Трикоптер.

Про прошивку читал, но пока ссыкатно как-то в передатчик лезть
Все равно вам скоро придетстя туда лезть - паять резистор 5 кОм и резать дорожку (чтобы безгеморно подключать симуляторы), ставить подсветку экрана и батарейку или изменять mode1 на mode2…
А по поводу перепрошивки - я тоже долго не решался - но теперь вижу что делается все довольно просто и новые возможности софта аппы - впечатляют 😃 На второй своей Turnigy тоже перешью и комплект FrSky ее уже дожидается (она у меня для коптеров будет) 😃. Плюс у меня есть планы дополнительно вставить в нее 4-х канальный передатчик Spectrum для мелких вертолетов (на форуме это тоже было).
Только нужен паяльник на 20-25 Вт с тонким жалом и жидкий нейтральный флюс типа ЛТИ-120. Ну и аккуратность и внимательность.
Хотя… и со стандартной прошивкой Turnigy 9x тоже можно вполне спокойно летать.
Для обычной прошивке Turnigy 9x вроде также?
Указал, т.к. в прошивке er9x на первые каналы вертолетного шаблона по умолчанию вешаются CYC1, CYC2 и т.д.
Пропеллеры еще не балансировал
Лучше всего балансировать на магнитном балансире (советую не покупать, а сделать такой самому, как упоминалось выше).
Я пока не заморачивался с изолентой и скоблением пластика лопастей сверху/снизу/сбоку (для сохранения геометрии лопасти) - просто тупо отрезал ножницами по чуть-чуть с конца лопасти (оставляя кромку чуть скругленной в плане) до равновесия. На самой лучшей лопасти из 4-х - ничего не отрезал, на самой худшей отрезано около 8 мм.
А я раму нормальную сделал наконец.
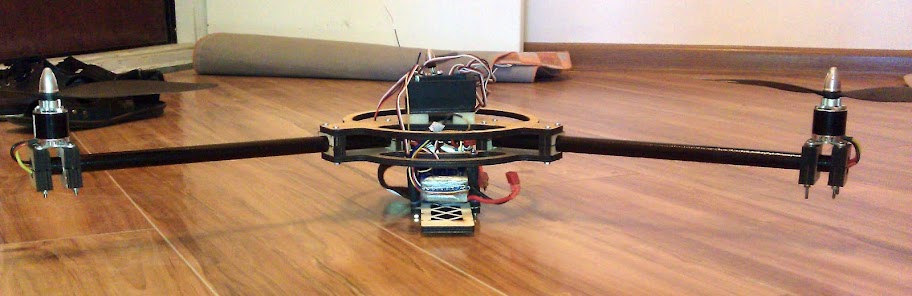


Шасси так и не придумал нормальное, поэтому батарейный отсек им и является пока что.
Вес с батареей 4S 5А 1380гр.
И наверное нужно лучи укорачивать, говорят стабильнее летает…
Имхо тяжеловат 480г на ось… а захочется камеру с видео передатчикм поставить…
Сколько сейчас полетное время?
У меня треха для ФПВ с камерой Gopro и передатчиком,полетный 1кг., время полета 15-16 мин.
А я раму нормальную сделал наконец
Андрей!
Посмотри в этой Теме где-то мое сообщение, где я выкладывал хорошую раму для резки из текстолита… На свой трикоптер 5-й версии. Теперь эта рама стоит на моем Y-6 и уже пережила без ремонтов два падения:
- первое с высоты 15-17 метров на землю (на бок)
- второе с 6-7 метров на асфальт (головой вниз)
В обоих случаях на аппарате стоял полный “фарш” оборудования включая Sony NEX 5N с подвесом. Полетный вес - почти 2,5 кг. Абсолютно вся электроника и камера целы. В последнем крэше пострадал один мотор - немного погнулся сердечник статора…
Вес с батареей 4S 5А 1380гр.
Движки 70 грамм? Если да, то вес вполне нормальный с АКБ 4S 5А. По крайней мере методов “похудения” я лично не вижу.
Отлично смотрится треха! Укорачивать лучи не стОит.
