Байчи для самых маленьких.
Напишу пару строк в первую очередь для себя, а во вторую для тех, кто хочет попробовать прошивку Байчи для облегчения входа.
Оговорюсь сразу - это не мануал, как надо делать, это описание моего опыта.
Все опыты проводил на передатчике и приёмнике OrangeRX от Хоббикинга. Если у вас комплект от Flytrone - это тоже самое. Прошивки для передатчика 1 ватт и 100 милливатт одинаковые.
У Байчи есть прошивки и для других передатчиков и приёмников.
Что конкретно и для чего описано на странице ниже и в файле read.my
Тут расположен оригинальный мануал на передатчик.
Тут расположен оригинальный мануал на приёмник.
Итак, вот мой архивчик со всем необходимым для загрузки.
Подразумевается, что мы уже умеем подключать передатчик и приёмник и прошивать в него пусть тот-же OpenLRSng.
Если нет - то на Байчи ещё немного рановато.
Итак, у нас уже установлен Google Chrome и в него добавлен конфигуратор OpenLRSng.
На всякий случай в архиве есть папка с конфигуратором на русском языке.
Подключаем передатчик, запускаем конфигуратор.
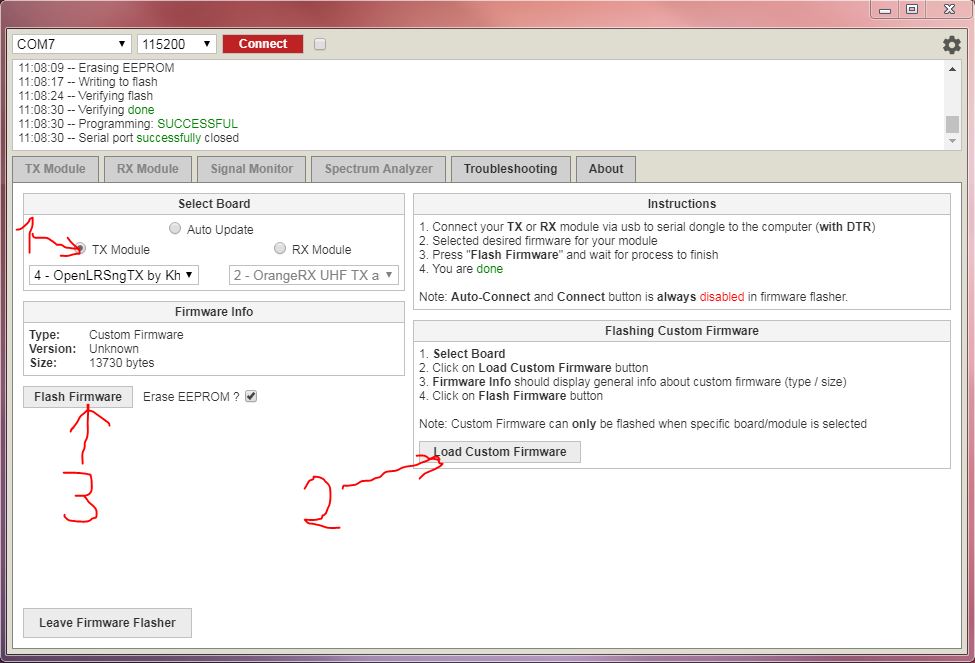
Нажимаем “Firmware Flasher”.
Там ставим точку в чекбоксе “TX Module”, но в выпадающем списке ничего не выбираем.
Нажимаем “Load Custom Firmware”, выбираем в архиве файл TX.hex (либо RX as TX.hex, если хотим прошить модуль приёмника в качестве передатчика) и затем “Flash Firmware”.
Сверху в окне лога должны быть такие строки.
