Hubsan Zino RTF - H117S

Всегда ли то, что есть у Мерседеса, ДОЛЖНО быт ь и у Хундая ?
Извините, но это программная доработка, не аппаратная. И я не считаю, что это нечто сложное, интеллектуальные режимы намного сложнее в реализации, чем возможность указания высоты при возврате домой, причём в этом и сам Хабсан должен быть сильно заинтересован
Вы хотели сказать о длительном хранении ?
40 дней дороги в Россию, плюс од Хубсана в Banggood, это не длительное хранение? Разрядка даже кратковременная ниже 3,0v на банку это убийство банки.
Ярослав, при первом твоем видео а полете вдаль, коптер все время сносит вправо, но направление 68 град. не меняется
У тебя правый стик в тангаже на 100% и в 0% крена, гироскоп коптера видит 19 град. тангажа и при этом у тебя идет крен вправо на 4 град., хотя правый стик не соершает крен !!!
У тебя там что, всегда сильный ветер ?Всегда ли то, что есть у Мерседеса, ДОЛЖНО быт ь и у Хундая ?
Нет, ветер не всегда такой у меня) но то что коптер разворачивало изначально, хотя стик находился по направлению вперёд, я заметил сразу и кстати не у меня одного его так разворачивает при полете вперёд…
Извините, но это программная доработка, не аппаратная. И я не считаю, что это нечто сложное, интеллектуальные режимы намного сложнее в реализации, чем возможность указания высоты при возврате домой, причём в этом и сам Хабсан должен быть сильно заинтересован
Все верно. В программе у Хабсана установлена минимальная высота возврата 10 метров, но если коптер находится выше, для чего он должен спускаться ниже. Он с актуальной высоты полета возвращается к месту взлета и уже потом ничинает вертикальный спуск вниз.

Все верно. В программе у Хабсана установлена минимальная высота возврата 10 метров, но если коптер находится выше, для чего он должен спускаться ниже. Он с актуальной высоты полета возвращается к месту взлета и уже потом ничинает вертикальный спуск вниз.
Я прекрасно знаю, как работает RTH. Просто в данном конретном случае было бы лучше, если бы он сначала опустился до заданной высоты RTH.
Тут вот какое умозаключение имеется:
Обратите внимание на Yaw с 2:17. В 2:17 Yaw показывает 13-почти строго на север. После этого дрон поворачивает к западу, но Yaw не меняется. На 3:15 дрон смотрит почти строго на северо-запад на зашедшее солнце, но Yaw все те же 13, хотя минутой раньше на 2:08 почти в том же направлении Yaw показывал 313. Явно после 2:17 компас перестал правильно работать После этого дрон был практически проговорен к улету, т.к. firmware явно отдает приоритет показаниям компаса для выбора направления движения, несмотря на расхождение с данными GPS по положению и направлению…
Ярослав, у коптера раньше начались проблемы (с 0:50). Уже при подъеме на 85 метров, коптер плавно разворачивался влево.
Далее, на 85 метрах ты начал изменять настройки видео, а коптер продолжал вращение влево.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw. Промелькнула мысль, что может это камерой Вы крутите, но в конце второго дрейфа понял что это не так.
У меня тоже улетал квард (H501M) осенью. Из-за показаний компаса, влияющих на Yaw.
Вот тут описывал: rcopen.com/forum/f135/topic518172/959
Сейчас придумываю способы избавиться от этого дрейфа.
Прошивки полетного контроллера Zino и H501M максимально похожи, это уже на форуме писал. Соответственно болячки H501M перекочевали в Zino.
Но в прошивке 1.1.47 увидел максимальные изменения в части работы с компасом. В 1.0.47 их меньше. Из этой прошивки попробовал пару маленьких блоков чтения регистров компаса для моего H501M. Но от дрейфа Yaw это не помогло пока избавится.
Затем попробовал абсолютно иной компас, привязал его в прошивке, но не помогло, т.е. дело в программе.
Пару недель назад писал на вашем форуме про эксперимент с компасом:
rcopen.com/forum/f135/topic528749/1074 , но на просьбу провести такой эксперимент никто не ответил. Это помогло бы лучше разобраться в проблеме.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw. Промелькнула мысль, что может это камерой Вы крутите, но в конце второго дрейфа понял что это не так.
У меня тоже улетал квард (H501M) осенью. Из-за показаний компаса, влияющих на Yaw.
Вот тут описывал: rcopen.com/forum/f135/topic518172/959Сейчас придумываю способы избавиться от этого дрейфа.
Прошивки полетного контроллера Zino и H501M максимально похожи, это уже на форуме писал. Соответственно болячки H501M перекочевали в Zino.
Но в прошивке 1.1.47 увидел максимальные изменения в части работы с компасом. В 1.0.47 их меньше. Из этой прошивки попробовал пару маленьких блоков чтения регистров компаса для моего H501M. Но от дрейфа Yaw это не помогло пока избавится.
Затем попробовал абсолютно иной компас, привязал его в прошивке, но не помогло, т.е. дело в программе.
Пару недель назад писал на вашем форуме про эксперимент с компасом:
rcopen.com/forum/f135/topic528749/1074 , но на просьбу провести такой эксперимент никто не ответил. Это помогло бы лучше разобраться в проблеме.
Почитал вашу историю, ситуация один в один схожа с вашей… У него даже траектория полёта в начале такая же( круги описывал - туалет) была как у вас, судя из протокола полёта… Вот тебе и компас… Я на своём чирсоне с такими проблемами ни когда не сталкивался, один раз откалибровал всё и забыл, а тут…
Настоятельно рекомендую, перед первым запуском откалибровать компас и гироскоп в домашних условиях, а заодно проверить как коптер передает телеметрию на пульт (экран смартфона).
