Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

… чем городить противовесы и консольно грузить подшибники моторов, думаю лучше придерживаться традиционной схемы.
… чем городить противовесы и консольно грузить подшибники моторов, думаю лучше придерживаться традиционной схемы.
удивитека нас, а то может парни чтото не знают и все поголовно делают не правильно во главе с джидаями , вы классический маятник никогда не заставите работать , так как проблемы с креном будут 100проц
… да ничего удивидельного,если есть возможность отказаться или хотя бы уменьшить число консольно висящих масс,то почему бы этим и не воспользоваться? одно дело гоупрошку подцепить,а другое, зеркалку. тут малейший люфт в подшибниках к расколбасу приведет. Ну да,если дизайн первичен,то можно и поизвращаться…
Мне кажется ат2216 будет предпочтительнее www.rctigermotor.com/show.php?contentid=128 не реклама. На нем вал длинный и торчит с хади, что упростит схему с обратным монтажем с противовесом.
если есть возможность отказаться или хотя бы уменьшить число консольно висящих масс,то почему бы этим и не воспользоваться? одно дело гоупрошку подцепить,а другое, зеркалку. тут малейший люфт в подшибниках к расколбасу приведет. Ну да,если дизайн первичен,то можно и поизвращаться…
бл я вас не понимаю , от чего вы хотите отказаться или уменьшить , есть как минимум 2 оси крен-тангаж и там и там нужно балансировать подвес , если у вас по тангажу с одной стороны висит мотор то с другой стороны мужен противовес тогоже веса как и мотор , можно конечно сбалансировать камерой , но тогда оптика не будет в оси вращения подвеса .
вот кстати как я вижу ось вращения по крену , на моторе ничего не висит и есть промежуточная ось
…Владимир, Вы действительно меня не понимаете ). речь о том,что если есть возможность площадку с камерой установить на Две опоры ( с двух сторон), то зачем делать один подшипниковый здоровенный консольный узел? только и всего. Вы ведь сами исправили ту картинку,добавив вторую опору.
