Контроллер скорости Markus SL45: покупка, установка, настройка и тестирование
Целью данной статьи является подробное описание полученных мною знаний при подготовке контроллера скорости Markus SL45 к эксплуатации. Я столкнулся с множеством вопросов, и уверен, что публикация ответов на них поможет новичкам, как я, сохранить время и силы. 😃
Почему Markus? Честно скажу, выбрал только потому, что при многих равных характеристиках, это российская разработка. Почитал форумы, вроде негативных отзывов нет. Еще и сына моего зовут Маркус. 😃
Для мотора Turnigy 2836 Brushless EDF Motor 3200kv, который стоит на моем вертолетике, крайне сложно найти развернутые характеристики. На китайском сайте указана максимальная мощность 650 Ватт. Даже если тут правды только наполовину, то все равно максимальный ток может достигать 35А при использовании аккумуляторов Li-Po 3S. Я выбрал номинальный ток контроллера скорости с запасом на будущее - 45А. Может когда-нибудь дорасту до 500-ки. 😃
Встала задача - купить контроллер. Как оказалась, это достаточно непросто. У половины московских интернет-магазинов контроллера не было на складе. Из оставшихся только три принимали VISA к оплате. Из этих трех только у одного была доставка за пределы России. Но вот цена доставки повергла в шок - 3600 рублей! 😵
Пришлось заказывать в Америке. На сайте gobrushless.com контроллер был в наличии, да и доставка стоила гуманные $14.14. Я сразу заказал USB адаптер для программирования с помощью компьютера. Всё вместе получилось $121, что не дешево, конечно, но терпимо.
Через неделю заказ пришел. К тому времени у меня уже начались непонятные проблемы со старым контроллером, поэтому откладывать установку Маркуса на вертолет я не стал.
С распайкой контактов проблем не было, плюс и минус силовых проводов перепутать сложно. Контроллер достаточно большой, но в раму моего клона влез без проблем.
Так как планировалось использовать аккумуляторы 4S, то сразу к силовым разъемам был припаян внешний BEC, а из сигнального провода контроллера убран центральный (красный провод).

По окончанию монтажных операций настала очередь программной настройки контроллера. Для этого необходимо:
- Скачать ПО с сайта производителя.
- Установить драйвер адаптера.
- Подключить адаптер к USB порту компьютера.
- Запустить программу MESC.
- Открыть окно настроек (иконка с гаечным ключом и молотком) и выбрать COM-порт с максимальным значением (у меня получился COM12).
- Подключить сигнальный провод контроллера к адаптеру.
- Подключить силовую батарею к контроллеру.
Программа считает текущие настройки контроллера и отобразит их в окне. У меня это выглядело так:
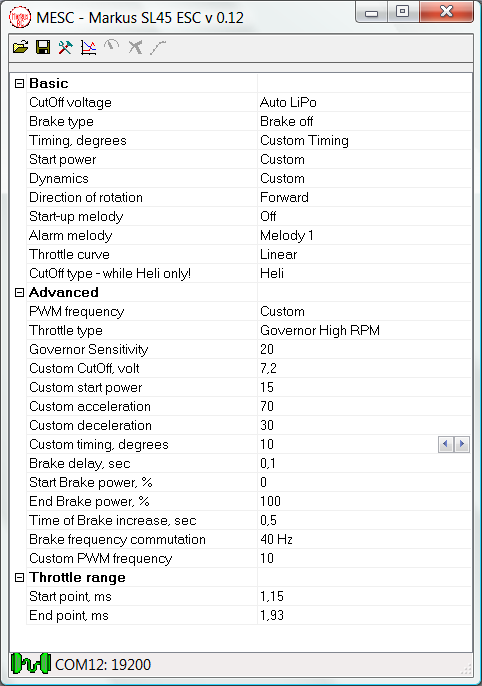
Далее началось самое сложное. Необходимо было правильно и с пониманием настроить параметры контроллера под тот мотор, который у меня имеется.