Просто вращайте коптер на месте и смотрите на угол поворота в программе, наклоняйте и смотрите на угол крена или тангажа.
Все должно отображаться своевременно, без тормозов и зависаний.
то что коптер разворачивало изначально, я заметил сразу и кстати не у меня одного его так разворачивает при полете вперёд…
Калибровки кампаса делал ? Выходит, что дело не в прошивке, а в железе. Коптер то еще “сырой”.
Вот это и является основанием для претензии к продавцу.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw.
Хочется понять, что же считается дрейфом, а что рысканьем ?
Поворот аппарата вокруг своей вертикальной оси - это рысканье.
Тут надо отделить мух от варенья, а именно:
Коптер совершает постоянное плавное вращение влево.
Вращение влево осуществляется легким подтормаживанием переднего правого (А) и заднего левого (А) моторов.
Может быть, что все 4 мотора вращаются одинаково, но лопасти “А” имеют иную тяговую силу, при одинаковом вращении лопастями “В”, но почему тогда компас этого не видит и не дает команду на выравнивание ?
А может быть все наоборот, компас видит вращение вправо и дает команду на вращение влево ?
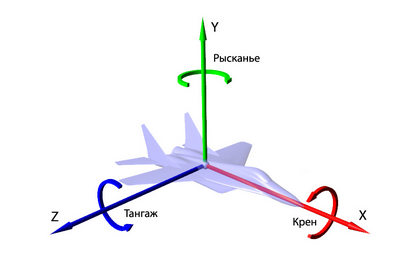
В квадриках мы называем это питч, ролл и яв )))
И да, калибровать компас дома - это плохая идея.
Калибровки кампаса делал ? Выходит, что дело не в прошивке, а в железе. Коптер то еще “сырой”.
Вот это и является основанием для претензии к продавцу
Какие претензии, уважаемый? Продавцу ваши размышления и теории заговора глубоко по барабану. Что ему можно предоставить? Видео? Так на основании этого видео любой скажет, что дрон унесло ветром
Хочется понять, что же считается дрейфом, а что рысканьем ?
Конечно рысканье, я имел в виду дрейф ( в смысле самопроизвольное изменение) этого параметра, т.е. самопроизвольное вращение против часовой стрелки.
Если в этот момент коптер зафиксировать, то рысканье Yaw уменьшись бы самопроизвольно.
В квадриках мы называем это питч, ролл и яв )))
Это англоговорящие люди их так называют. Вы же не называете свою машину “каром”. Хотя, кому как удобно )))
А в нашей русскоязычной авиации есть перевод.
Pitch - Тангаж
Roll - Крен
Какие претензии, уважаемый?
Сорян, не знал, что у вас есть судимость …
Сорян, не знал, что у вас есть судимость …
Вы о чём, вообще ?
Вы о чём, вообще ?
А Вы о чем, Виталий ?
P.S. У всех подписаны Имена и необязательно называть людей оценочными прилагательными.
Если в этот момент коптер зафиксировать, то рысканье Yaw уменьшись бы самопроизвольно.
В воздухе этого не сделаешь…
А параметр YAW на пульте это просто указатель поведения коптера.
Можно Вас (владельцев ZINO) попросить провести 2 эксперимента?
Поверните коптер на 90 градусов вправо (по часовой стрелке), и удостоверьтесь что через 1 минуту простоя коптера в новом положении Yaw тоже будет показывать на 90 градусов больше. Т.е. проверяем уплывает ли Yaw и правильность калибровки.
Немного, градусов на 20…30 наклоните коптер носом вперед, и тут важно чтобы в течении 1 минуты показания Yaw оставались неизменными. То же проверяем уплывает ли Yaw.
Можно предположить, что никто из владельцев ZINO этого эксперимента не проводил ?
Немного, градусов на 20…30 наклоните коптер носом вперед, и тут важно чтобы в течении 1 минуты показания Yaw оставались неизменными…
При этом коптер улетит на какое расстояние?
Или не в полёте?
И да, калибровать компас дома - это плохая идея.
Я неправильно выразился. Имелась ввиду проверка показаний положения коптера в пространстве в домашних условиях, если нет возможно сделать это на улице.
При этом коптер улетит на какое расстояние?
Это делается на земле, с заглушенными винтами.
Дома включите пульт и коптер, а потом начинайте вращать коптер по разному и смотрите на пульт, речь об этом.
А Вы о чем, Виталий ?
P.S. У всех подписаны Имена и необязательно называть людей оценочными прилагательными.
Я про судимость не понял. Извините, не являюсь носителем языка…
Я про судимость не понял. Извините, не являюсь носителем языка…
Виталий, у нас в России,обращаются к незнакомым людям, называя их Уважаемый, обычно бывшие сидельцы, потому что в тех местах так принято.
Обычные люди, не зная Имени человека обратятся: “Товарищ”, “Молодой человек”, “Мужчина”, “Гражданин” и т.д."
А у нас то на форуме, у всех есть Имена )))
Это англоговорящие люди их так называют. Вы же не называете свою машину “каром”. Хотя, кому как удобно )))
А в нашей русскоязычной авиации есть перевод.Pitch - Тангаж
[B]Roll - Крен…
Именно питч, ролл и яв - квадрокоптерный сленг.
А тангаж, крен и рыскание - самолетная тема.
Виталий, у нас в России,обращаются к незнакомым людям, называя их Уважаемый, обычно бывшие сидельцы, потому что в тех местах так принято.
Не знал, извините. А по существу ? Ну не примут претензию по этому случаю, понимаете ?
Именно питч, ролл и яв - квадрокоптерный сленг.
А тангаж, крен и рыскание - самолетная тема.
Соглашусь. На пультах же идет обозначение на английском языке. Буду себя переучивать )))