11:01:06 -- Serial port successfully opened with ID: 1
11:01:06 -- Chip recognized as ATmega328P
11:01:06 -- Erasing EEPROM
11:01:15 -- Writing to flash
11:01:21 -- Verifying flash
11:01:27 -- Verifying done
11:01:27 -- Programming: SUCCESSFUL
11:01:27 -- Serial port successfully closed
Если всё так, значит передатчик у нас успешно прошит.
Сразу прошьём и приёмник.
Алгоритм действий точно такой-же, только ставим точку в чекбоксе “RX module”.
Прошивку, соответсвенно, выбираем RX.hex (аналогично, если хотим прошить передатчик в качестве приёмника - то TX as RX).
Теперь можно переходить к настройке.
Вновь подключаем передатчик.
В архиве есть терминальная программа “PUTTY”.
Открываем папку, запускаем PUTTY.exe
Можно вести ярлык в удобное место - программка нам часто пригодится в процессе настройки.
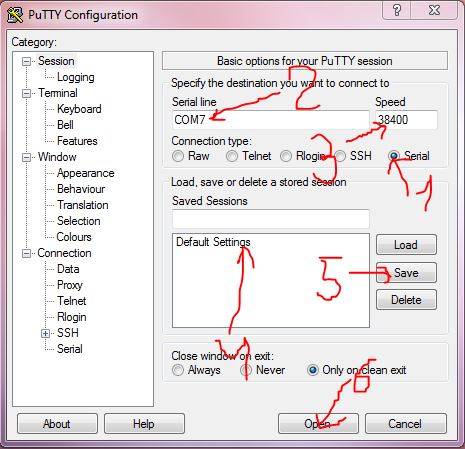
Видим перед собой стартовое окно терминала.
Выбираем “Serial”, пишем номер нашего COM порта (пишем циферку - никаких чекбоксов. Это терминал, детка).
Speed пишем 38400. Затем выделяем пункт Default setting и жмякаем “Save” - теперь не надо будет вводить всё это повторно.
В идеале увидим вот такое окно.
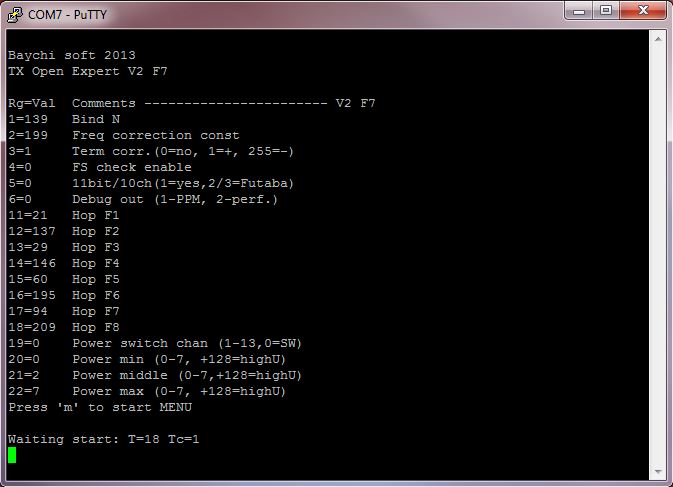
Тут нам стОит познакомится со словом, которым профессионалы пугают новичков - регистры.
На самом деле регистр - это просто номер строки. У каждой строки есть значение - цифра после номера регистра.
Например первая строчка “1=139” Значение первого регистра - 139. Дальше идёт описание, для чего этот регистр нужен.
Вся настройка заключается в смене этих самых значений регистров.
Чтобы изменить значение регистра в терминале нужно набрать сначала номер регистра - например 3, нажать ENTER, потом нужное нам значение - например 0 и снова ENTER.
Значение поменяется.
Иногда у меня бывает так, что все значения регистров - 255. Тогда придётся менять их все вручную.
Чтобы менять их нам нужно войти в меню.
Просто нажимаем “M” или “m” в английской раскладке и ENTER.
У меня терминал всегда запускается в русской раскладке.
Теперь мы можем менять регистры, но пока рано…
Набираем команду “rebind” и нажимаем ENTER.