Я пройдусь по всем параметрам и постараюсь описать их значение. Частично информацию возьму из документации, частично из переписки с разработчиком, частично из иностранных форумов и статей.
На момент написания статьи версия прошивки имела номер 0.12. По мере обновления прошивок я буду дополнять/редактировать описание.
CutOff voltage - отсечка по напряжению питания:
- 5,0v 6-7 элементов NiCd/NiMh
- 6,0v 7-9 элементов NiCd/NiMh или 2 элемента LiPo
- 9,0v 10-12 элементов NiCd/NiMh или 3 элемента LiPo
- 12,0v 13-16 элементов NiCd/NiMh или 4 элемента LiPo
- 15,0v 5 элементов LiPo
- 18,0v 6 элементов LiPo
- выключено отсечка отключена
- “АutoLiPo” автоматическое определение батареи от 2 до 5 элементов LiPo
Я поставил AutoLiPo, так как использую аккумуляторы 3S и 4S. Если же аккумуляторы всегда одного типа, то более правильно будет установить значение отсечки вручную.
Brake type - тип тормоза. Для вертолетов надо всегда ставить Brake Off.
Timing, degrees - угол опережения электромагнитного поля, так называемое скольжение. Это очень важный параметр синхронного двигателя. Правильно подобранное значение скольжения выведет работу двигателя в оптимальный режим. Угол опережения зависит от количества полюсов магнитов в роторе двигателя. В документации рекомендации следующие:
- 3 град. для 2 полюсных моторов
- 7 град. для 2 полюсных моторов
- 12 град. для 2-4 полюсных моторов
- 17 град. для 4-10 полюсных моторов
- 22 град. для 6-14 полюсных моторов
- 27 град. для 10-14 полюсных моторов
В то же время на форуме www.helifreak.com рекомендуют использовать более низкие значения. Я поставил опережение в 23 градуса.
Так же угол опережения надо выставлять в зависимости от значения напряжения. Я заметил, что для достижения высокой точности поддержания оборотов необходимо при повышении напряжения так же немного увеличивать угол опережения. 23 градуса - это для батареи 4S. Для 3S можно поставить 18-20 градусов.
Для справки:
Принцип работы бесколлекторного двигателя, основан на том что контроллер скорости так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки статора и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор. Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например у двигателя с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора.
Start power – мощность старта. Я не совсем понял, на что это влияет в моем случае, а задумано это для того, чтобы регулировать величину потока, генерируемое обмотками статора при запуске двигателя. В моем случае значения от 1 до 50 ничего не меняют. Зависимость прямая, чем больше значение параметра, тем больше энергия старта.
Dynamics – вот этот параметр определяет скорость нарастания и уменьшения оборотов. Именно им можно добиться плавной раскрутки ротора. Необходимо установить параметр Custom и в разделе Advanced задать значения Custom Acceleration и Custom Deceleration. В моем случае плавная раскрутка ротора получилась при значении 70 для Custom Acceleration.
Важное замечание - значения Custom Acceleration и Custom Deceleration имеют обратную шкалу, то есть меньшее значение параметра задает бОльшую скорость увеличения или уменьшения оборотов.
При переходе в режим Hold (остановки) двигатель останавливается мгновенно независимо от настройки параметра Custom Deceleration.
Direction of rotation – тут все понятно, можно программно поменять направление вращения ротора двигателя. Мне повезло, я сразу удачно припаял клеммы с красной и черной термоусадками.
Start-up melody – отключил сразу, чтобы не пиликало не по делу.
Alarm melody – пусть привлекает внимание.
Throttle curve – кривая газа. Тут разработчик мне не сообщил, каковы значения экспонент А и Б. Он просто сказал, что в моем случае надо поставить линейную зависимость. Как я и сделал.
Cut-off type – тип отсечки при падении напряжения питания. Тут всего один вариант – “вертолетная”, т.е. плавное снижение оборотов.
PWM frequency – Частота ШИМ. Тут тоже все не просто. Это значение зависит от характеристик двигателя, а вот производители двигателей не всегда указывают необходимые параметры. Поэтому надо или искать аналоги, или подбирать значения опытным путем.
