Вчера состоялся второй успешный полет по камере. В текущей конфигурации вертолет очень хорошо и предсказуемо управляется даже в приличный ветер. При снижении почти всегда возникает флаттер на лопастях, на экране видно сильную тряску. Взлетный вес с батареей 4400 4S получился 1427 грам, что для 450-го класса очень много. Но динамика очень даже приличная, а на 10+ минут полетного времени тратится 3000 мАч. Времени более чем достаточно, чтобы получить свою дозу адреналина.
Посадка, конечно, получается пока не очень. В этот раз я порубил на кусочки какое-то многолетнее растение высотой около метра. Но потерь нет, лопасти в порядке. Самый кайф при полетах на вертолете по камере - это медленные пролеты с зависаниями на низкой и сверхнизкой высоте. Самолету такое недоступно. Но я проверил как высоко хватит у меня смелости забраться. Получилось 446 метров от поверхности и более семисот метров от базы. Видео пропало секунд на десять и я решил вернуться (вслепую, но интуитивно управляя вертолетом). 😃 Надо что-то делать с приемной антенной для видео.
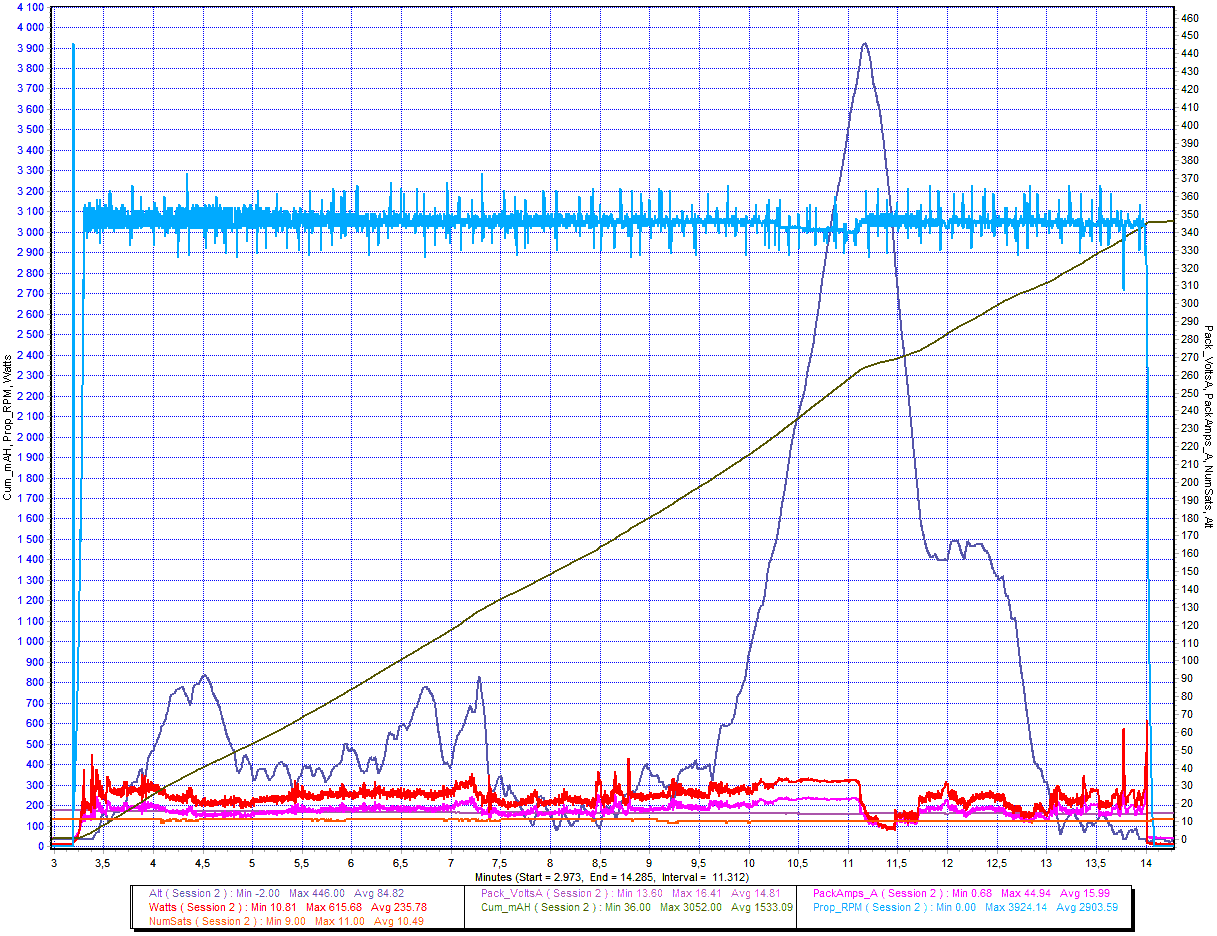
Вот телеметрия всего полета (по клику полный размер):
Видны максимальные значения высоты, расход батареи и т.д.