Подтверждаем “y” и снова ENTER.
Будут строки:
Try to new bind...
Freq/noise: 12/41 140/42 45/38 147/43 75/46 198/44 113/42 215/43
Bind N=1
У вас N будет равно другому значению - это приёмник просканировал эфир и выбрал для работы наиболее чистый канал.
Регистры с 11 по 18 - это тоже выбранные приёмником каналы для “прыжков”. Сильно заморачиваться не будем, оставляем всё как есть.
Если будет сообщение “to noise!” - значит что шумовая радиообстановка слишком плоха - много помех. Можно пробовать ещё и ещё - вероятнее всего в какой-то момент передатчик найдёт себе более-менее чистый канал.
И так, по регистрам.
1 - разобрались. Номер канала привязки.
2 - коррекция частоты. Пока оставляем 199, потом мы к этому регистру вернёмся.
3 - Тепературная компенсация. Форумчане сказали, что никто не знает как оно работает и рекомендовали её отключить. Для отключения этому регистру нужно присвоить значение 0. (3 - ENTER, 0 - ENTER).
4 - отключает передачу при обнаружении FailSafe. Просто оставляем 0 и двигаемся дальше.
5 - Если мы хотим использовать PWM или PPM - оставляем 0, если SBUS - 2.
6 - Отвечает за выдачу отладочной информации. На функционал не влияет, можно будет поиграться потом, когда достаточно хорошо разберётесь с прошивкой.
11-8, как говорилось выше, каналы для “прыжков” Тут нам менять ничего не нужно.
19 - управление мощностью передатчика. Если вам зачем-то нужно понижать мощность передатчика, то это можно делать, например, с трёхпозиционного тумблера на пульте. Значения с 1 по 13 - это выбор канала, к которому в аппе привязан этот тумблер. Если поставить регистр 0 - будет работать физический переключатель на модуле. У Оранжа такого нет, но у Байчи есть рецепт, как можно приделать.
Если присвоить регисту значение 14 - то передатчик просто будет работать на максимальной мощности (точнее на мощности, прописаной в регистре 22).
20 - мощность передатчика при положении тумблера “минимально” - от 0 до 7. 0 - надо понимать, передача отключена, 1 - самая низкая мощность - 7 - самая высокая.
21 - всё тоже самое, что и для 20, но только для положения тумблера “средняя”.
22 - Значение для мощности “максимально”. Разумно, конечно, поставить тут максимум - 7. Кроме того, если в регистре 19 выставлено значение 14 (отключено управление мощностью). то мощность передатчика будет именно такая, как прописано в этом самом регистре 22.
Для, например, настроечных действий тут можно прописать минималку (у меня вот колонки у компа трещат при передаче, хотя понижение мощности не сильно помогает). Главное потом в боевых условиях не забыть вернуть параметр в максимальное значение.
Собственно, на этом настройка передатчика закончена.
Не плохо будет заскриншотить окно терминала с настройками - оно нам пригодится в будущем.
Можно ещё посмотреть шумовую обстановку.
Набираем “N” - у нас выскакивает три столбика цифр. (Четыре - первый столбик просто номер канала).
Цифры в столбиках должны быть как можно меньше. в последнем столбике, к примеру, хорошими значениями считается 30-40. Если 80 - плохо. Если выше 100 - то так летать нельзя. Помехи забьют всё управление. Борьба с шумами на модели - тема отдельной диссертации.
Отключаем передатчик от компьютера, вставляем в аппаратуру и включаем последнюю.
Если всё нормально и есть входящий протокол, то на модуле должен мигать диод.
Теперь можно подключать приёмник.
Подключив его к терминалу после прошивки сначала побегут непонятные строки:
$RL13 S=0 C=5 Rn=44
$RL14 S=0 C=6 Rn=47
$RL15 S=0 C=7 Rn=47
$RL16 S=0 C=8 Rn=42
$RL17 S=0 C=1 Rn=47
$RL18 S=0 C=2 Rn=43
Не обращаем внимания.