При меньших значениях параметра возникает очень широкий диапазон колебаний оборотов в режиме гувернера, до 10%, что неприемлемо. При бОльших значениях так же возникают колебания, двигатель сильно греется и перестает адекватно работать параметр Custom Acceleration. Правильно подобранная частота ШИМ позволяет очень точно поддерживать обороты двигателя и увеличивает КПД двигателя. К сожалению, без приборов телеметрии оптимально настроить частоту ШИМ очень сложно.
Так же рекомендую повышать частоту ШИМ при повышении питающего напряжения. Для батареи 4S я ставлю 22 кГц, для 3S - 10 кГц.
Throttle type – тип канала газа. Нас в этом пункте интересует прежде всего режим поддержания постоянных оборотов, или гувернера. Реализуется он достаточно хитро. Существуют два параметра: Governor High RPM и Governor Low RPM. Оба они задают скорость вращения электромагнитного поля в пределах значения канала газа от 20% до 80%. В этих режимах обороты двигателя не зависят от напряжения силовой батареи и от kV двигателя (важно, чтобы напряжение батареи не было ниже необходимого), преимущество 4S перед 3S будет проявляться только в бОльшей мощности потока на обмотках статора. Это очень удобно, так отпадает необходимость создания раздельных конфигураций для 4S и 3S в передатчике. Кривая газа для различного напряжения питания будет одинакова. Однако надо учитывать возможности батареи и kV двигателя. Контроллер не может поднять напряжение выше, чем выдает батарея. Если напряжения батареи будет недостаточно для заданных оборотов, то контроллер будет держать максимально возможные обороты для напряжения, получаемого от батареи.
Итак, по информации от разработчика в режиме Governer Low RPM обороты по полю составят от 14500 до 49000 об/мин, в режиме Governer High RPM - от 50000 до 175000 об/мин. Обороты на валу двигателя будут равны оборотам по полю деленным на количество пар полюсов двигателя (как правило - количество магнитов / 2). Зная количество пар полюсов магнитов в роторе, не сложно рассчитать необходимое значение канала газа для поддержания желаемых оборотов.
Я столкнулся с проблемой, как же узнать, сколько в двигателе пар полюсов. Посмотрел на него снизу – там только видны обмотки статора (двигатель outrunner, т.е. центральная часть неподвижна).
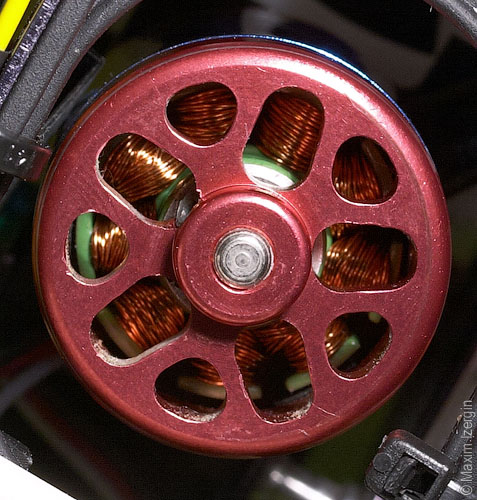
Потом до меня дошло, что магниты должны быть на стенках подвижного корпуса. И действительно, присмотревшись, я увидел шесть тонких пластин. Значит у меня три пары полюсов двигателя.
Далее все считается очень просто. Мне необходимо поддерживать 2800 об/мин на основном роторе. Стоит пиньон с 10-ю зубьями, основная шестеренка на 150 зубьев, получается, что обороты двигателя должны быть 2800*(150/10) = 42000 об/мин.
Тогда необходимое значение канала газа вычисляется по формуле:
Газ(%) = (обороты двигателя*(количество полюсов/2)-обороты гувернера при 20%)*(80-20)/(обороты гувернера при 80% - обороты гувернера при 20%) + 20.
