Махолет-планер с плоско-параллельным движением крыла

Не надо забывать про сложную структуру “обшивки” птичьего крыла. Гибкость задней кромки, которая способствует изменениям углов атаки и перебалансировке, обеспечивается сложной структурой и особым роасположением перьев. Перья, в свою очередь, сами имеют сложную структуру, дифференцированную жесткость, разную при маховых движениях в разные стороны.
Не надо забывать про сложную структуру “обшивки” птичьего крыла.
Скорей всего махолёты ближе не к птице , а летающей мыши .
Скорей всего махолёты ближе не к птице , а летающей мыши .
Поэтому, кинематика не требует усложнений. Крутильная гибкость крыла при радиальных взмахах обеспечивает ТЯГУ. Управление направлением у “летучих мышей” и “летающих рептилий” усложняет кинематику, поэтому все реальные махолеты снабжены управляемыми хвостами с 2 или 3 плоскостями.
Да если установить изначально угол для хода крыла вверх, а угол для рабочего хода будет получаться за счет упругости. Только тогда махолет будет однорежимный и будут потери “на люфты”.
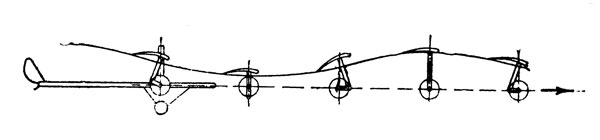
Основная задумка- не молотить крылом по воздуху, а плавно подтягивать крыло к фюзеляжу (или фюзеляж к крылу?), с частотой порядка 1 Гц.
Полетит вот доказательство: 😃
" Многое по созданию аппаратов такого типа сделал Г.С.Васильев. В своей книге “Основы полета моделей с машущими крыльями” (Москва, 1953 г.) он описал одну из них, построенную еще в 1923 году немецким инженером Рейфенштейном (сам принцип махолета с параллельным взмахом крыла был разработан в России в 1911 году). Чертежи ее приведены на нашем рисунке 4. Крыло имеет жесткую переднюю кромку и гибкие бамбуковые хвостовые части нервюр. Оно жестко связано с двумя шатунами, приводимыми в движение кривошипами. Последние имеют общий вал, на который намотана нить мотора, приводимого в движение шестью резиновыми нитями сечением 2 мм2 каждая и длиною 140 мм (в растянутом состоянии 840 мм). Модель весила 120 г и совершала 10,7 взмаха в минуту. Дальность полета составляла 20 м при длительности 5 секунд. Резиномотор весил 1,5 грамма и мог развивать мощность в 1,3 ватта. Иными словами, мощность всего 10,8 ватта приходилась на один килограмм веса модели. Скорость полета, конечно, была маленькая, но огромные энергетические преимущества машущего полета здесь налицо."
Вопрос в том КАКИЕ именно должны быть движения и какова будет ЭФФЕКТИВНОСТЬ всего этого.
Если при испытаниях модели подтвердится допустимость аналогии с колебаниями качелей (скейтбордиста в рампе), то насчет “правильных” движений можно так рассуждать.
Поставим на качели вместо человека- моторредуктор такой же массы, который через кривошипный механизм может сам себя поднимать-опускать (на ту же высоту, что и ЦТ человека). Что произойдет, если включить мотор? Понятное дело, что смотря из каких начальных условий. Если из неподвижного положения в нижней точке, то мотор так и будет ходить вверх-вниз без раскачивания качелей.
Если мотор включить из отклоненного положения дощечки, то тут вариантов куча- начнет ли он с подъема из нижнего положения или с опускания из верхнего, с какой “быстротой” (частотой колебаний).
Если человек будет стоять рядом и управлять по радиоканалу подъемами-опусканиями мотора, то он вполне сможет раскачать качели, как если бы стоял на них сам. Даже “солнышко” сможет крутануть. Если же мотор будет предоставлен сам себе с фиксированной частотой подъемов-опусканий, то такая ситуация рассматривается в учебниках по ТЕОРИИ КОЛЕБАНИЙ (сделаю подборки). В результате колебания могут получиться как устойчивыми, так и неустойчивыми (в зависимости от соотношения параметров-масса, зависимость сопротивления от скорости, частота перемещений мотора).
Махолеты (любой схемы-классической птичьей, с плоскопараллельным движением крыла) без обратной связи могут оказаться как в области устойчивых, так и неустойчивых колебаний. Причем даже у хорошо летающих махолетов колебания могут быть устойчивыми, но не самыми эффективными с энергетической точки зрения. Человек на качелях-хороший пример малозатратных колебаний. С точки зрения минимизации затрат энергии на полет мускульный вариант махолета может выигрывать у моторного без обратной связи.