Меняем раскладку и так-же жмём “M” и ENTER.
Надо добавить, что на это действо у нас есть только 10 секунд. Не успели - переподключаем.
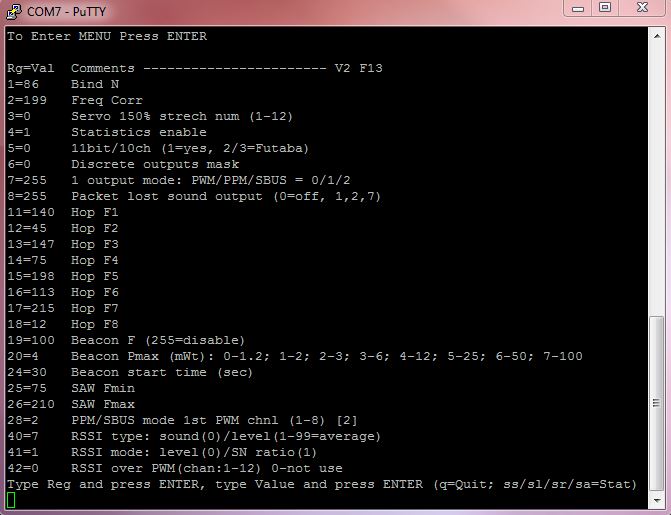
Нас встречает уже чуть более обширное меню.
Первое, что мы делаем - включаем стоящий в сторонке передатчик в “боевой” режим и набираем уже знакомую нам команду “rebind”.
Видим примерно такие строки:
Bind find start: Maxlevel[66]=57
Bind find start: Maxlevel[70]=60
Bind find start: Maxlevel[45]=190
45 75 215 12 198 147 113 140
Times: 1 4 5 2 0 3 6
Bind=1 Fcorr=197 Sequence: 45 147 75 198 113 215 12 140 End
$RL16 S=0 C=8 Rn=49
R=0 S=0 C=1 A=255 Rn=50
R=222 S=1 C=2 A=0 Rn=45
R=223 S=1 C=3 A=0 Rn=46
R=220 S=1 C=4 A=0 Rn=40
R=222 S=1 C=5 A=0 Rn=43
R=220 S=1 C=6 A=255 Rn=40
R=226 S=1 C=7 A=0 Rn=40
R=222 S=1 C=8 A=0 Rn=41
R=225 S=1 C=1 A=0 Rn=41
И так до бесконечности.
Перетыкаем передатчик, снова входим в меню и видим, что значения регистра 1 у нас теперь совпадает со значением этого-же регистра в приёмнике.
Если вдруг нет - то присваиваем это значение вручную (тоже самое, что и в передатчике).
Всё, система у нас условно забиндена. Почему условно? Потому что у нас не совпадают каналы для “прыжков”.
Открываем сохранённый скриншот и прописываем регистры с 11 по 18 вручную.
Теперь регистры 1 и с 11 по 18 у нас в приёмнике и в передатчике совпадают.
По идее регистр 2 - подстройка частоты, так-же должен совпадать с таким-же в передатчике (199), не должен. У меня после ребинда он стал 198 и я оставил это значение - позже скажу почему.
С первым и вторым регистром разобрались.
3 - расширение работы сервопривода - нам эти дебри не нужны. Оставляем 0.
4 - Сбор статистики работы приёмника. Полезная штука для отладки. Как оно работает лучше почитать в официальном мануале. Но есть одно НО. Оно пишет свой лог в EEPROM АТМеги, а количество циклов записи в неё ограничено. Причём не очень-то большим количеством этих самых циклов. В общем, при значении 1 - запись ведётся, при значении 0 - запись запрещена.
