Квадролет. Продолжение
Уже больше полугода назад опубликовал рассказ про постройку квадролета. С тех пор он достроен и немного перестроен. С самого начала цель была собрать аппарат, способный поднять в воздух хорошую камеру с большой матрицей. Но на зеркалки не ориентировался, потому что и для обычных фотографических занятий зеркалку Canon 60D поменял на Sony NEX-6. Поэтому и для съемок используется NEX. Специально для этого купил б/у NEX-5 с фиксированным объективом 16/2.8. Соображения по поводу покупки второй камеры изложены в статье О выборе камеры для аэросъемки с учетом риска
Перекомпоновка
Вначале площадки нижней пластины рамы F450 располагались спереди и сзади. На задней площадке был установлен приемник. Под передней планировалось расположить подвес с камерой. А сзади на рельсах шасси - аккумулятор. Но после предварительных прикидок пришел к выводу, что удобней площадки ориентировать поперек, а подвес расположить снизу рамы по центру. Угол обзора NEX с объективом 16 мм при таком расположении таков, что лучи и пропеллеры в поле зрения не попадают. Тем более, видеосъемку не практикую, а при фотосъемке камера чаще направлена вниз. Да и аппарат во время фотографирования обычно висит в одной точке, и рама может наклоняться вперед только для сопротивления ветру.
При расположении компонентов на раме соблюдались такие принципы:
- Приемники и передатчики должны располагаться дальше друг от друга, то есть на противоположных сторонах рамы.
- Усы приемной антенны подальше от силовых проводов.
- Силовые провода от аккумулятора подальше от компаса.
- Ни один элемент не должен попадать под воздушный поток под препеллерами.

Аппарат готов к полету
Картинки (эта и остальные) кликабельны
В результате размещение элементов получилось таким:
- Аккумулятор сверху вдоль, разъемами назад.
- GPS и компас - справа спереди у основания луча на складывающейся ноге.
- Приемник радиоуправления справа на площадке нижней пластины.
- Усы приемной антенны под прямым углом друг к другу в горизонтальной плоскости параллельно правым лучам на достаточном удалении от них.
- Видеопередатчик на левой площадке нижней пластины рамы с антенной (клевер), направленной вниз.
