Activity
Алексей, когда появится подержка can телеметрии от полетных контроллеров DJI ?
storm 32 давно уже реализовал поддержку их протокола, сразу решается проблема с коррекцией горизонта без внешних гпс и возможность управления подвесами с помощью лайбридж2
всем привет.
почему может возникать такая вибрация при хотьбе с электронным стедикамом ?
хват за две ручки (как у ронина) вес 3,5 кг.
ещё если дрожание на руках появляется, оно тоже добавляет свое.
вот сделал нарезку где есть хотьба со стедикамом:вот такая тряска появляется.
сижу на месте тестирую, нет тряски, только при хотьбе и когда руки дрожжат от усталости или неудобных поз. (с бегом там хуже всё)
ведь как то даже бегают со стедикамом, и нет тряски, а тут обычный медленный шаг, и трясется.
Как можно улучшить ситуацию ?
alexmos 32 bit установлен, резонансов нет. в чём дело, какие параметры контроллера могут такую вибрацию убрать ? или на это может влиять виброразвязка ? (демферы резиновые есть после ручек)
Значение пидов в студию!
подозреваю что P в районе 10, D около 4-5
по одному имел ввиду, если по два на ось, то 4S.
приветствую, коллеги! собираюсь делать стабилизатор под камеры типа Black Magic URSA, Red Epic и Arri Alexa Mini с порядком моторов Cam-Roll-Pitch-Yaw для работы с шестом. хочется на каждой оси использовать по два мотора, установив их разнесённо, чтобы обойтись и вовсе без дополнительных внешних подшипников. вопрос в выборе моторов, их подключении и платы управления. вот такие моторы надыбал ru.aliexpress.com/item/…/32845971509.html?algo_exp… но пока неясно, потянут ли пара таких моторов на каждой оси камеру в 7-8кг (стабилизатор будет с энкодерами, само собой), можно ли просто объединить провода моторов попарно (с соблюдением направления вращения), или там всё сложнее? так же неясно, хватит ли мощности классических плат, или нужны будут дополнительные драйвера. если да, то какие? заранее спасибо за советы!
использую такие моторы в своих проектах, ничего фантастического, обычные китайские слабо намотанные моторы(дуалскаи в мотают лучше и плотнее) с сопротивлением в 10 ом их можно спокойно питать от 6S. Кстати собраны они на клей, в домашних услвиях разбирать будет крайне проблематично.
Раньше я использовал дуалскаи 7015, некоторые перематывал сам на сопротивление 6,5 ом под питание 4S, кстати тюни про отлично справляется с такой нагрузкой, тепло рассеивается на алюминиевый корпус, он же силовой элемент подвеса.
Комплект MiniRX, которых вышло ажно 200 (!!) штук,
Евгений, можете поделиться парочкой плат?
Кстати китайцы сделали композитку и назвали её Skywalker X8
Там и парашютный отсек и винглетты вниз. В общем мечта FPVшника.
Есть подозрение, что этот “композит” изготовлен по классической китайской технологии из белой тряпки вымазанной полиэфиркой, со всеми вытекающими летными и эксплуатационными характеристиками.
похоже направление осей неверно выставлено или реверса на моторах
спасибо, прочел инструкцию и понял, что у меня тх модуль не видит ппм
да, как через него биндить?