В моем случае это x=(42000*(6/2)-50000)*(80-20)/(175000-50000)+20
Получаем х = 56,48%. Так как эффективность двигателя не бывает 100%, то я установил полку газа в значение 60%, на всякий случай.
Кривая газа в нормале получилась 0 60 60 60 60. Для режима IDLE1 я установил 3000 об/мин для основного ротора. Кривая газа получилась совсем прямой - 63 63 63 63 63. 😁
Прошу отметить, что мои настройки подразумевают использование батареи 4S. Поэтому рассчитывайте значение газа аккуратно, а не копируйте мои значения бездумно. Иначе контроллер будет работать неправильно, а вы расстроитесь. А я не хочу, чтобы вы расстраивались.
Governor sensivity – чувствительность говернера. Чем меньше число, тем быстрее реакция гувернера, но выше вероятность возникновения автоколебаний после резких перекладок. Чем выше напряжение питания, тем ниже должна быть чувствительность гувернера. Я поставил значение 30 для батареи 3S и 50 для 4S.
При изменении параметров контроллера запоминание происходит сразу, автоматически.
Обновление прошивки производится в программе MESC. Предварительно скачанную с сайта прошивку (файл с расширением upd) необходимо поместить в каталог управляющей программы. Затем после запуска программы и при подключенном контроллере (т.е. когда мы можем настраивать параметры) необходимо нажать <Ctrl+F> и выбрать необходимое обновление.
После обновления все настройки контроллера сбрасываются в значения по умолчанию.
Светодиодный индикатор на контроллере дублирует писки мотором при проигрывании мелодий и программировании с передатчика, загорается при длительности сервосигнала большей значения максимального газа и начинает помаргивать при отсечке. Помаргивание при отсечке заметить сложно, надо ставить более эффективные индикаторы разряда батареи. А вот оповещение о превышении максимального газа очень полезно. На практике это означает, что если напряжения батареи для поддержания заданных оборотов не хватает, то загорается светодиод. Хитрость в том, что работа гувернера не зависит от параметра kV двигателя, а только от количества пар полюсов магнитов. Если у меня, например, два двигателя, один 3200 kV, другой 4000 kV, то установки гувернера для обоих будут одинаковы (с учетом того, что пиньен на обоих двигателях стоит одинаковый). Но вот напряжение потребуется разное. Если мне необходимо 3000 об/мин на роторе, а пиньон у меня с 10-ю зубьями, то для двигателя 3200 kV необходимо 14 Вольт, а для двигателя 4000 kV - 11,25 Вольт. В первом случае батареи 3S не хватит - будет гореть светодиодный индикатор на контроллере, а обороты будут зависеть от текущего напряжения батареи (т.е. понижаться при разряде). Если поставить 4S, то все будет в порядке, пока напряжение не упадет ниже 14-и Вольт. Во втором случае гувернер будет уверенно держать необходимые обороты при использовании батареи 3S. Надо так же учитывать эффективность двигателя. После покупки телеметрии, я могу точно сказать, что при расчете значения газа для режима гувернера необходимо добавлять 5-10% к расчетному значению. У меня двигатели с более низким kV имеют более высокую эффективность. Конкретно Turnigy 2836 Brushless EDF Motor 3200kv требует поправки на 4% в плюс.
Подлет состоялся вечером. Был очень сильный ветер, порывами ломало ветки на деревьях. Думаю, что доходило до 20-25 м/с. Но висеть было хоть и страшно, но возможно. Ротор вращался с постоянной скоростью, провалов при резких подъемах не было. Заметил, что при равном времени полета, режим гувернера расходует больше энергии, чем полет по кривым. Хотя может дело в сильном ветре, надо проверять дальше.
Как я писал выше, настройки работают с аккумуляторами 3S и 4S без корректировок. При 4S стабильность оборотов выше, чем при 3S. Тут уже сказываются возможности аккумуляторов выдавать нужный ток.
В целом впечатление от работы контроллера очень положительное. Продукт качественный. Надо отметить быстрые и четкие ответы от разработчика. Это большой плюс.
Рекомендую этот контроллер для использования. 😃