В предложенном проекте модели интересно попробовать управлять моментами взмахов и опусканий крыла в ручном режиме- попытаться раскачать “воздушные качели”.
Качели и скейтбордист - более простые системы,( голономные связи и все такое…))) - я бы например взялся сделать механического раскачивателя качелей, и уверен что получилось бы. С крыльями и воздухом у меня такой уверености совсем нет… Но ваша идея мне определенно нравится!
Если я правильно понимаю (судя по картинкам), вы все-таки настаиваете на ПЛОСКОПАРАЛЛЕЛЬНОМ движении. Думаю надо все же менять угол установки крыла (примерно как на картинке DrRinke).
А замахнуться на обратную задачку флаттера не хотите? Придавая крыльям или оперению знакопеременные колебания определенной амплитуды и частоты можно получить тягу достаточную для горизонтального полета, при этом энергоемкость механизма “флаттера” ниже потребной для махолета.
Придавая крыльям или оперению знакопеременные колебания определенной амплитуды и частоты можно получить тягу достаточную для горизонтального полета
Никогда про такое не слышал. Это “общеизвестные вещи” или чье-то оригинальное исследование/проект? Можно ссылку?
Если при испытаниях модели подтвердится допустимость аналогии с колебаниями качелей (скейтбордиста в рампе), то насчет “правильных” движений можно так рассуждать.
Не подтвердится ! У вас скорей . если приводить аналогию , больше похоже на атлета подтягивающегося на турнике . То есть фюзеляж-это атлет , а турник крыло .
Всё дело в том , что у вас одно крыло на рисунке , а у махолета -два !
У каждого крыла есть ЦТ вокруг которого вращается крыло . При махах у махалёта около 1/3 крыла работает на подьёмную силу , а остальное как движитель .
У такой модели как у вас даже если зафлюгеровать крыло ( изменять угол атаки при поднятие и опускания фюзеляжа ) , подъёмной силы почти вообще не будет , в основном как движитель .

Флюгерное крыло всегда старается встать на такой угол атаки ( нейтральный угол) -когда подъёмная сила только из-за кривизны профиля ( обтекание потоков ) .
Ваш вариант , без флюгера вообще не будет работать !
Советую вам сделать Биплан . Жесткое крыло на фюзеляже будет отвечать за подъёмную силу и не даст колебаться фюзеляжу сильно . Я подвижное , верхнее крыло , флюгер будет работать как движитель .
Если при испытаниях модели подтвердится допустимость аналогии с колебаниями качелей (скейтбордиста в рампе), то насчет “правильных” движений можно так рассуждать.
Не подтвердится. Вы прежде чем изобретать, матчасть изучите. Хотите узнать где у воздуха опора? Формулу подъемной силы разберите на составные части. Вам уже подсказали про флаттер, так это и есть отталкивание от воздуха и раскачивание качелей, но вам нужно толкать их в другую сторону.
Вот еще вопрос “кстати о птичках”: как работает хвост дельфина, и что такое “фан эффект” и насколько существенный этот эффект в воздухе? Это к вопросу гибкой задней кромки крыла, а то некоторые считают, что так создается полностью вся движущая сила крыла птиц.
А замахнуться на обратную задачку флаттера не хотите? Придавая крыльям или оперению знакопеременные колебания определенной амплитуды и частоты можно получить тягу достаточную для горизонтального полета, при этом энергоемкость механизма “флаттера” ниже потребной для махолета.
Никогда про такое не слышал. Это “общеизвестные вещи” или чье-то оригинальное исследование/проект? Можно ссылку?
Как раз на этом принципе и летал мой махалёт (видео в сообщении №6). Только у него был довольно большой пикирующий момент. Точную причину я тогда не выявил, возможно была слишком передняя центровка, а может просто подъёмная сила крыла была мала, чтобы набирать высоту, но я решил эту проблему путём установки стабилизатора на угол порядка минус 30 градусов. Но при движении крыла за моделью был хороший поток. За счёт подобных движений плавают рыбы, только у них среда плотная и имеется плавучесть, поэтому и частота колебаний хвоста нужна небольшая для достижения малой скорости. Ну, а когда хищная рыба делает бросок, она очень резко и с большой частотой делает движение хвостом.
Может понравиться такая схема .