и замыкаете 1 и 2 порты? при бинде
да, разумеется
да по обычной 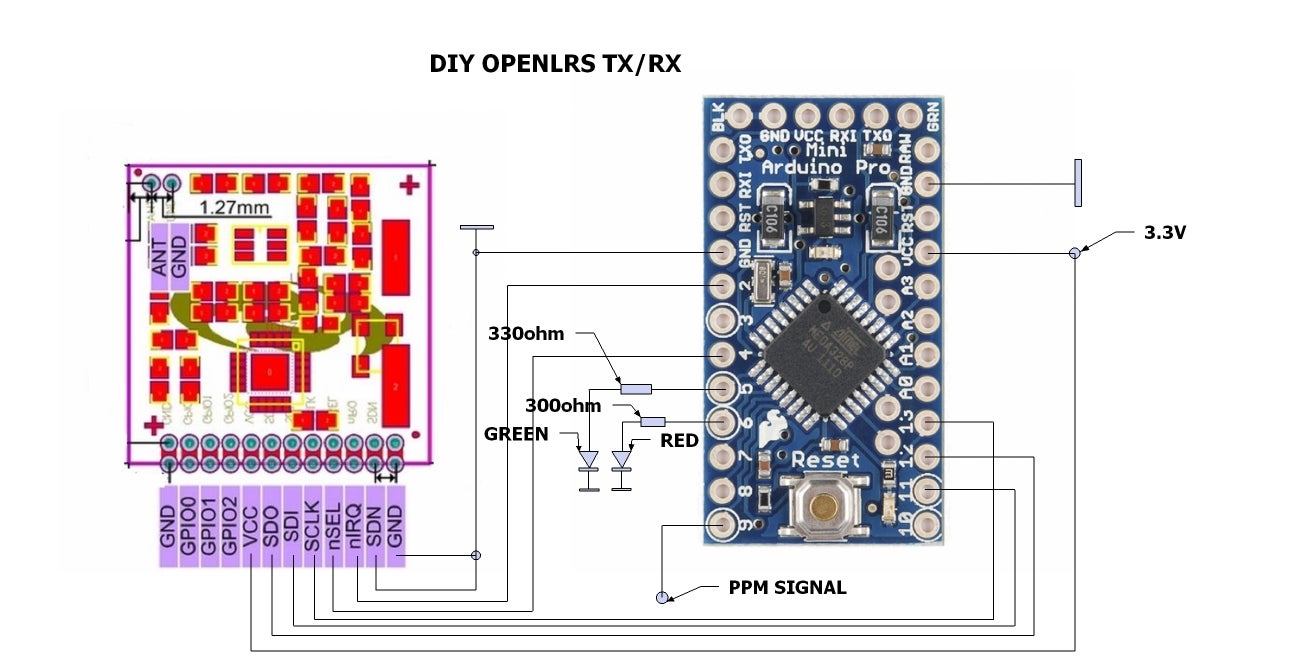
правда не могу найти распиновку выходных портов
Коллеги, подскажите, куда копать!
купил модуль оранж 1вт, залил прошивку, вч часть работает, в анализаторе спектра бегут значения
приемник собрал из ардуинки и модуля si4432, заливал тестовую прошивку для тх модуля, в анализаторе спектра тоже есть показания, вч часть работает. Потом перепрошил нормальной прошивкой для тх 5 конфигурации железа и никак не могу прибиндить приемник, передатчик переходит в режим бинда, моргает синий светодиод и пикает, а примник не видит…
что я делаю не так? может джампер наприемнике нужно поставить?
последнее время использую PWM серво выходы 1-4 для управления настройками камеры и постоянно появляются скачки значения шим в крайнее положение с периодом в 3-5 секунд
если подключить сервомашинку, она не отрабатывает эти скачки, только на доли секунды начинает гудеть. и это проявляется даже если входящие сигналы управления сервоканалами, в моем случае это подключенный модем по уарту.
В каком направлении копать?
И еще последнее время при включении подвеса он плавно начинает поворачивать по крену градусов на 15-20 в течении минуты а потом снова возвращается в нейтральное положение, при этом в гуи горизонт отображается ровно. Я пробовал калибровать гироскоп, акселерометр, не помогает…
я поначалу подумал, что это у меня косяк с иму или контроллером, но точно такая же картина наблюдается у коллег из казани на их оборудовании.
Алексей, что делать с этим?
Алексей, пытаюсь разобраться с библиотеками в примерах для управления через UART. В пример mimic control добавил управления 4 сервоканалами, работает
cmd_servo_out.servo[1] = analogRead(3);
SBGC_cmd_servo_out_send(cmd_servo_out, sbgc_parser);
не могу найти команды для управления API_virt_ch и RC_speed_pich
спасибо!
подключил dbus шину к алексмосу, к камере и к А2, все работает, правда заработало только с помощью сигнал бустера. Все устройства видят 18 каналов, из которых активны только первые 14. теперь думаю о покупке экстенсион кит для пульта, либо второго пульта.