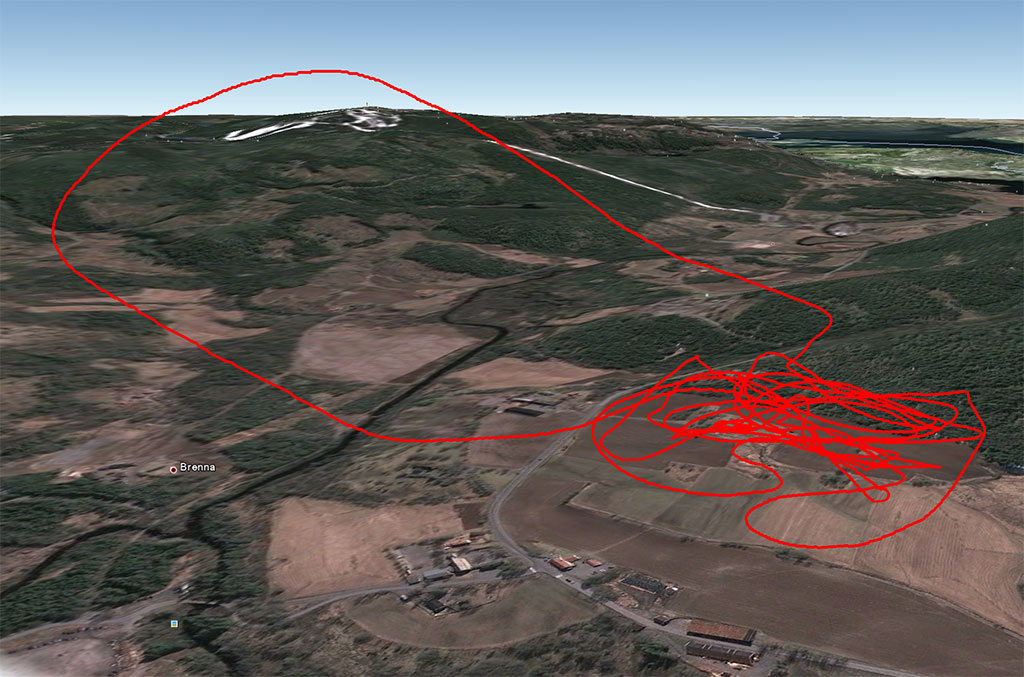
А вот как выглядел полет после загрузки GPS трека в Google Earth:
Надо что то делать с передающей антенной, посмотри куда она излучает когда он к тебе носом летит. А вообще конечно лучше так не делать, а то мы его никогда не нашли если что.
Кроме зависаний, в отличии от самолета, вертолет может лететь любым боком вперед, а еще и спиной.
Хорошо получается, тоже загорелся желанием создать на базе 450 такую ВЕСЧЬ!)
Кроме зависаний, в отличии от самолета, вертолет может лететь любым боком вперед, а еще и спиной.
Хорошо получается, тоже загорелся желанием создать на базе 450 такую ВЕСЧЬ!)
Спиной летать можно, но очень аккуратно, т.к. можно влететь куда-нить, а еще при таком полете задирается нос и ориентироваться сложнее, т.к. большую часть экрана занимает небо.
Я скоро, после некоторых мелких доработок, напишу большую статью про конфигурацию, типа что и как сделано и настроено. Финальный аккорд, так сказать. 😃
было бы хорошо, потому, как заинтересовало очень и есть свободная тушка, как раз можно под ФПВ загрузить ее
Максим, подскажи комплектацию по видеотракту, которую юзаешь… или ссыль - где писал если…
ааа, все нашел, вопрос исчерпан…
Спиной летать можно, но очень аккуратно, т.к. можно влететь куда-нить, а еще при таком полете задирается нос и ориентироваться сложнее, т.к. большую часть экрана занимает небо.