Сейчас видеопередатчик закреплен на алюминиевом уголке, приклепанном к левой площадке рамы. Это позволило опустить клевер существенно ниже (5см от земли), что заметно улучшило качество приема видеосигнала. В прежнем положении при повороте по курсу антенна затенялась корпусом аппарата (подвесом и камерой), что вызывало сильнейшие помехи. Теперь помехи тоже случаются, но гораздо меньше.
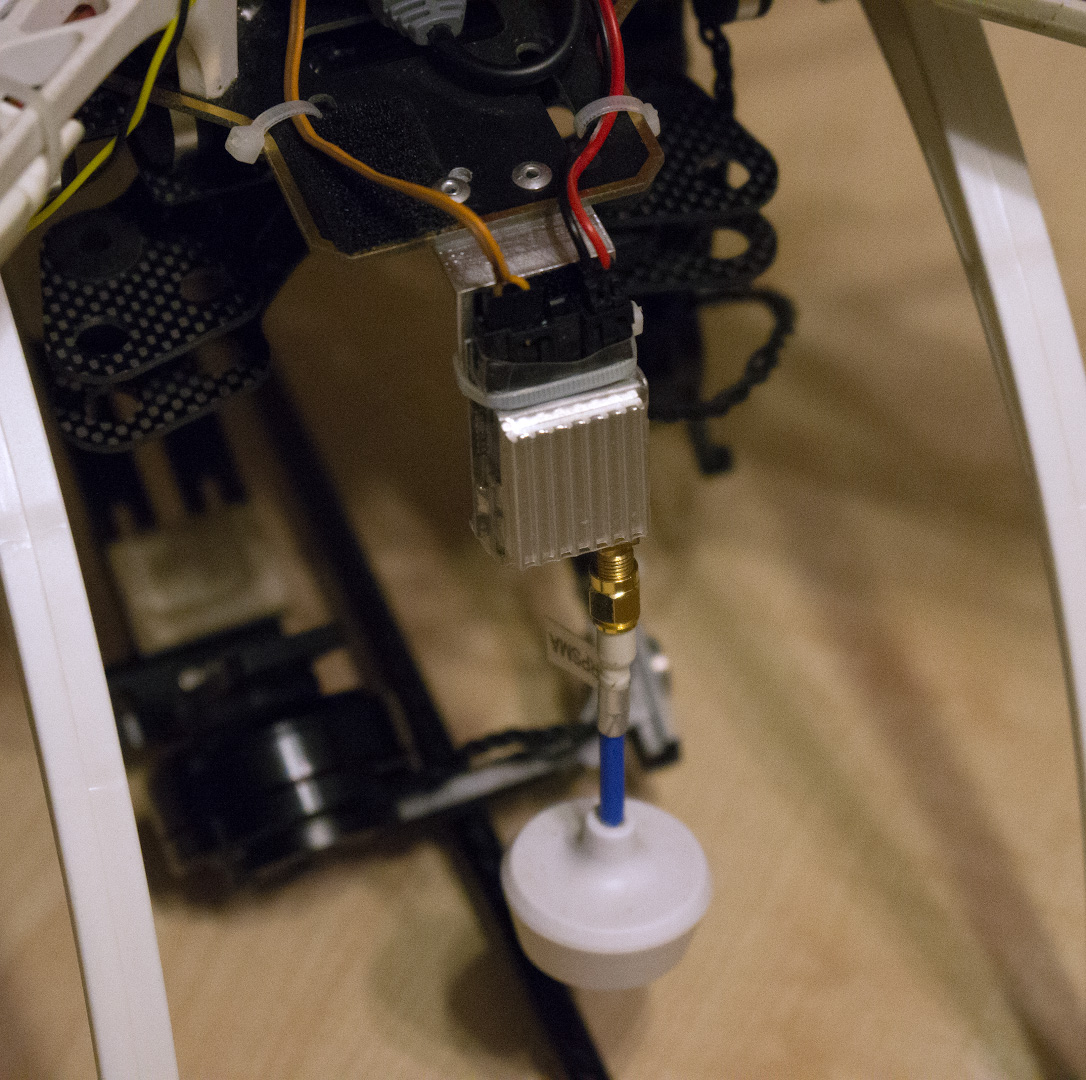
Измененное крепление видеопередатчика с антенной
Между пластинами рамы расположены (все закреплено на нижней пластине):
- Полетный контроллер Naza V2 на двухстороннем родном скотче. Немного правее центра, чтобы рядом поместился блок PMU
- Блок PMU на двустороннем скотче 3M (для наружного применения).
- iOSD mini на двухстороннем скотче 3M поверх PMU через проставку из бальсы.
- Преобразователь (BEC) 4S-6S -> 12В 3A для питания видеопередатчика и подвеса.
При такой компоновке все разъемы всех блоков доступны без разборки рамы.
На верхней пластине рамы также расположены:
- На липучке с фиксацией стяжкой закреплена “пищалка” - индикатор напряжения аккумулятора. Скоро переедет в другое место, откуда его показания можно будет читать с земли. Для подключения будет использован удлинитель балансирного провода. Пришлось его заказать, потому что на аккумуляторе Revolectrix балансирный провод всего 4см - никуда не достает.
- Там же на липучке с фиксацией липучим ремешком ставится GPS-трекер.

Вид с правого борта
Подвес
Подвес на БК-моторах собран на основе двухосевого DYS с заменой моторов, контроллера и модернизацией способа его крепления к раме.
Сборка и настройка подвеса заняла несколько месяцев. Подробности описать невозможно, перечислю основные события:
- Сгорел контроллер, который шел в комплекте.
- Потом сгорел еще один такой же. Моей вины в этом, вроде бы, не было.
- Оборвалась обмотка одного из штатных моторов. Видимо, в процессе припайки проводов к мотору. Делать это было крайне неудобно, а тоненькие проводки торчат в уязвимых местах. Разобрать мотор для ремонта не получилось.
- В третьем купленном контроллере подвеса (есть еще четвертый, пока не востребован) не работал датчик (где гироскопы и акселерометры). Куплен новый датчик.

