Марсоход для Марс500

Уважаемые моделисты! Сегодня мне довелось потрогать модель марсохода разработанную для проекта Марс500. На данный момент аппарат находится в институте МИРЭА, где простаивает уже долгое время. Просьба всех, кто знаком с этой темой, откликнуться! Спасибо за внимание)
Очень правильно, что тема в курилке.
😃
Очень правильно, что тема в курилке.
😃
А куда еще закинуть, я не придумал. Поступило предложения от владельца аппарата(института) восстановить марсоход, так как он уже четыре года стоит без дела. Думаю мне будет несколько проще реализовать задумку, если найдутся знающие люди
Это модель или реальный аппарат? Какова цель восстановления?
Если ему на Марс лететь, даже гипотетически - советую туда руками не лазить, пусть этим опытные профессионалы занимаются.
И тут недостаточно “знакомства с тематикой” - тут всё от конкретных задач и технических ограничений “пляшет”.
Это модель или реальный аппарат?
По сути модель.

В общем то годится любая “FPV-телега” с манипулятором.
И тут недостаточно “знакомства с тематикой” - тут всё от конкретных задач и технических ограничений “пляшет”.
Судя по картинкам - какая- то прачечная вырисовывается - какой нахрен марс на колесах от лего…
Так он и называется моделью. Никто его никуда не собирался отправлять.
Моделировался процесс управления неким объектом с большими задержками в каналах управления и обратной связи.
Для этого не требуются мегакомпутеры и нанотехнологии.
Там вообще весь эксперимент был не техническим, а медико-биологическим.
Все верно, робот никуда не полетит, только симуляция на земле
Так а в чем проблема?
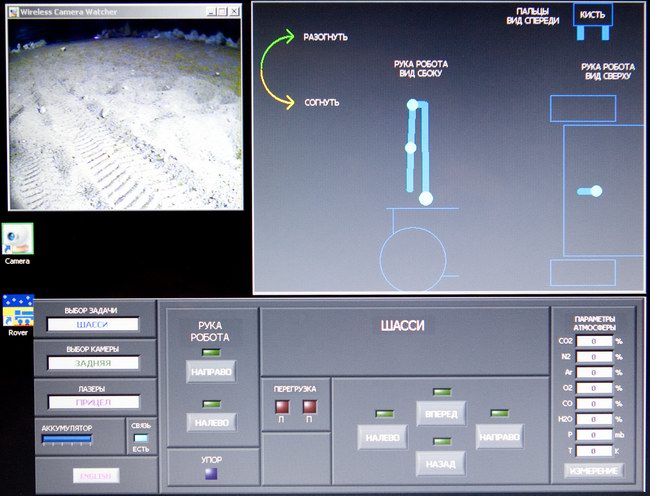
Там же все нарисовано:
Достаточно типовая “телега”.
Думаю мне будет несколько проще
если найдутся знающие люди
А в каком смысле “проще” и в каком- “знающие”?
Тут нужен автомоделист, знакомый с р/у моделями, и не только с гонками на них, но и с изготовлением оных?
И попутно- с FPV.
Учитывая, что всю электронику там придется сделать с нуля, поскольку за давностью лет все советские детали пришли в негодность, работа предстоит нехилая и по деньгам и по трудодням…
Какой бюджет МИРЭА рассчитывает на это потратить? (можно- в личку, я как раз М/С по р/у авто и много лет- занимался FPV)
Или вам пообещали зачет/автомат?😃
И леденец…
Тогда это- в дворец пионЭров.
объектом с большими задержками в каналах управления и обратной связи.
Насколько помнится, задержка сигнала до Марса- была от:" Соответствующее время движения электромагнитного сигнала - от 3 минут 6 секунд до 22 минут 17 секунд. " минут" ? www.astronomy.ru/forum/…/topic,132814.0.html
То есть, дернул ручку- и можно чай пить? Причем, эту задержку- надо на 2 умножить, чтобы реакции дождаться? По-моему, на таких тормозах- им просто невозможно управлять напрямую?
Какие советские детали?
Какой чай?
Эксперимент проводился уже в этом веке. На фото хорошо видно, что широко использовались готовые комплектующие от РУ моделей.
По условию эксперимента телегой управляли из “посадочного модуля” и, при отказе ПУ на нем, из “орбитального модуля”.
Т.е. речь идет о задержке до нескольких секунд. Это как раз вариант, когда управление объектом быстро приводит оператора к раздражению.
Никаких советский деталей там нет, в 2012 году был собран этот робот. Серая цифра футаба, камеры сони еффио. Управляющая техника на ардуино, я так полагаю. “Знающие” я имею в виду, что кто-то может в свое время читал или слышал про это, и знает какие-то статьи или подробности того, что там и как. Ибо разбираться с нуля будет не просто и долго.
на ардуино
Так в чем тогда проблема?
Ардуино тут обсосан до косточек, даже ветка огромная есть в "
Полеты по камере, телеметрия
Правда, мне непонятно, зачем оно там вообще? По точкам ползать?
Так на Марсе GPS нету, как ориентироваться?