Я скоро, после некоторых мелких доработок, напишу большую статью про конфигурацию, типа что и как сделано и настроено. Финальный аккорд, так сказать. 😃
Для подобных маневров надо нормальный управляемый подвес камеры двухосевой(или одноосевой с тилтом ибо у верта опускание и поднятие носа нужно для движения вперед-назад и будет всегда), камера в носу самом и сделать микс подмешивая Elevator к каналу тилта. Сделать их в противофазе - тянем на себя(нос задирается) - камера опускается вниз, тянем от себя - камера идет вверх. Это конечно упрощенно и не гироскоп, но действенно. гирик на тилт будет лучше но дорого.
Для подобных маневров надо нормальный управляемый подвес камеры двухосевой(или одноосевой с тилтом ибо у верта опускание и поднятие носа нужно для движения вперед-назад и будет всегда), камера в носу самом и сделать микс подмешивая Elevator к каналу тилта. Сделать их в противофазе - тянем на себя(нос задирается) - камера опускается вниз, тянем от себя - камера идет вверх. Это конечно упрощенно и не гироскоп, но действенно. гирик на тилт будет лучше но дорого.
Миксы не подойдут, так как в вертолете нет линейной зависимости между танагажом и каналом управления.
Гиростабилизированный подвес для FPV подходит плохо, теряется обратная связь по положению фюзеляжа. Надо делать или какую-то индикацию кренов корпуса относительно камеры, или вводить в кадр неподвижный элемент корпуса и по нему ориентироваться. Первый вариант сложен технически, второй - портит картинку.
Так что буду искать компромисный вариант.
…
Гиростабилизированный подвес для FPV подходит плохо, теряется обратная связь по положению фюзеляжа. Надо делать или какую-то индикацию кренов корпуса относительно камеры, или вводить в кадр неподвижный элемент корпуса и по нему ориентироваться. Первый вариант сложен технически, второй - портит картинку.
Так что буду искать компромисный вариант.
Тренировки - и все получится… Будешь ориентироваться по горизонту-земле.
На большой высоте - небольшой крен-тангаж-потеря высоты - не смертельно. На малой высоте - уже отклонения лучше видно…
Так что влетаешься…
Тренировки - и все получится… Будешь ориентироваться по горизонту-земле.
На большой высоте - небольшой крен-тангаж-потеря высоты - не смертельно. На малой высоте - уже отклонения лучше видно…
Так что влетаешься…
В том то и дело, что по земле ориентироваться будет нельзя, так как камера будет всегда параллельна земле, в этом и фишка подвеса. Мне важно контролировать положение вертолета, а если обратной связи нет, то очень высока вероятность уронить вертолет, особенно на низких высотах. А именно на них и проявляются все преимущества вертолета.
В том то и дело, что по земле ориентироваться будет нельзя, так как камера будет всегда параллельна земле, в этом и фишка подвеса. Мне важно контролировать положение вертолета, а если обратной связи нет, то очень высока вероятность уронить вертолет, особенно на низких высотах. А именно на них и проявляются все преимущества вертолета.
Дык я не про подвес. Именно - камера закреплена на вертолете “жестко” относительно корпуса. И тогда уже с тренировками будешь определять и крен и тангаж… и высоту косвенно…
P.S. Мы вот в летном училище - 1-й курс практически весь учили теорию и во втором семестре уже начали летать на ТРЕНАЖЕРЕ (симулятор по буржуйски). На тренажере - естественно все по приборам, и взлет и посадка. Тренажер старый был, да и самолеты учебные то же старые - Л-29 (чешская сборка).
Потом, в конце первого курса поехали на летную практику (в августе, в Азербайджан - ужос, жарища страшная).
Вот и инструктора сразу говорят - все что научились на тренажере - забудьте!!! Все будет не так, все будет подругому.
И начались реальные полеты… Долго инструктор не мог выбить из меня (и других то же) привычки смотреть “в кабину” на АГД (авиагоризонт)!!! Так и твердил из задней кабины: " Смотри за кабину!!! Смотри за кабину!!!"
Хотя приборы надо контроллировать - скорость, высота и много чего еще.
Потом уже научились конечно…
Да и на предпосадочном снижении - всегда смотришь вперед, на полосу… и перед посадкой уже именно по земле определяешь (смотришь чуть влево и вперед) приближение самолета к земле и момент касания полосы колесами…
Но долго вырабатывается это умение - только летать-летать и летать…
😃
Все верно, я сейчас так и летаю, или стараюсь так летать. 😃
Просто выше шла речь о борьбе с вибрациями, о гиростабилизированном подвесе, который компенсирует крены и вибрации. С ним картинка получается ровная, “профессиональная”. Но летать по этой картинке невозможно, т.к. положение модели не чувствуется. В идеале должены быть две камеры, для оператора и для пилота. Но это нереально на 450-ом классе.
