Activity
Всем привет!
Недавно, раздобыв на местной барахолке аппаратуру Graupner MX-16, я был поражен всеми возможностями встроенной телеметрии и аппаратуры в целом.
В комплекте с аппаратурой, продавец еще дал GPS-модуль, который подключается к приемнику и отправляет на пульт свои координаты, скорость, высоту и еще кучу других параметров.
Данный комплект предполагалось поставить на тренировочный коптер 450 размера.
За время, пока аппаратура ехала ко мне, я успел изучить всю линейку модулей телеметрии для данной аппаратуры и наткнулся на два интересных модуля:

HoTT BLUETOOTH® v2.1+EDR module for modular transmitter

HoTT BLUETOOTH® v2.1+EDR module for mx-12/16/20 #331xx
Оба они (через разные интерфейсы аппаратуры) могут быть использованы для подключения внешних устройств к аппаратуре(только к пульту).
К этим Bluetooth модулям можно подключиться с компьютера или Android-устройства и получать данные телеметрии с борта в реальном времени.
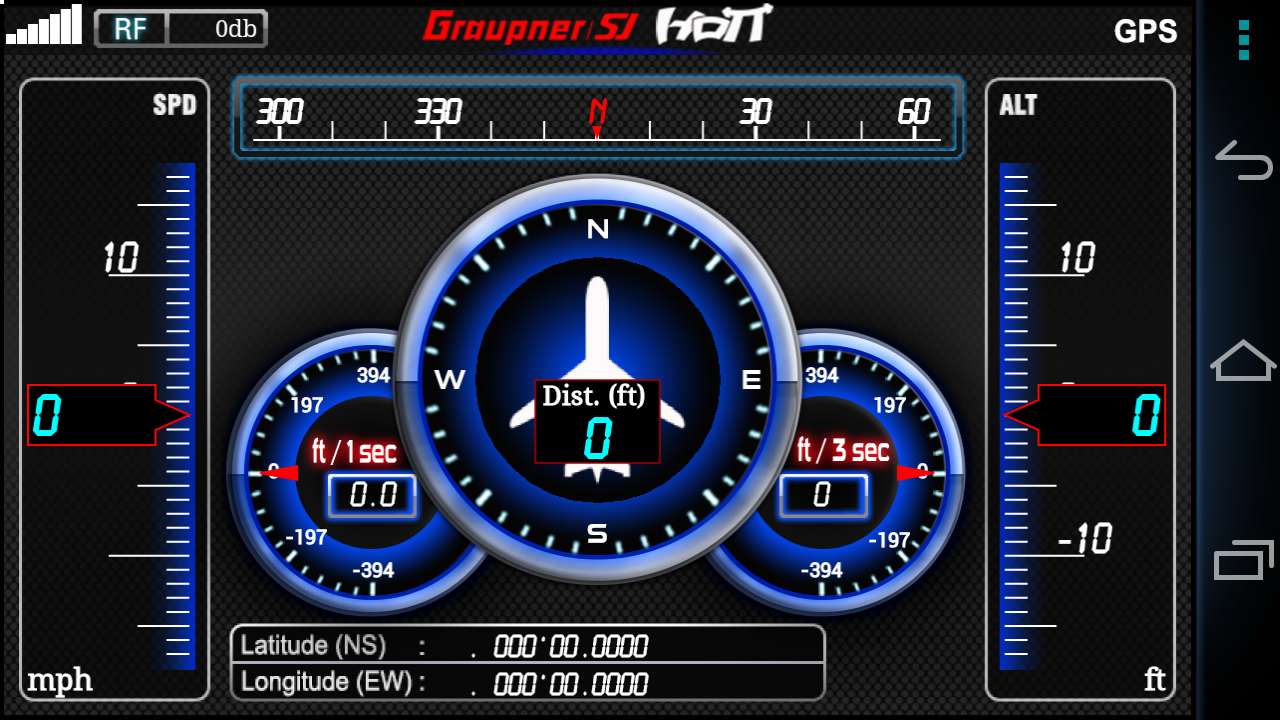
В Google Play бесплатно можно скачать приложения, поставляемые самим производителем, которые могут отобразить практически все параметры телеметрии в довольно удобной форме, вести логирование, а так же имеют встроенную функцию поиска модели и отображение модели на картах Google Maps.
По неизвестной для меня причине, graupner выпустил два приложения с практически одинаковым функционалом.


Graupner HoTT Viewer
Graupner HoTT Meter Viewer
Внимательный читатель спросит, а где же модуль за 10 вечно зеленых, ведь модули, указанные выше, стоят по 109 евро?
В процессе поиска этих модулей по российским магазинам, стала накатывать мысль, что платить больше ста евро, да еще и с учетом российских наценок, за простейший bluetooth модуль не разумно, учитывая что в ящиках стола лежала пара китайских HC-06(10$).
Подойдя к вопросу методом научного тыка, стало ясно что скорость обмена данными между аппаратурой и bluetooth модулем на стороне модуля нужно установить на значение 115,2k (но возможно у кого-то будет 19,2k).
Для этого в модуль через uart нужно отправить команду AT+BAUD8
В аппаратуре имеются пины tx/rx, к которым я и подключил модуль.


Питание взял с разъема, находящегося на задней части аппаратуры.
В итоге получилась довольно удобная связка, которая позволяет в случае “потери модели”, увидеть ее крайние координаты прямо на карте без особых затрат и в приятной форме.
В качестве бонуса эти приложения умеют, так же как и аппаратура, оповещать голосом пилота о показателях телеметрии.
Сейчас я занимаюсь разбором протокола телеметрии Graupner и возможно в скором времени я расскажу как выводить телеметрию с DJI Naza на аппаратуру Graupner.