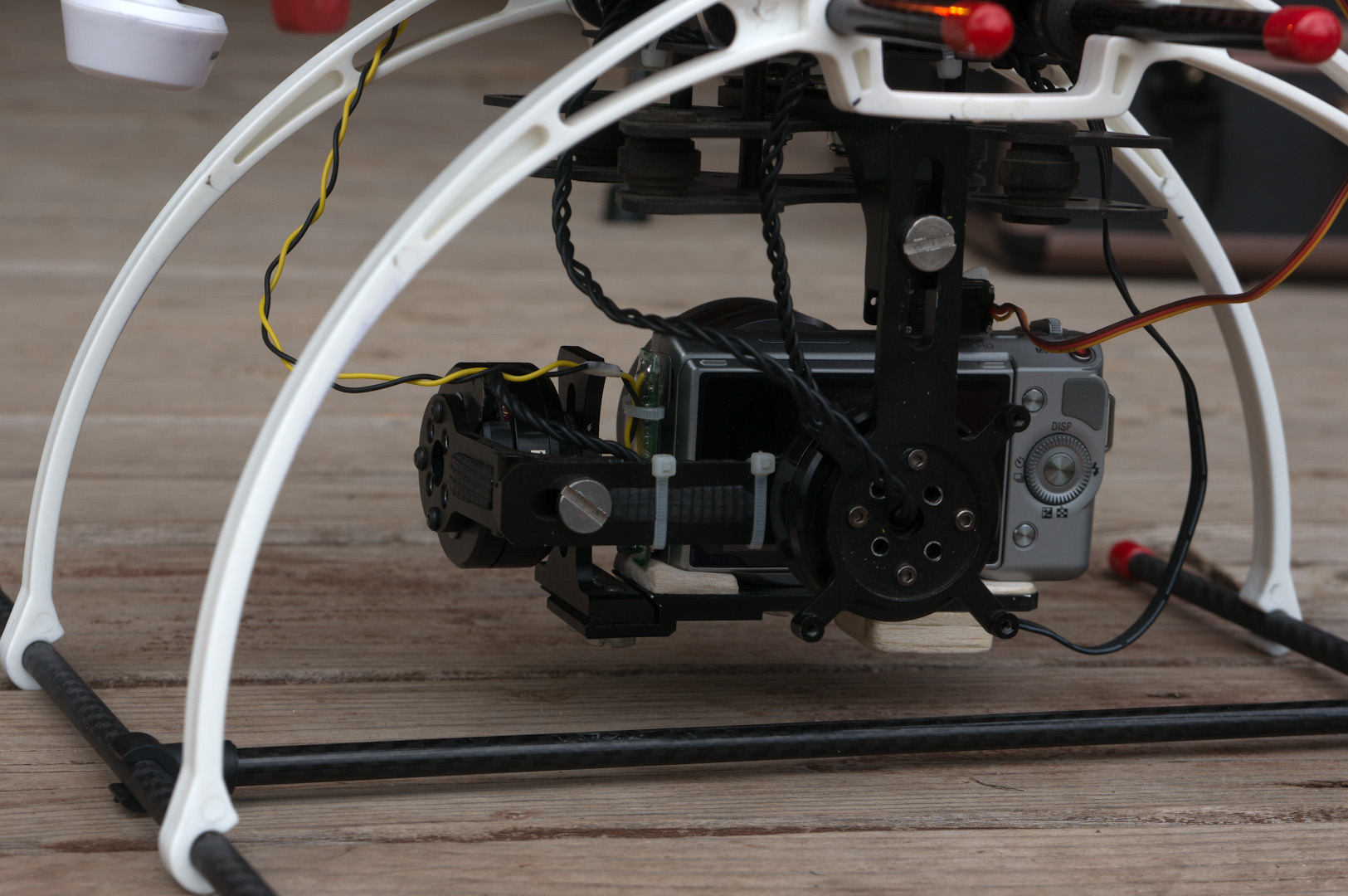
NEX-5 на подвесе
Видны конвертер HDMI -> AV, сервомашинка спуска, подкладки из бальсы
В итоге:
- Моторы заменил на Tiger GB36-1. Тоже неидеальны. Через некоторое время один стал заедать. Подшипник (закрытый) оказался забит какой-то дрянью. Подшипник разобрал, промыл, смазал. Для установки моторов пришлось пересверлить отверстия в подвесе.