Поэтому я склоняюсь к подвесу с мягким пассивным депфированием по крену и тангажу. Это сгладит вибрации, но при этом камера будет всегда возвращаться в центральное положение, хоть и с задержкой. Вот такой компромис. 😃
На крайнем видео - честно говоря вибрации не напрягают.
Но это меня - зрителя.
Именно в роли пилота - они может и по другому воспринимаются…
😃
На крайнем видео - честно говоря вибрации не напрягают.
Но это меня - зрителя.
Именно в роли пилота - они может и по другому воспринимаются…
😃
Ну пилоту они вообще пофигу, их не видно. Проявляются они при просмотре записи с флешки камеры в режиме Full HD. Но я буду добиваться более качественного видео. 😃
Но летать по этой картинке невозможно, т.к. положение модели не чувствуется.
датчики от СoPilot + OSD Pro — можно вывести некое подобие авиагоризонта прямо на экран, не думали над таким вариантом?
датчики от СoPilot + OSD Pro — можно вывести некое подобие авиагоризонта прямо на экран, не думали над таким вариантом?
Ну мне как бы дополнительно выводить положение горизонта и не надо совсем. Я горизонт вижу в камеру. Проблема в отображении степени отклонения гиростабилизированного подвеса относительно корпуса вертолета, чтобы несмотря на стабилизацию подвеса, понимать, как расположен вертолет в пространстве.
датчики от СoPilot + OSD Pro
Так на сколько я понимаю на датчиках будет информация о вертолёте а не о камере, что для вас и нужно. А на флешку оно будет писаться без этих данных. Я думал сделать так (когда у меня будет на чём летать).
Так на сколько я понимаю на датчиках будет информация о вертолёте а не о камере, что для вас и нужно. А на флешку оно будет писаться без этих данных. Я думал сделать так (когда у меня будет на чём летать).
Верно, только информация о положении будет инвертирована относительно вертикальной оси. Т.е. наклонился датчик горизонта вместе с вертолетом вправо, линия горизонта на экране будет поворачиваться против часовой стрелки. Если подвес обеспечивает постоянство положения камеры относительно горизонта, то индикатор горизонта будет инвентированно показывать положение корпуса вертолета. Наверняка есть возможность поиграться настройками ОСД, так что идея отличная.
Обалденное видео!
У меня нет слов. Работа проделана потрясающая!
Спасибо!
Макс, дай пожалуйста фото, как все расположено и ОЧЕНЬ желательно, дай видео железо которое стоит и как стоит. чтоб небыло помех.
какя камера с какой линзой? (как вел запись?)
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"41fd41123df9550077792514":{"_id":"41fd41123df9550077792514","hid":5875,"name":"NailMan","nick":"NailMan","avatar_id":null,"css":""},"47d278403df955007777cf76":{"_id":"47d278403df955007777cf76","hid":32309,"name":"crafter","nick":"crafter","avatar_id":null,"css":""},"4826ee483df955007777b0e0":{"_id":"4826ee483df955007777b0e0","hid":34364,"name":"HikeR","nick":"HikeR","avatar_id":null,"css":""},"493ec13c3df9550077774acf":{"_id":"493ec13c3df9550077774acf","hid":41649,"name":"Oleg_fly","nick":"Oleg_fly","avatar_id":null,"css":""},"49c50dd23df9550077770492":{"_id":"49c50dd23df9550077770492","hid":45716,"name":"Maximus43","nick":"Maximus43","avatar_id":null,"css":""},"49ee64553df955007776ef40":{"_id":"49ee64553df955007776ef40","hid":47203,"name":"AlcoNaft43","nick":"AlcoNaft43","avatar_id":null,"css":""},"49febef83df955007776e8c6":{"_id":"49febef83df955007776e8c6","hid":47703,"name":"Polski","nick":"Polski","avatar_id":null,"css":"user__m-banned"},"4c83ccb13df955007775ccb2":{"_id":"4c83ccb13df955007775ccb2","hid":71405,"name":"Sash_None","nick":"Sash_None","avatar_id":null,"css":""},"4d89f4703df95500777547a7":{"_id":"4d89f4703df95500777547a7","hid":84090,"name":"Саша_пилот","nick":"Саша_пилот","avatar_id":null,"css":"user__m-banned"}},"settings":{"blogs_can_create":false,"blogs_mod_can_delete":false,"blogs_mod_can_hard_delete":false,"blogs_mod_can_add_infractions":false,"can_report_abuse":false,"can_vote":false,"can_see_ip":false,"blogs_edit_comments_max_time":30,"blogs_show_ignored":false,"blogs_reply_old_comment_threshold":30,"votes_add_max_time":168},"entry":{"_id":"4c39953b99707300770feb26","hid":9564,"title":"Идеальный