5 - Тоже самое, что и в передатчике. Ставим 0 - если хотим использовать PWM, или PPM и 2 если хотим использовать SBUS.
6 - просто оставляем 0 и двигаемся дальше.
7 - собственно, режим выхода. Если будем использовать PWM - 0, PPM - 1 и если хотим SBUS - 2.
8 - тоже просто оставим 0 и идём дальше.
11 - 18 регистры мы уже настроили на стадии бинда.
19 - Маяк. Значение 0 соответствует 433.075 МГц. Это первый канал LPD диапазона. Значение 255 отключает маяк.
20 - Мощность передачи маяка. Принцип тот-же, что и с мощностью передатчика. Значения от 0 до 7, где 7 - максимальная мощность.
24 - Время в секундах до старта вещания маяка после потери связи. От 0 до 255 секунд.
25 и 26 - границы SAW фильтра. Оставляем как есть.
28 - Сдвигает линейку PWM импульсов при активированном PPM или SBUS. Просто оставляем 2 - это удобно и адекватно.
40 - Переключение режима RSSI звук (0) либо аналог (1-99). По умолчанию коэффициент усреднения уровня 7 - его и ставляем.
41 - Режим аналогового сигнала RSSI. При 0 - выводится обычный аналоговый RSSI. При 1 - соотношение сигнал\шум. Оставим 1.
42 - Инжекция RSSI в канал управления. Значениями от 1 до 12 можно назначить канал, в котором вместо сигналов управления будут передаваться значения RSSI. При значении 0 эта функция отключена.
На этом настройка приёмника закончена.
Но есть ещё один момент, за счёт которого, как заявлено, мы и получаем заветные +30% дальности.
Подстройка частоты. Тот самый регистр 2 в передатчике и приёмнике.
Тут уместнее будет скопировать строки из официального мануала.
На приемнике можно подстраивать поправку частоты в рабочем режиме. Для этого после включения питания входят в меню, задают значение R2=0, выходят из меню (‘q’) при заранее включенном (для прогрева на 5-10 мин) передатчике. Наблюдая значение параметра A=, меняют поправку частоты клавишами ‘<’ и ‘>’, так чтобы она стала 0 или 255. Затем нажимают клавишу Enter и поправка запоминается.
У меня после ребинда значение регистра 2 в приёмнике стало 198, а значение A=0 в большинстве строк.
Ну и клавиши “<” и “>”, как судя по отзывам и у многих, у меня не заработали. Надеюсь в комментариях знающие отпишутся как сделать так, чтобы всё работало.
На этом первоначальная настройка окончена.
Немного о подключении.
На стороне передатчика, в соответствии с выбранным протоколом в передатчике такой-же, соответственно, нудно выбрать и в аппаратуре.
Если в передатчике PWM или PPM, то в аппе, соответственно, PPM. Если в передатчике SBUS - то SBUS и в аппаратуре.
Приёмник.
Сначала надо определиться, что называть первым каналом. Технически - первый канал этот тот, с которого практически всегда снимают аналоговый RSSI (пин Меги D3). Так что де-факто первым каналом часто называют технический второй (пин D5). Именно с него в прошивке Байчи и снимается PPM и SBUS в зависимости от выбранного режима. Дальше идут обычные PWM выходы (Как раз регистр 28=2 и назначает, что первый PWM канал будет на фактически втором (а технически на третьем) пине. После того, с которого снимается PPM.
Немного запутано, но большинству и не надо. Просто втыкаем PPM\SBUS в пин, следующий после RSSI радуемся жизни.

Ещё коротко о FailSafe.
В рабочем режиме просто на 5 секунд зажимаем кнопку на передатчике.
Текущее положение стиков, тумблеров и крутилок будет запомнено в приёмнике как положение FS. При потере всязи приёмник установит всё точно так-же. Ну а уж что с этим делать - вам решать.
Надеюсь, что в комментариях знающие люди выскажут свои поправки и дополнят то, что я упустил.