- Контроллер использован с прошивкой AlexMos, которую получилось обновить до версии 2.4.
- Штатные круглые гайки с осями 3/8" (тяжелые) заменены на штативные винты с такой же резьбой.
- Контроллер установлен на самодельной карбоновой пластине, через которую подвес крепится к раме. Там он хорошо защищен от повреждений. Это два раза выручало, когда при жесткой посадке подвес попадал в землю как раз тем местом, где штатно располагался бы контроллер. Гнуло при этом немного вертикальный алюминиевый рычаг подвеса. Легко исправлялось.

Подвес. Вид справа
Мотор Roll. “Домик” для датчика. Полый вал мотора позволяет хорошо проложить провод к мотору Pitch.
Камера крепится к рычагу подвеса обычным штативным винтом, но встает левым и правым краем на площадки из бальсы, которые предотвращают сдвиг камеры в полете. Для датчика, приклеенного к нижней стороне рычага pitch подвеса, построен “домик” из бальсы, который защищает датчик от повреждений - он довольно близко от земли.
БК-подвес. Вид сзади
Видны неиспользованные штатные отверстия крепления моторов и штативные винты, заменившие круглые гайки со стальными осями
Управление камерой
Вначале пробовал использовать инфракрасный спуск. Дома работало кое-как. Но на улице в полете никак не получилось. Закрывал инфракрасный светодиод от наружного света - ничего не вышло. Плюнул. Приклеил сверху на камеру сервомашинку на двухсторонний скотч - просто нажимает механически кнопку спуска (можно с полунажатием). Управляется трехпозиционным переключателем на пульте. Работает безотказно.
Наклон камеры по pitch управляется крутилкой на пульте. Настроено на углы от 0 (горизонтально) до 90 градусов (вертикально вниз).
Устранение вибраций подвеса
Долгое время не удавалось избавиться от сильной вибрации камеры по оси yaw (на которой нет мотора, подвес двухосевой). Для изучения характера вибраций ставил на рычаг лазерную указку и наблюдал ее след на баскетбольном щите в полете. След был горизонтальный. Убрать вибрацию удалось удалением 8 резиновых демпферов из 12 штатных. Сейчас в виброразвязке 4 демпфера, работающих на сжатие. По-видимому, дело в резонансе, возбуждаемом вибрациями рамы по yaw. Вообще-то, вибрации рамы небольшие, но при совпадении частот при жесткой виброразвязке попадало в резонанс.
FPV
В системе FPV использованы:
- Конвертер HDMI - AV. Работает нормально. И, как не удивительно, при выходе с двумя проводками (черный и желтый) на земле получаю и видео и звук. Объясните, кто знает, как такое может быть.
- Видео передатчик Boscam 5.8ГГц 400мВт с замененной штатной антенной на клевер.
- Приемник Boscam RC805 с антенной клевер.
- Рекордер XBox HD Recorder.
- Монитор Foxtech 7".

Кейс с аппаратурой
Сейчас там еще живут GPS-трекер и рекордер
Аккумуляторы
Изначально планировалось при полетах с камерой использовать аккумуляторы 5Ач 4S. Расчетное время висения при этом получалось около 10 минут. Не много, но для фотосъемки достаточно. При полетном весе 2600г примерно так и получается. Специально время не засекал, но есть запись реального полета 11 минут.
Обнаружилось, однако, что из 4-х аккумуляторов Zippy Flightmax 20C два (из одной партии) после нескольких циклов немного вздулись и с токоотдачей у них не очень. При полете в ветер индикация падения напряжения начинает мигать сразу после взлета на полностью заряженной батарее. Два других (из другой партии) ведут себя нормально. Недавно купил аккумулятор подороже Revolectrix 5200мАч 40С. При первом тестовом полете нечаянно просадил одну банку до 2.85В, но в дальнейшем все зарядилось и работает отлично. Время полета 12 минут. Думаю купить еще такой же или даже 9000Ач, с которым по расчету время полета должно быть около 15 минут.