я не исправлял , я так и планировал. это задняя ось крена так как она самая нагруженная на ней нужна ось полюбому иначе весь вес будет висеть на подшипниках мотора , на осях тангажа достаточно мотора как ось при условии что сдругой стороны есть опора .
но тогда оптика не будет в оси вращения подвеса .
Все можно сбалансить и без противовеса, вот пока без контроллера с идеальной балансировкой.
не в обиду но вы хоть почитайте о чем мы тут собственно пишем , и сравните фотки из 23 поста хотя бы со своим. у вас так то с противоположной стороны есть противовес и ось вращения тоже
и так задача как сбалансировать такой подвес по оси крен не сбив оптическую ось камеры ??
Ответ - Никак
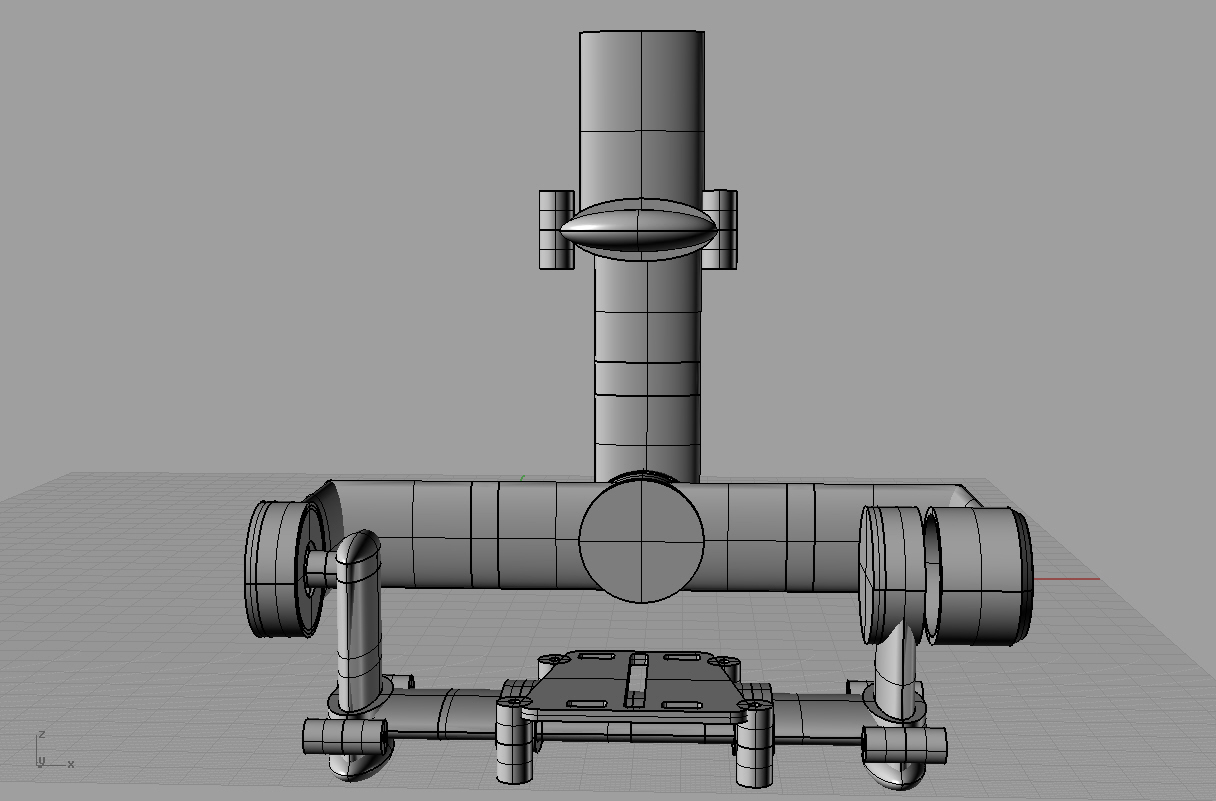
Как считаете такой вариант лучше?
[IMG]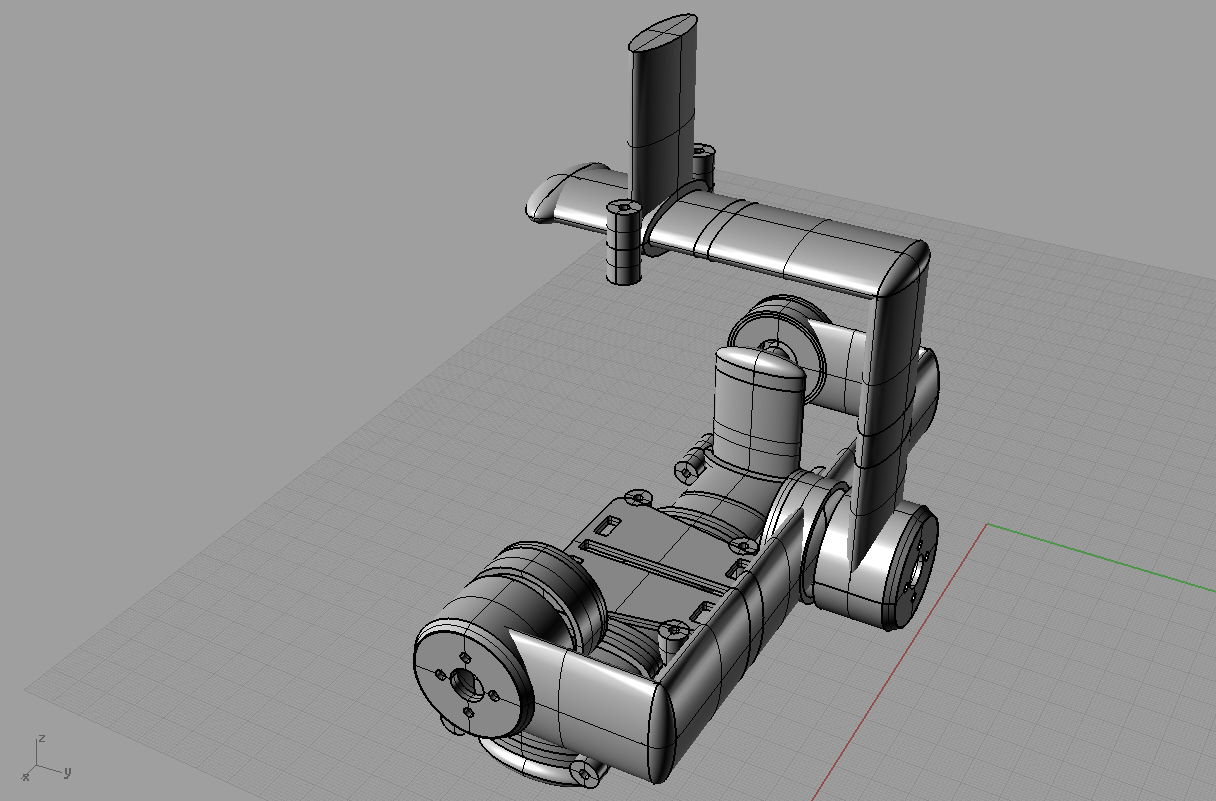 [/IMG]
[/IMG]
[IMG] [/IMG]
[/IMG]
[IMG]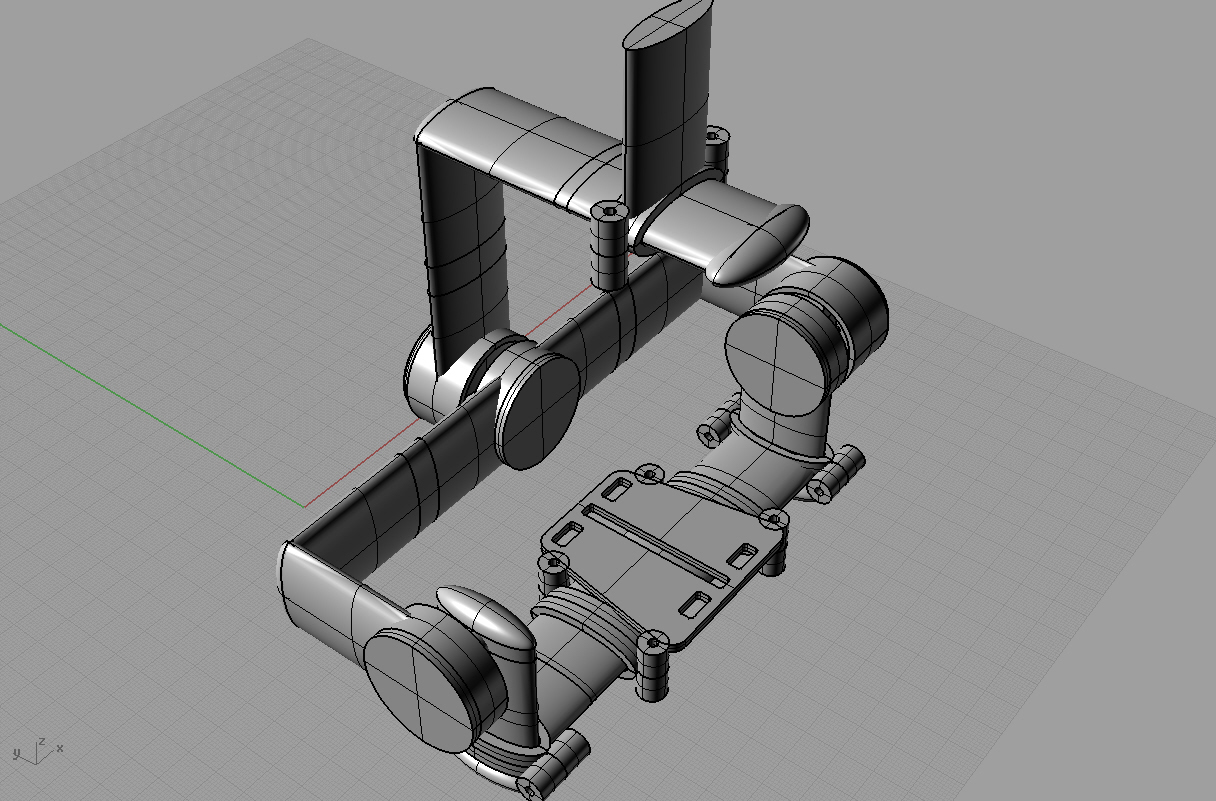 [/IMG]
[/IMG]
у вас так то с противоположной стороны есть противовес
Нет никакого противовеса, просто пластинка для большей жесткости. Без камеры резко заваливается все в сторону мотора.