Модель весила 120 г и совершала 10,7 взмаха в минуту. Дальность полета составляла 20 м при длительности 5 секунд. Резиномотор весил 1,5 грамма и мог развивать мощность в 1,3 ватта. Иными словами, мощность всего 10,8 ватта приходилась на один килограмм веса модели. Скорость полета, конечно, была маленькая, но огромные энергетические преимущества машущего полета здесь налицо."
Получается один взмах за 5,6 секунды , а 20м он не успел даже сделать полный цикл одного взмаха .
Шайтан-самолёт , только не понятно с какой высоты запускали , что столько пролетел 😃
Как понял тут вся фишка в отрицательном угле атаки крыла относительно стабилизатора и потом в возращение крыла на положительный угол атаки .
По сути получается двух-режимный полёт , сначала пикирование с ускорением , потом кабрирование с замедлением , полёт как по стиральной доске 😃
Только мне кажется так может лететь модель с очень маленькой нагрузкой на крыло ( и то не далеко , до второго взмаха ) . На кабрирование больше энергии затрачивается и сопротивление сильно растёт .
один взмах за 5,6 секунды
Думаю в секунду. У птиц, взмахов в секунду:
Воробей 13
Домашний голубь 5
Обыкновенная кряква 5-9
Серый журавль 2,5
Аист 2
Шайтан-самолёт , только не понятно с какой высоты запускали , что столько пролетел Как понял тут вся фишка
Самолет точно соответствует пожеланию автора этой темы “махолет-планер с плоско-параллельным движением крыла”. Не нужно ничего анализировать, крыло шайтан-самолета работает по принципу крыла птицы. Векторы скорости воздуха и крыла складываются и относительно этого относительного вектора крыло устанавливается на угол близкий к оптимальному ~5градусов.
крыло шайтан-самолета работает по принципу крыла птицы
У птицы два крыла ! Не полетит она с одним крылом , даже песня есть про это:)
Думаю в секунду.
Тогда не соответствует мощности резиномотора , двигать крыло больше 40 грамм , редуктор намного больше Ватт нужно .
Скорей всего все цифры от “фонаря” , да и сама модель выдумка . Если-бы такая модель летала -то уже давно повторили .
Это очень похоже на байку с самолётом Болдырева , провели в наше время испытание в трубе -получили "пшик " .
Самолет Болдырева здесь конечно оффтопик. Лучше летающую газонокосилку перевернуть вверх ногами, эффект будет намного существенней:).
Центробежный насос вместо простых лопаток, получится тяга за счет подсоса на носке профиля.
Шутка, но летать будет.
Полетит вот доказательство: " Многое по созданию аппаратов такого типа сделал Г.С.Васильев. В своей книге “Основы полета моделей с машущими крыльями” (Москва, 1953 г.) он описал одну из них, построенную еще в 1923 году немецким инженером Рейфенштейном
Вот тут подробное описание модели и принципов в нее заложенных. fly-history.ru/books/item/f00/s00/…/st006.shtml
Васильев Г.С. ‘Модели с машущими крыльями’ - Москва: Издательство ДОСААФ, 1960 - с.87
Есть еще на эту тему книга Тихонравова и др.
Вот тут подробное описание модели…
Значит всё-же 10,6 взмаха в секунду , но всё равно будет дрыгаться фюзеляж , у него нет площадей чтобы опираться , а сила притяжения земли будет преобладать .
Вы лично верите , что так происходит в полёте ?
Такое может быть в двух случаях когда вес фюзеляжа больше подъёмной силы крыла , то есть модель не способна набрать высоту , только дрыгаясь планировать со снижением .
Или она катится по земле , крыло работает как движитель , потом она по инерции начинает влетать , но потом всё равно она не может лететь нормальный махолёт .
Да и честно говоря не показатель для модели в 120 грамм и площади крыла 10 дм2 пролететь 20 метров . Пульнуть планерок и дальше можно .
Такое может быть в двух случаях когда вес фюзеляжа больше подъёмной силы крыла , то есть модель не способна набрать высоту , только дрыгаясь планировать со снижением .
Ход крыла небольшой. Крыло не успевает разогнаться, кроме разворота крыла еще нужна вертикальная скорость, для получения тяги.
Но там в книге есть еще более странный вариант. Привод с колебанием грузика при неподвижном крыле. На самом деле принцип практически такой же, но изменение угла крыла за счет его упругой обтяжки. Если груз достаточно большой и отклонение ЦТ существенное, что то может и получиться 😃.