
Открываю новую тему своего дневника - CopterControl проекта OpenPilot.
Стараниями Alkonaft43 я заполучил эту систему с твердым наказом приделать её на вертолет и настроить как следует. После знакомства с документацией и ПО модуль был установлен на тестовый клон 450-го класса.


Наконец-то нашел время описать мой масштабный проект “Идеальный вертолет для FPV” в деталях.

Вчера завершил сборку нового подвеса для камеры, уложил все провода, проверил настройки, зарядил все батареи. Получилось очень аккуратно и красиво. Тестовое висение в комнате показало существенное снижение вибраций камеры.
Сегодня утром бросил вертолет в багажник машины; после работы произведу проверочный полет в поле. Если все пройдет успешно, то можно считать проект завершенным. Засяду писать длинную статью про все ньюансы сборки и настройки. С фотографиями конечно. 😃
UPD. Только что вернулся с поля, с тестового полета.
Получилась полная фигня, новая версия подвеса просто никакая, камеру бросает из стороны в сторону на километр. 😦
Буду все переделывать, есть еще пара идей. Так что никакого описания пока выкладывать не буду.
Вчера состоялся второй успешный полет по камере. В текущей конфигурации вертолет очень хорошо и предсказуемо управляется даже в приличный ветер. При снижении почти всегда возникает флаттер на лопастях, на экране видно сильную тряску. Взлетный вес с батареей 4400 4S получился 1427 грам, что для 450-го класса очень много. Но динамика очень даже приличная, а на 10+ минут полетного времени тратится 3000 мАч. Времени более чем достаточно, чтобы получить свою дозу адреналина.
Вот запись с камеры на борту:
Сегодня потратит 12 часов на финальную сборку своего вертолета для FPV. И все равно он пока не готов… 😵
Но электроника вся подключена и проверена, все работает. Для камеры сделал новый подвес, буду экспериментировать с жесткостью амортизаторов количеством поролона. Вибрации терпеть не собираюсь… 😃
Вот какой “Франкенштейн” получился:
Полетал вчера и сегодня на природе с камерой. Закутал её в поролон, поднят обороты на роторе. Пока значительного уменьшения вибрации не заметил, увы. Буду думать об изменении механики подвеса.
Вот пара сюжетов, остальное попозже выложу.
Напоминаю, что я строю идеальный вертолет для FPV на базе 450-го класса.
Сегодня после работы поехал в поле попробовать новую конфигурацию с камерой и батареей 4S 4400 mAh. Повесил логгер для анализа работы силовой установки.
Очень переживал, что адекватного управления при весе 1254 грамма не будет. Сомневался, что модель вообще взлетит. 😃
Тест, не смотря ни на что, можно признать успешным. Был сильный ветер, у меня был мандраж по поводу всех переделок, поэтому я не летал, а висел. Провисел шесть с половиной минут, за это время израсходовалось 1600 мА. Результат отличный, можно уверенно летать 15 минут и более.
Динамика, безусловно, пострадала. Но не катастрофически. Модель адекватна в наборе высоты, отлично противостоит порывам ветра. Резкие подрывы я пробовать не стал, боюсь, что может срезать основную шестеренку.
Вот показания логгера:
Напоминаю, что я строю идеальный вертолет для FPV на базе 450-го класса.
Решил написать небольшой анонс.
Сегодня закончил изготовление подвеса для камеры. Старался сделать нечто модульное и легкое. Помучался два дня, но вроде доволен результатом.
Основная камера у меня GoPro Hero HD, но летать по ней пока нельзя, надо ждать обновление прошивки. Есть еще обычная камера для полетов, её тоже можно ставить в изготовленный подвес.
Вот что у меня получилось (фотографировал на скорую руку, так что сорри за качество изображений):
Я достаточно лоялен к клонам, с них начинал, без них вход в хобби был бы невозможен.
А вчера из-за дешевой китайской фигни у меня чуть не случился краш модели ценой около килобакса.
Купил я недавно карбоновые лопасти для хвоста на Хоббисити. Вот такие:

Выглядят красиво.
Вчера при пируэтах начало сильно трясти хвост, а потом закрутило волчком. Щелкнул холд и чудом выровнял модель, затем очень красиво посадил на авторотации. Это была первая авторотация в реале. Спасибо симулятору и тяжеленным лопастям Radix 350 мм. С ними 450 верт авторотирует как пятисотка.
Начал новый проект - идеальный вертолет для FPV на базе 450-го клона. Для этого я буду брать только лучшие комплектующие и электронику.
Буду описывать процесс шаг за шагом.
Сегодняшний пост про шасси. Для полетов по камере важнейшим параметром является вес модели. Чем меньше вес, тем больше полезного оборудования можно навесить, тем дольше время полета. Поэтому мелочей быть не может.
Необходимы максимально легкие и прочные шасси. После недолгих поисков в сети обнаружил, что такие шасси продаются на сайте rc-carbon.com. Заказал там увеличенные шасси для 450-го класса, предварительно списавшись с владельцем сайта Сергеем. Очень отзывчивый человек, спасибо за индивидуальный подход и быстрое выполнение заказа.
Сегодня получил посылку с деталями:
Подарил жене на 8 марта инновационный смартфон от Google. К сожалению, из-за жлобства FedEx посылка пришла только сегодня, два дня валяясь на складе со статусом “Package not due for delivery”. Типа “заплатил за доставку за пять рабочих дней, вот и получи через пять дней, и нам пофигу, что она пришла на два дня раньше, будем держать на складе, но тебе не выдадим.” Ну это мелочи.
Телефон пока у меня, торжественно заряжается. Буду вручать подарок вечером. Кстати, заказывал аппарат с гравировкой, есть такая опция при заказе напрямую от Google (впрочем как и при заказе что-либо от Apple). Так что получит у меня жена именной телефон. 😃
Если жене понравится, возможно и себе возьму такой же, а то Нокия задолбала уже.
Заметил, что у меня слишком много запчастей для вертолета. Решил навести в них порядок, и у меня получился новый вертолет. 😃
Рама алюминиевая, на хвосте ремень, шасси штатные от HK-450, батарея 4S. С такими комплектующими рискованно летать не страшно. Стоимость краша минимальная.
При настройке заметил, что динамика вертолета при полетах по кривым просто бешеная. С гувернером все намного плавнее. Странно это как-то… 😃
Но я решил, что помимо тренировок новых элементов пилотажа, буду этот вертолет использовать для FPV. Комплект 1,3 ГГц у меня уже куплен, надо набраться смелости и начать летать.
А свой первый мега-навороченный пилотажный вертолет буду использовать для удовольствия, летать на нем буду только проверенные фигуры.
Поставил недавно лопасти длиной 360 мм на свой “HK-450”. Лопасти от Outrage G5, на 35 мм длиннее и на 2 мм шире стандартных от 450го.
Полетал сегодня в порывистый ветер. На поле был чувак с ветромером, намерил порывы до 8 м/с. Вертолет летал как по рельсам. Другой чувак в поле отказался летать на 500ке из-за ветра, и смотрел на меня как на сумасшедшего. Но потом долго жал руку и удивлялся как я не раздолбал вертолет. 😃
А на самом деле ничего сложного не было, действительно с этими лопастями летать стало очень просто и предсказуемо. Теперь я с них не слезу никогда.
Мой клон HK-450 восстановлен после разрушительного седьмого краша.
Помимо карбоновой рамы, площадки по гиросокоп и новых сервоприводов, вертолетик получил новый хвост с валом.
Наконец-то я получил моторчик Хайвольт. Спасибо огромное Александру за логистику. 😃
В этой теме я буду выкладывать все полученные знания об этом моторе.
Итак, бесколлекторный двигатеть серии 2312/410. Вот параметры производителя:
- диаметр статора 23мм,
- длина статора 12мм,
- Кv = 4100 об/В,
- диаметр вала 3 мм,
- рекомендуемая частота ШИМ - 12 кГц,
- рекомендуемый угол опережения (timing) - 15-20 градусов.
- Максимальный продолжительный ток - 30 А,
- Количество полюсов - 6,
- Ток холостого хода - 2.6 A,
- Сопротивление - 12.5 мОм.
Вчера я уронил вертолет и поломал лопасти и алюминиевую голову.
Весь вечер сидел и чинил, поставил пластиковую голову, все заново отстроил, проверил.
Сегодня в обед пришел на поле и с огромным удовольствием отлетал 4 пака. У меня стали получаться плавные пролеты слева направо и обратно. Стабильно висел обоими боками.
На пятом паке ничего не предвещало беды. Вдруг вертолет резко завалилися на правый бок и упал на землю. Я видел этот маневр, пытался его парировать, но вертолет совершенно не слушался. Холд я опять не успел включить вовремя, более того, включил Idle2, вместо холда, кошмар, короче.
Дефектовка показала, что вышла из строя левая серва, застыла в верхнем крайнем положении. Шансов спасти вертолет не было, т.к. что что-то замкнуло в электрической части сервы, и из-за этого все остальные сервы беспорядочно дергались.
Вчера вечером решил отработать кувырки назад и вперед с новыми настройками мотора. Полеты сразу не задались, первый пак я случайно отлетал с половинными расходами в передатчике. Два раза чудом вытащил слабоуправляемый вертолет из крутого пике. Потом сообразил в чем дело, поменял пак и стал летать дальше. Во время очередного кувырка назад дал слишком много отрицательных шагов, вертолет вначале подбросило вверх, а потом кинуло на меня. А я выруливать в ситуации, когда вертолет прямо над головой, пока не умею. Всё, что я смог - это дернуть вовремя холд. Вертолет влетел в землю по касательной, почти параллельно поверхности, но с высокой горизонтальной скоростью.
Совсем недавно я поставил особо прочный основной вал, из закаленной стали. И результате краша вал не погнулся. Но остальное все поломалось.
Я доигрался и сжёг новый моторчик Turnigy E500 6T 4000Kv
Пытался опытным путем подобрать значения частоты ШИМ и угол опережения. Поставил частоту в 25кГц, а угол опережения в 22 градуса.
При таких установках снял более 700 Вт при оборотах ротора 3000 в минуту.
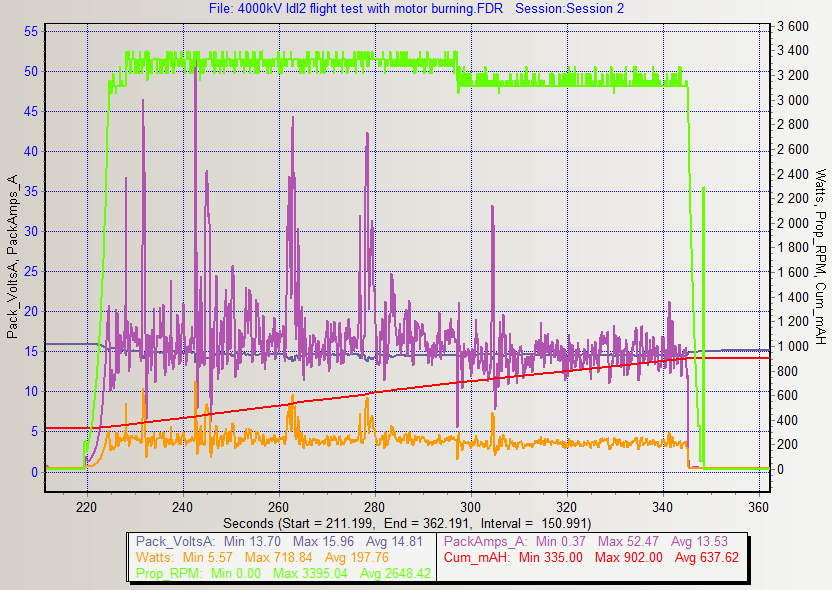
Ну а потом, при очередной раскрутке ротора, мотор сгорел. Выглядело это так:
Вчера раздолбал свой вертолетик. Начал крутить флипы в сильный порывистый ветер, зарулился и уронил птичку прямо к ногам. Обидно, что не нажал hold вовремя.
В минусе основной и промежуточные валы, основная шестеренка, лопасти, ось флайбара. Стандартный набор.
Все уже починил, поставил с оказией мотор Turnigy E500 6T 4000Kv.
Сегодня успешно поднял свой HK450 на километровую высоту над уровнем моря. Для этого мне пришлось забраться на гору высотой 994 метра. 😃
Было страшно, но очень красиво!