вертолет для FPV. Полет по камере!","html":"<p>Вчера состоялся второй успешный полет по камере. В текущей конфигурации вертолет очень хорошо и предсказуемо управляется даже в приличный ветер. При снижении почти всегда возникает флаттер на лопастях, на экране видно сильную тряску. Взлетный вес с батареей 4400 4S получился 1427 грам, что для 450-го класса очень много. Но динамика очень даже приличная, а на 10+ минут полетного времени тратится 3000 мАч. Времени более чем достаточно, чтобы получить свою дозу адреналина.</p>\n<p>Вот запись с камеры на борту:</p>\n<div class=\"ez-player ez-domain-youtube_com ez-block\" data-placeholder=\"<iframe class="ez-player-frame" src="https://www.youtube.com/embed/Ftuwu_76w9o?feature=oembed&amp;autoplay=1" allowfullscreen></iframe>\" data-nd-link-orig=\"http://www.youtube.com/watch?v=Ftuwu_76w9o\" data-nd-link-type=\"linkify\">\n <div class=\"ez-player-container\" style=\"padding-bottom: 56.5%;\">\n <a class=\"ez-player-placeholder\" target=\"_blank\" href=\"http://www.youtube.com/watch?v=Ftuwu_76w9o\" rel=\"nofollow\">\n <div class=\"ez-player-picture\" style=\"background-image: url('https://i.ytimg.com/vi/Ftuwu_76w9o/hqdefault.jpg');\"></div>\n \n <div class=\"ez-player-header\">\n <div class=\"ez-player-title\">\n My second FPV flight on HK450 heli\n </div>\n </div>\n \n <div class=\"ez-player-button\"></div>\n <div class=\"ez-player-logo\"></div>\n \n </a>\n </div>\n</div>\n<!--cut-->\n<p>Посадка, конечно, получается пока не очень. В этот раз я порубил на кусочки какое-то многолетнее растение высотой около метра. Но потерь нет, лопасти в порядке. Самый кайф при полетах на вертолете по камере - это медленные пролеты с зависаниями на низкой и сверхнизкой высоте. Самолету такое недоступно. Но я проверил как высоко хватит у меня смелости забраться. Получилось 446 метров от поверхности и более семисот метров от базы. Видео пропало секунд на десять и я решил вернуться (вслепую, но интуитивно управляя вертолетом). <span class=\"emoji emoji-smiley\" data-nd-emoji-src=\":smiley:\">😃</span> Надо что-то делать с приемной антенной для видео.</p>\n<p>Вот телеметрия всего полета (по клику полный размер):</p>\n<p><a href=\"https://izergin.ru/rc/fpv_tele.png\" class=\"link link-ext\" data-nd-link-orig=\"https://izergin.ru/rc/fpv_tele.png\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 1217px\" data-nd-image-orig=\"https://izergin.ru/rc/fpv_tele.png\"><img src=\"https://izergin.ru/rc/fpv_tele.png\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 76.9104%\"></span></span></a><br>\nВидны максимальные значения высоты, расход батареи и т.д.</p>\n<p>А вот как выглядел полет после загрузки GPS трека в Google Earth:</p>\n<p><a href=\"https://izergin.ru/rc/fpv_gg_maps.jpg\" class=\"link link-ext\" data-nd-link-orig=\"https://izergin.ru/rc/fpv_gg_maps.jpg\" target=\"_blank\" rel=\"nofollow noopener\"><span class=\"image\" style=\"width: 1024px\" data-nd-image-orig=\"https://izergin.ru/rc/fpv_gg_maps.jpg\"><img src=\"https://izergin.ru/rc/fpv_gg_maps.jpg\" alt referrerpolicy=\"no-referrer\"><span class=\"image__spacer\" style=\"padding-bottom: 66.1133%\"></span></span></a></p>\n","user":"49c50dd23df9550077770492","ts":"2010-07-11T09:56:11.000Z","st":1,"cache":{"comment_count":21,"last_comment":"4eef22339970730077174070","last_comment_hid":21,"last_ts":"2011-12-19T11:38:27.000Z","last_user":"49c50dd23df9550077770492"},"views":6810,"bookmarks":0,"votes":0},"subscription":null},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}