А может кто пробовал от первого инспаера пульт конектить слейвом?
такой получился протокол
cloud.mail.ru/public/G4zt/X841SvAA3
вроде пропущенного нет - равно разбивается
начало - 0х55 (85)
второй байт - длина фрейма в байтах 43, 21 или 18
Олег, а протокол dbus по которому общается LB2 с A2 не анализировали?
сбросил епром и перепрошил, заработало. удивило, то что в режиме и2с энкодер работает с гораздо большим зазором между магнитом и микросхемой, до 2х см опереелялось положение магнита
Hight speed off, на этот пункт я обратил внимание в мануале. Может не хватает подтяжек?
да, все именно так, лицензия и все подключено в шину иму сенсора
Коллеги, подскажите!
не могу заставить энкодеры as5048B работать по шине i2с.
pwm выход работает исправно.
микросхемы заказывал со штатов, платки травил сам. питание идет 5в, обвязка из конденсаторов распаяна, выходы A1 A0 подключаю на землю, в гуи задаю адрес i2c enc roll 0х40 и в мониторинге нет движений.
что я делаю не так?
Если данные уже после фильтрации сенсоров, то можно попробовать
www.rcgroups.com/forums/showpost.php?p=27129264 вроде как есть, готов стать бетатестером
Алексей! а gremsy используют ваш контроллер?
нашел у них в продуктах любопытный девайс, называется CanLink , как я понял выпоняет функцию мавлинка при связке sbgc23 с APM
“features a can bus adapter coupled with a slip ring and in combination with the
gMotion controller offerring the ability to communicate with a DJI flight
controller via CANBUS to correct horizon drift.”
Вы планируете в дальнейшем сделать поддержку полетных контроллеров от DJI для компенсации горизонта?
Кстати, профиль у них только на столах, все остальное фрезерованное из плит.
профиль тут один! и он везде, на столе, на портале, на оси зет и лишь некоторые элементы изготовлены из плит.
Лично я усомнился бы в качестве направляющих(неизвестного мне производителя)
пишут что хивин, но я в любом случае собираюсь купить только набор алюминиевых элементов, все остальное комплектовать и собирать самостоятельно
Наткнулся тут не давно на любопытные станочки из алюминиевого профиля, информация по ним есть только на оф сайте производителя. Хотел узнать может есть у кого опыт эксплуатации станков этой серии? или просто послушать ваши мысли по повод конструктива.
У самого есть старенький станок 4030 от этих товарищей, впечатление от него весьма неоднозначное, но точно могу сказать, что по качеству это лучшее в данной ценовой категории.
Ссылок и названий публиковать не буду, дабы не сочли за рекламу, только картинки
станок 900х600х150:


420х350х120


присматриваюсь к размеру 600х420, неспешно пилить алюминий.
Иначе придется после каждого монтажа заново обучать его. Длина может быть разная.
разве сложно разок прокатить да щелкнуть тумблером в концах? хорошо, а как по вашему реализовать метки?
Алексей, а можно добавить в прошивку контроллер для тросовой камеры? Необходимо задействовать один пвм вход с энкодера, который будет считать обороты и один пвм выход, который будет управлять регулятором оборотов и останавливать каретку в крайних положениях, ну и задействовать тумблер канала управления для установки крайних точек троса.
Я почти созрел заказывать батарейки в хк европе, кто еще надумал?
и показали лучшее время за круг
оринтировочно после праздников
собираюсь заказать пару кирпичей с европейского склада хк, кто со мной?
Мобильные пункты развернут по отбору граждан… Эх черт, а меня не возьмут уже…
Сегодня приехала бочка эталовской эпоксидки, смола очень жидкая, кому нужно обращайтесь.
Друзья!
есть у кого ЕС5 разъемы? нужны 4 пары, можно без корпусов.
большой… не смогу помочь Вам. у меня 420х300х100 рабочая зона
искусственный камень уже купили?
покажите проект, какие габариты и материал?
агась, прошлый раз за пару акумов отдал 15, сейчас 8, заманчиво однако!
отлично! спасибо!
а что с лицензией? 110 долларов это нормальная цена для 32 бит контроллера?