Ноги можно сделать например так, как на моем:
У меня трешка в полном комплекте с 50 граммовыми движками, винтами 12х4,5, ГоПро, видеопередатчиком, телеметрией и АКБ зиппи компакт 2200 3S 25С (164 грамма) весит 920 грамм.
Время полета пока не замерял на этих винтах. На винтах 10х4,5 летал 12 минут.
А желе нет при такой установке?
С таким весом (1380) вылетывал 18 минут блинчиком. Если загрузить ФПВ и камерой прохойой (без подвесов) получаю 1570гр. 523гр на ось. С таким весом летает, но вяло.
Стеклотекстолитовая рама это хорошо, наверняка можно сэкономить на весе чуток, но мне из фанеры проще. Хотя бы потому что ее проще достать в РБ и проще порезать лазером.
Да, движки типоразмера 2830 = 70гр. с винтами 11-4,7 80гр-> 240гр , трубки по 23гр-> 69гр, контроллеры с проводами 150гр (тяжеловаты провода) , ВСЕ деревяшки 175гр. = 634 + батарея 465 = 1100
Остаольсь 280 неучтенных грамм.
50 гр. все болты. + моск вроде 50 гр. + приемник 15гр. + провода сигнальные 15гр. + подвес батареи(амортизаторы резиновые 4 шт) 20 гр. + поворотка хвоста (все в сборе) 30гр. = 180
Вот блин, еще где-то 100 неучтенных грамм завалялось. можно списать на погрешность при измерениях. (весы реально врут на + пару грамм. а взвешивая все по отдельности набегает…)
Мысли в слух, -где тут можно сэкономить в весе? Наверное заменив дерево текстолитом. Можно еще провода силовые сменить на полегче + контролеры вынести к движкам избавившись от 3го провода. . Грамм 100 наверное можно скинуть. Еще можно физически размер уменьшить, сейчас по лучам радиус 380мм, а диаметр рамы 200мм…
Но в общем-то все это не важно, т.к. этот коптер планировался в дальнейшем под соосную гексу. А сейчас треха, что бы рефлексы наработать.
А на счет ног, платформа аккума сейчас выполняет оличную роль шасси!
На счет желе еще не знаю, с камерой в таком варианте не летал. На прохе в режиме r3 его точно не будет, а вот в режиме r5 нужно будет проверить.
Хотя бы потому что ее проще достать в РБ и проще порезать лазером.
На жданах текстолит 1.5 - односторонний (последний раз брал 300Х400 мм) -легко фольга отходит - проверено 😃
Спасибо, до ждаников не доехал, просто целью не задавался. А фанэра кругом. Ну и фрезер останется найти…
ЗЫ. Точнее дело было так, товарищь у которого лазером режу, сказал что текстолит его лазер (150Вт) не берет, смолу выжигает а нити остаются, поэтому про текстолит и думать перестал.
Тут у меня еще кусочек 1,5мм фольгированного с двух сторон текстолита валяется. Взвесил, 55гр. Кусок фанэры 6мм такого же размера 57… Фанэра по жесткости явно лидирует…
Так что я в замешательстве…
А лобзиком ручным слабо rcopen.com/files/5044d0739970730077b2edf2 😃 первая рама была более вычурная, но к сожалению сломал, а с этой спешил, да и разводка питания у меня на нижней части…
Делаю по ЛУТ -как и платы, потом выпиливаю…
Не, лобзиком в наш век это не по фэншую. Простую рамку как у вас конечно можно, но вот ажурненькую, с кучей дырочек для облегчения, с лапками для навески… Ну его, я лучше фрезер найду, а вообще свой нужно делать…
А желе нет при такой установке?
Если это мне вопрос, то при такой установке желе присутствует на г5. Пол дня убил на балансировку винтов 12х4,5 прямо на движках, но по отдельности каждый винт практически не дает вибраций, а все вместе - вибрация ощущается на видео. В других режимах не пробовал пока. На 10х4,5 такого гемора не было.
