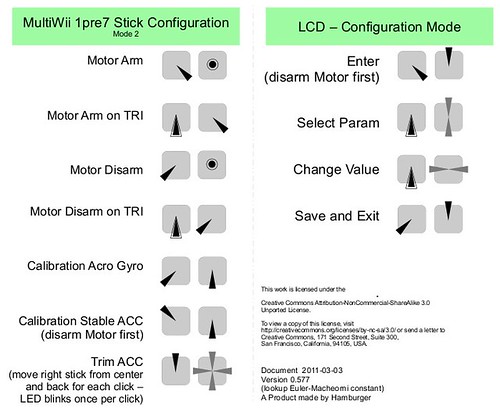
Gyroscopes calibration
To calibrate the neutral of gyroscope sensors, you must tilt the yaw stick left, tilt the pitch stick back while having the throttle stick in minimal position.
The multicopter should not move during this stage. However its inclination has no influence.
The status LED will blink to confirm this step.
Accelerometers trim
With the help of your roll and pitch stick you could now trim the ACC mode.
You must first put the throttle stick in maximal position. (obviously with motors disarmed)
full PITCH forward/backward and full ROLL left/right (2 axis possibilities) will trim the level mode according to the neutral angle you want to change.
The status LED will blink to confirm each ticks.
Может кто сможет пояснить про компас что в комплекте платки алл-ин-оне (HMC5883L Triple Axis Magnetometer) ???
Залил в Ардуинку версию 1.9.
Выбрад #define ALLINONE
ориентация в блоке #if defined(ALLINONE) такая:
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -Y; magADC[PITCH] = X; magADC[YAW] = Z;}
Но все равно в конфе полная фигня. Компас поворачивается совсем не так как я кручу по часовой и против коптер на полу.
Поставил коптер ровно. на рисунке стрелка в N, HEAD около 0.
Поворачиваю коптер на 90гр по часовой стрелке, стрелка развернулась на 180 гр и показывает S, HEAD уже -174
поворачиваю коптер еще на 90 гр по часовой, стрелка между W и S. HEAD показывает -128
поворачиваю коптер еще на 90 гр по часовой, стрелка зашла за W, HEAD показывает -74
доворачиваю коптер до 1 оборота. Стрелка в N, Head около 0.
так у всех ?
С инглишом туговато а переводчик бред какойто несет,по нашему как это будет :
Пока гирик калибруется, на ардуимнке моргает светодиод.