Разъемы
В первом варианте аппарата для аккумуляторов использовались разъемы XT60. Но мне никогда не нравилось как они разъединяются. Разъемы маленькие и часто тугие, захватиться как следует трудно, при разъединении получается рывок, что создает риск оторвать провода. Когда на батареях 5Aч оказались разъемы bullet 4mm (HXT 4mm) заменил их поначалу на XT60. Но толстые провода 10AWG припаять к XT60 получилось плохо. Места пайки на XT маленькие, тонкие, пластмасса хоть и термостойкая, но плывет. А потом еще обнаружилось, что некоторые партии XT60 бывают довольно слабые, а другие - тугие. В итоге все разъемы заменил на bullet 4mm (HXT 4mm). Паять их намного удобней. Соединяются-разъединяются плотно, но мягко, никакого рывка - там пружинки. Очень доволен.
Перевозка. Чемодан
Вертолет, увы, не складной. При ближних поездках, если пассажиров мало, он едет на переднем пассажирском сиденье. Для дальних поездок купил чемодан. Самый большой и самый дешевый из тех, что были. На колесах. Предварительно измерил габариты с пропеллерами и шасси (а также подвесом и камерой). Из нескольких слоев толстого поролона (точнее, пористой термоизоляции) вырезал и склеил мягкую вставку в чемодан. В нее помещается вертолет в полной готовности к полету, есть отсеки для батарей, зарядки, проводов к зарядке.

Чемодан
В крышке тоже лист поролона
Чемодан, конечно, здоровый и в багажнике Форда Фокус занимает много места. Но для багажа у меня еще есть большой бокс Thule на крыше, поэтому все более-менее помещается. А чувствует себя коптер в чемодане хорошо. Проехал там уже больше 2 тысяч километров.

Полетный комплекс готов к перевозке
Чемодан с вертолетом, штатив, кейс с аппаратурой
Технические характеристики вертолета
Рама DJI F450
Моторы Tiger MT3506 650kv
Регуляторы DJI 30А Opto
Пропеллеры APC MR 12", шаг 4.5"
Полетный контроллер Naza M V2 с GPS
iOSD mini
Видеопередатчик Boscam 5.8Ггцб 400мВт, антенна клевер
Двухосевой БК-подвес:
Механика DYS
Моторы Tiger GB36-1
Контроллер AlexMos 2.4
Камера Sony NEX-5 с объективом 16мм
Вес подвеса с камерой 800г
Полетный вес (с аккумулятором Revolectrix 5200мАч 40С) 2700г
Полетное время 12 минут.
Фотографии
Начиная с мая сделал немало вылетов для фотографирования. Но не так много, как планировал. Технически все нормально. Но бывает стремно раскладываться со всем этим хозяйством в людных местах. Не в том смысле, что над людьми летаю. Не летаю. Но не нравится, когда на стартовой площадке собираются зеваки. Во-вторых, поначалу было стремно поднимать в воздух аппарат, на который вместе с камерой потрачено немало десятков тысяч рублей. Да и подходящую точку взлета бывает непросто найти, чтобы с хорошего ракурса снять ту или иную достопримечательность. Поначалу съемку делал в таком режиме: взлетел вверх немного спереди от себя, сфотографировал с разной высоты, сел. Сейчас, когда вижу, что все работает надежно (тьфу, тьфу, тьфу) и аккум хороший, уже отлетаю подальше и получаю больше свободы в выборе ракурса. На втором из приведенных ниже снимков можно разглядеть пилота в темной одежде на треугольном мысу в левой части кадра.
Оказывается также (это можно было прогнозировать), что аэроснимки не так часто обладают какой-то художественной ценностью. Чаще они интересны только тем, кто с объектом и местностью знаком.
Вот две фотографии, выложенные в открытый доступ. Первая - это моя родная деревня, вторая может быть интересна и сама по себе.
…wikimedia.org/…/Goritzy_September_2014.… (1.1 MB)
Горицы. Осень

На закате. Ферапонтово
Ферапонтов монастырь с фресками Дионисия входит в список всемирного наследия ЮНЕСКО
Комментарии модерируются.