Только что отлетал один акум, время с 12х4,5 и 2200 получилось ровно 13 минут, на 10х4,5 получалось 12 минут. Кроме того сегодня ветрено, по курсу с 12" удерживается сложнее и чувствительность на ветер увеличилась. С 10" было лучше и в более сильный ветер.
Вернусь обратно на 10"
Лучше конечно делать виброразвязку, я винты вообще балансирую за пять минут.
Добрый вечер, полностью собрал трикоптер с rcexplorer, но винта прикручивать боюсь - опыта пилотирования совсем нет, да и вдруг чего не так настроил - сразу в стенку улетит и хана 😦 Так что хочу попросить разъяснить некоторые моменты настройки трикоптера совместно с аппой Turnigy 9x(mode 2).
Поправьте, если что не так делаю, по порядку:
- Запрограммировал регуляторы.
- Подключил серву к приемнику, что бы она заняла положение соответствующие 0.
- Прошил мозги HK 3.0 прошивкой KKmulticopter_v1.6.
- Затем, как я понял, нужно откалибровать мозки, делал как тут написано: rcopen.com/forum/f123/topic229200/3
- Проверял настройки платы - пробовал наклонять, вращать “взведенный” трикоптер - вроде, пытается компенсировать вращения как надо. Т.е. накляняю вправо правый двигатель крутит сильнее и т.д.
- Далее нужно насторить аппу. Аппа у меня mode 2.
Выбрал режим HELI 3-1, а вот с кривыми что-то не догнал… 😦
Какие параметры нужно вводить для кривых газа и шага и что еще нужно настроить в передатчике?
Советуют самолетную настройку…
Подключил серву к приемнику, что бы она заняла положение соответствующие 0
Можно и к плате контролера, если по рекомендации из этого поста (при подаче питания он сразу ставит серву в “ноль”).
нужно откалибровать мозки, делал как тут написано: Мультироторные системы на основе платы КК контроллера от kkmulticopter.kr
Не скажу точно, но очень похоже на то, что нужно - я еще сам не разобрался.
Далее нужно насторить аппу. Аппа у меня mode 2. Выбрал режим HELI 3-1, а вот с кривыми что-то не догнал.
Если выбираете вертолетную модель, то нужно в Turnigy 9x выбирать HELI 1 (как для ФБЛ вертолета или вертолетного симулятора).
Т.к. я пришел на коптеры из вертолетов, то я так и сделал, но возможно, будет действительно целесообразнее выбрать самолетную модель, тут уж пусть более опытные товарищи подскажут.
Кривую газа сначала делаем линейной (0-25-50-75-100) и придерживая коптер за середину сверху (чтобы не взлетел, если что-нибудь накосячили), разблокируем движки и потихоньку добавляем газ. Замечаем, когда коптер начнет отрываться от земли и сколько процентов газа при этом дано (на глаз).
Отключаем коптер и кривую газа настраиваем так, чтобы получить пологую площадку на уровне найденного газа при висении (это поможет нам легче удерживать коптер по высоте).
Т.е., если коптер начал взлетать примерно на 45 %, то кривую газа делаем, например, такой 0-40-50-65-100. По мере разрядки акка, коптер, скорее всего будет зависать уже при более высоких значениях газа, поэтому площадку делаем с учетом данного факта.
Также перед первыми полетами рекомендую сделать экспоненты по RUDD, ELEV, AILE по 25…30, это также повысит точность управления (причем я вешаю эту экспоненту сразу на положение OFF переключателей).
Если у вас на аппе прошивка er9x, то кривые RUDD, ELEV, AILE также настраиваем в виде -100…-50…0…50…100 (в стандартной прошивке они не настраиваются).
Пробуем потихоньку взлетать (зависать над полом) - если сразу сильно куда-нибудь тянет, то снова пробуем калибровать регули через плату, и устанавливать “ноль” стиков (см. ваш п.4)
И не забудьте перед первыми взлетами тщательно отбалансировать движки и пропы - многие контролеры плохо переносят вибрацию.