Судя по грусти- Т.Д. нету вообще никакой?
Зная уровень работы СтудКБ при ВУЗах- представляю, какие там змеи из проводов…
из “орбитального модуля”. Т.е. речь идет о задержке до нескольких секунд
При управлении с орбиты- о каких задержках “в несколько секунд” может идти речь : на расстоянии 300 км-1 мСек? Помнится, при управлении луноходом с Земли- и то задержка была всего несколько секунд, что вполне приемлемо?
Другое дело, что для достоверности модели- потребуются два комплекта антенн: одна для работы с “зенитом”, другая- “по горизонту”?
Что касательного общего решения задачи- я бы сделал так, как делал на мультикоптерах и вертолетах : две раздельные аппаратуры- одна ходовая, для управления движением и вторая- управление манипулятором. Естественно, в разных диапазонах. Соответственно- два оператора, водитель и манипуляторщик.
Если там есть поворотник и трансфокатор на камере: он же- вертит камерой и фокусом. Иначе от оператора потребуется сверхкоординация…
Что касательно реверсного инжениринга- задача тоже нехилая.
Проще- все поотрывать и сделать снова, используя только железо?
Ардуино там для управления поворотными механизмами и руками захвата, на которой, к слову, 8 серв и все на обычном пвм, там кос и соплей как в новых немцах(авто). Ошибаетесь, при управлении с земли задержка более 100 сек, по этому просто задается программа, которую робот выполняет. Думаю в ближайшее время утресу организационные вопросы и наконец “вскрою” его, так что ждите фото, кому интересно
я бы сделал так
Делать надо, как требуется заказчику.
В данном эксперименте не ищутся решения технических проблем, там ставятся опыты над людьми, их поведением в определенных ситуациях. Используемая техника - только инструмент для проведения таких экспериментов, помогающая моделировать необходимые ситуации.
Поэтому логика управления объектом и интерфейс могут быть очень специфическими.
При управлении с орбиты- о каких задержках “в несколько секунд” может идти речь
Любой цифровой канал, в который запихнули еще и видео, в помеховой обстановке даст такие задержки, а экспериментаторам как раз интересны ситуации, близкие к экстремальным.
Ардуино там для управления поворотными механизмами и руками захвата
Ну, это детали: ничто не мешает применить аппаратуру на 14 каналов без ненужных осложнений в виде Арду?
А вот отсутствие курсовой и наводящей (для манипулятора) камеры- несколько озадачивает?
Как схватить то что нибудь, если ничего не видно?
Самый простенький робот минер- имеет как минимум две камеры?
defense-update.com/…/artist_experiment_151109.html
а экспериментаторам как раз интересны ситуации, близкие к экстремальным.
Ну, тогда можно предложить еще встроенный в стул шокер: очень будет их бодрить и экстремировать?
тогда можно предложить еще встроенный в стул шокер
Сначала проводят испытания устройств на их авторах.
Ну, это детали: ничто не мешает применить аппаратуру на 14 каналов без ненужных осложнений в виде Арду?
А вот отсутствие курсовой и наводящей (для манипулятора) камеры- несколько озадачивает?
Как схватить то что нибудь, если ничего не видно?
Самый простенький робот минер- имеет как минимум две камеры?
defense-update.com/…/artist_experiment_151109.htmlНу, тогда можно предложить еще встроенный в стул шокер: очень будет их бодрить и экстремировать?
Шесть камер в круг, с возможностью вывода видео сразу со всех камер, в том числе и на “руке”
Вот понять бы как на них показания осд накладывать, не пустили же через одну плату шесть камер
Мне кажется лучше всего было бы крышку скрутить и глазами все увидеть.
Дольше всего времени займёт вникание в софтверную часть.
В данном эксперименте не ищутся решения технических проблем, там ставятся опыты над людьми, их поведением в определенных ситуациях. Используемая техника - только инструмент для проведения таких экспериментов, помогающая моделировать необходимые ситуации.
как на них показания осд накладывать
Я бы пошел по другому пути: я бы не осд накладывал, а виртуальный марсоход наложил бы на реальную картинку с камеры, который управлялся бы стиками или джойстиком водителя, причем с динамикой соответствующей характеристикам этой модели вездехода.
Идея в том, что водитель управляет виртуальной моделью визуально в режиме реального времени (без нервотрепки), а все его управляющие воздействия транслируются в программу, которая управляет реальным марсоходом по мере её достижения марсохода.
Все искусство создания системы управления моделью будет состоять в адекватности характеристик модели. Понятно, что чем короче интервал управления, тем точнее модель управления будет отражать конечное положение реального марсохода.
Дарю. Если не кандидатская, то для дипломной работы подойдет. )
Дольше всего времени займёт вникание в софтверную часть.
Вот сдается мне, что заказчику нужно именно восстановление с минимальными затратами, без воплощения чьих либо гениальных идей.
В идеале (для него) обойтись только работой с ПО.
Наверняка имевшееся банально пролюбили, а контакты с его создателями либо потеряны, либо прерваны по инициативе этих создателей.