и так задача как сбалансировать такой подвес по оси крен не сбив оптическую ось камеры ??
Ну видеокамеры сейчас редко возят, в основном фотоаппараты. А с фотиком легко сбалансить.
И еще вопрос, зачем оптическую ось ставить точно в центр оси ролла? Если подвес удерживает камеру в горизонте, то оптической оси пофиг где ей быть
другое дело , желательно что бы вот эта ось двигалась влево-вправо , и вращалась верх-вниз . как показала практика настройки на подвесах синестар эту ось приходилось поднимать чтобы сбалансировать крен
И еще вопрос, зачем оптическую ось ставить точно в центр оси ролла? Если подвес удерживает камеру в горизонте, то оптической оси пофиг где ей быть
это вопрос не мне , я сам всегда так утверждал и меня постоянно пинали за это 8)))) если оптику сбивать то все гораздо проще получается я б тогда делал как Слава без поддержки гангажа на блок моторе
Как считаете такой вариант лучше?
[IMG][/IMG]
скажите, а из какого материала планируете изготовить такую красоту?
Блин , запарело все , пойду куплю Z15 8)))
Сначала на 3D принтере из PLA пластика, далее посмотреть хочу что получится по весу и т.п и если не устроит, то буду использовать как матрицу и делать из карбона.
скажите, а из какого материала планируете изготовить такую красоту?
Считаю что большая часть так именно и сделала бы, если бы не 119 штук)))
Блин , запарело все , пойду куплю Z15 8)))
Всем привет, вот начертил подвесик по размера подойдет как для goprо, так и для sony Nex-5
Слава, не стоит публиковать кучу однотипных рисунков. Оставьте ссылку - кому будет интересно зайдет посмотрит. Ваших два поста заняли почти страницу форума.
К тому же первые варианты совершенно безграмотны с точки зрения конструктива. И Владимир Вам верно все указал…
Сопромат рулит! Сплющеные детали славы будут на кручение никакие;)
Сопромат рулит! Сплющеные детали славы будут на кручение никакие;)
+1 !!!😒
Круглая труба, на мой взгляд, самый лучший вариант!
Про возможность настроек и технологичность я вАще молчу!😉
Фигня все, оптическая ось камеры по ролу должна совпадать только в исключительных случаях к нашим подвесам это не относится. Если я не прав, поправъте меня.
Шпионское фото из Питерского КБ:
Кстати а что за моторки?
3D принтере из PLA пластика, далее посмотреть хочу что получится по весу
Не сильно надейтесь на 3D печать. Те овалы, которые в чертеже заданы получатся конечно, но не так красиво как нарисовано. И по прочности PLA слабоват для подвеса, даже если 100% плотность печати зададите. Да и для матрицы такая распечатка очень сомнительна . Не представляю, как вы потом будете выклейку с такой угловатой формы снимать.
Да и для матрицы такая распечатка очень сомнительна . Не представляю, как вы потом будете выклейку с такой угловатой формы снимать.
вот я об этом же подумал, слишком сложная геометрия
Народ, давайте хорошую тему в очередную помойку не превращать?!
Шпионское фото из Питерского КБ
Помогите идентифицировать моторчики.
Также мне не совсем понятно какой сигнал подается на эти двигатели: Они управляются по принципу шаговых двигателей? Если по принципу шаговых двигателей, то почему нету дрожания камеры? Это за счет высокой частоты обработки данных поступаемых с гироскопа? Но у гироскопа же есть погрешность получаеммых данных. Какой драйвер использовать для этих двигателей? Есть ли что-то похожее реализованное с помощью ардуинки?
Вообщем очень много вопросов 😃 Буду очень благодарен за ответы. Особенно интересует логика работы такого подвеса и кодярничек на C/C++, чтобы не изобретать велосипед 😃
Вообщем очень много вопросов Буду очень благодарен за ответы. Особенно интересует логика работы такого подвеса и кодярничек на C/C++, чтобы не изобретать велосипед
Ну для начала почитайте первый пост. Там есть все ссылки на ваши вопросы.