Вчера вечером задумался, почему же у меня обороты при аккумуляторе 3S меньше, чем при 4S. Вроде как гувернер должен их держать независимо от батареи.
А потом включил Excel, посчитал все и понял, что я глупый синий ишак. 😛
Еще бы у меня обороты не падали!
Мне надо 2800 об/мин. на роторе. Основная шестерня 150 зубьев, пиньон на двигателе - 10 зубьев.
Для того, чтобы двигатель давал 42 тыс. об/мин., необходимо напряжение 13,125 Вольт, т.к. двигатель 3200 kV. Откуда же эти вольты у 3S? Вот мне и ответ.
Поставил пиньон на 11 зубъев, теперь необходимо держать 38 тыс оборотов в минуту, это уже более реально, напряжение должно быть 11,931 Вольта. Но всё равно не совсем правильно. Закажу пиньон на 12 зубьев, тогда необходимые 35 тыс. оборотов в минуту будут уже при 10,93 Вольта, т.е. приличный запас остается.
Вот как бывает полезно думать перед сном. 😃
В Осло приехал Андрей Прикупец, легенда FPV.
Я составил компанию Андрею во время некоторых его полетов.
Вот несколько фотографий и видео:

Сегодня я наконец-то выкладываю видео как летает мой клон HK-450 на 15-и вольтах (4S LiPo). Мотор Turnigy 2836 Brushless EDF Motor 3200kv за 17 баксов. Дергать стик газа до упора вверх я пока побоялся, но и так вертолет подрывает неслабо. Теперь у меня нет технических проблем с вертолетом, все зависит только от меня. Буду тренироваться… 😃
Целью данной статьи является подробное описание полученных мною знаний при подготовке контроллера скорости Markus SL45 к эксплуатации. Я столкнулся с множеством вопросов, и уверен, что публикация ответов на них поможет новичкам, как я, сохранить время и силы. 😃
Почему Markus? Честно скажу, выбрал только потому, что при многих равных характеристиках, это российская разработка. Почитал форумы, вроде негативных отзывов нет. Еще и сына моего зовут Маркус. 😃
Для мотора Turnigy 2836 Brushless EDF Motor 3200kv, который стоит на моем вертолетике, крайне сложно найти развернутые характеристики. На китайском сайте указана максимальная мощность 650 Ватт. Даже если тут правды только наполовину, то все равно максимальный ток может достигать 35А при использовании аккумуляторов Li-Po 3S. Я выбрал номинальный ток контроллера скорости с запасом на будущее - 45А. Может когда-нибудь дорасту до 500-ки. 😃