Activity
Известно ли какой именно ARM чип используется в кролике?
Еще думаю про получения с кролика данных от датчиков во время полета. Может через плату usb-host+микроконтроллер. Кто-нибудь пробовал?
Хочу посоветьваться насчет настроек Esc
Использую моторы 360kv (Rctimer 5010-14) с Hobbyking YEP 45A (это аналог YGE L-series), ничего проще для 5s не нашел
батарейка 5s, пропеллеры 14x4.7
На кролике частота Esc настроена 400Hz, если ставлю на кролике 2kHz, то моторы не крутяться. Это почему так?
Настройки Esc у меня такие:
Startup speed: Heli fast (Heli slow/Heli middle/Heli fast/Plane slow/Plane middle/Plane fast)
PWM frequency: 8kHz (9kHz/10kHz/12kHz/14kHz/16kHz)
Start-up power: Auto 1~32% (2%/4%/8%/16%/32%)
Motor timing: 18° (0°/6°/12°/18°/24°/30°)
Brake: off (Acro/Acro hard/smooth/middle/hard)
Cut-off type: off (slow down/cut-off/NiMh/LiFe/LiPo)
Тайминг такой стоял изначально, такой и оставить?
А калибровку горизонта делали?
да
Crabe, ufk, aavladimirov спасибо за помощь!
Всем привет!
Собираю первый коптер, есть 2 вопроса по кролику:
-
Заказал кролика на али-экспресс, с дополнительной платой с High-precision barometer
фото полученной платы: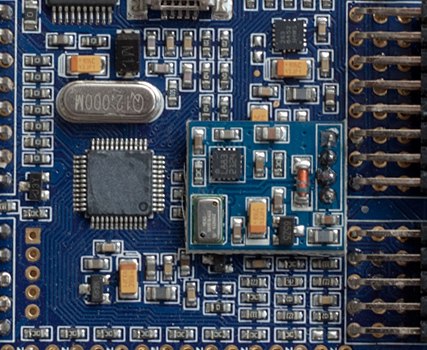
выглядит немного не так как новая плата на картинке, но вроде и не так как старая
стоит ли жаловаться на продавца или все ок? -
При попытке взлета двигаю только стик газа и коптер начинает лететь не вертикально вверх, а в какую-нибудь сторону. Компас пока не калибровал,
моторы-пропеллеры не балансировал.
Вот видео:
www.youtube.com/watch?v=sWHQ23rdwWE
Так и должно быть? Или что-то нужно настроить?
Может, Вы хотели спросить: "А есть ли в этой аппе тренерский разъём?
нет, я хотел узнать может ли принимать внешний ppm сигнал по кабелю
на дешевой аппе которой я пользуюсь есть разъем “trainer”, но он работает только как источник сигнала, для симулятора например
как входной порт он не работает
а может ли эта аппа принимать ppm-сигнал по кабелю, т.е. передавать данные не со своих стиков а со стиков другой аппы?
Собираю квадрик с полетным весом ~ 2 кг
главная задача – стабильность полета и время желательно ~ 10 минут
вот мой расчет в калькуляторе 
(ссылкой почему-то не вставляется)
сначала я хотел использовать вот эти моторы 4215(3507) 650KV Multicopter Brushless Motor www.rctimer.com/index.php?gOo=goods_details.dwt&go…
но с ними add. Payload получается слишком маленький, порядка 300 грамм, а мне нужно 600
пропеллеры думал использовать APC 12x3,8, но с ними получается слишком короткое время полета
так что в итоге:
LiPo 5000 mAh
Esc 20A
моторы MT-3506 650KV clubheli.com/Tiger-Motors-MT-3506-650KV_p_3583.htm…
пропеллеры APC 14x4.7
поелетит ли такой набор? что я делаю не так?
что-то моторы дороговаты, есть ли алтернатива?
Всем привет!
Спрашиваю у вас чтобы узнать возможно ли сделать то что я хочу и сколько это может стоить, а также какие компоненты лучше использовать.
Вот такая у меня задача:
Коптер должен иметь возможность поднимать груз порядка 600 грамм.
Хотелось бы коптер для управления которым не нужны специальные навыки. И еще для меня очень важна возможность точно спозиционировать коптер. Т.е. скорость и маневренность особого значения не имеют, важнее плавность и точность, типа как при видеосъемке. Длительность полета: не менее 10 минут.
Еще у меня есть несколько деталей, подойдут ли они для такой задачи: Arduino 2560, два аккумулятора по 1300mah, 4-х канальный передатчик.