И если у вас есть файлсейф - тоже настройте его так, чтобы коптер не слишком быстро снижался при потере радиосигнала…
Кривую газа сначала делаем линейной (0-25-50-75-100) и придерживая коптер за середину сверху (чтобы не взлетел, если что-нибудь накосячили), разблокируем движки и потихоньку добавляем газ. Замечаем, когда коптер начнет отрываться от земли и сколько процентов газа при этом дано (на глаз).
Отключаем коптер и кривую газа настраиваем так, чтобы получить пологую площадку на уровне найденного газа при висении (это поможет нам легче удерживать коптер по высоте).
Спасибо, с кривой газа разобрался, с экспонентами тоже, а что делать с “Pitch curve”? Оставить как есть?
В общем попытался взлететь, в итоге два сломанных пропеллера. 😦 Коптер резко перевернулся вверх тормашками через правый борт. 😦
Поменял винты решил придерживать его рукой:
При взлете левый винт крутится сильнее, потом резко раскручивается правый, да так, что аж из руки вырывается! Такое впечатление, что регуляторы не успевают, программировал их с такими же параметрами как и на rcexplorer (там timing стоял в medium). В чем может быть проблема? Может регулятор перегрел какой когда перепаивал провода или бракованный попался?
У вас реверс.
В общем попытался взлететь, в итоге два сломанных пропеллера. Коптер резко перевернулся вверх тормашками через правый борт.
Моторы включаются почти одновременно. Если запустить на средний газ моторы и крепко держа коптер над головой, попытаться его наклонить/повернуть, - то все отрабатывается адекватно
Алексей, извините - видимо это моя вина - я не указал, что когда проверяете адекватность поведения коптера, крепко держа его над головой (чтобы не травмироваться, если вдруг отлетит лопасть), нужно также проверять его реакцию на движения всех стиков на аппе.
При проверке следим, чтобы рядом не было посторонних - во избежание случайных травм.
Я бы еще посоветовал одеть защитные очки (есть в любом строительном магазине)… И это - не паранойя! 😃 Отлетевшая лопасть будет опасна для окружающих в радиусе до 5 м.
Для этого можно переключиться в режим idle1 (если там у вас кривая газа настроена линейно 0-25-50-75-100).
Далее медленно двигаем газ от нуля до максимума, - коптер должно тянуть только вверх, движки должны стартовать почти одновременно, коптер не должно заваливать вперед-назад и в наклонять стороны - если что-нибудь не так, то калибруем регуляторы (все вместе) через КК (не от приемника!).
Проверяем управление по курсу - качаем левый джойстик вправо-влево на среднем (или немного меньше) газу - соответственно коптер и серва должны отрабатывать адекватно (по направлению и усилию).
При отклонениях правого джойстика (в mode2) коптер должен также наклоняться в ту же сторону, куда отклонен стик и с усилием, соответствующим величине отклонения стика.
Если что-то не так, то разбираемся с причиной неадекватного поведения - проверяем:
- правильность выставления реверса по RUDD, ELEV, AILE в аппе;
- порядок подключения проводов от приемника к КК;
- порядок подключения моторов;
- направление вращения винтов для контролера и соответствующей прошивки (если прошивались);
- направление вращения моторов;
- той ли сторойной посадили винты - я как-то поставил винт в перевернутом положении 😃
- ориентацию платы контролера на коптере;
и т.д.
Если все нормально - выбираем открытую незагроможденную площадку (желательно с мягким покрытием - газон, стадион) и пробуем потихоньку взлетать.
И не забудьте перед взлетом откалибровать горизонт для платы контролера (по крайне мере для платы FF это делается специальным движением стиков), поставив коптер на ровную горизонтальную площадку.
что делать с “Pitch curve”? Оставить как есть?
Да, это кривая - для винтов с переменным шагом - для нас - не важно, как она будет выглядеть.
Кстати, если коптер будет трудно удержать по высоте (зависнуть), можно попробовать сделать участок кривой газа в точке висения более пологим, но сделать три таких кривых и повесить их на полетные режимы norm, idle1, idle 2 (на аппе) сместив пологую площадку (для точки висения) на каждой последующей кривой на 5-10 % вверх.
Например, norm - 0-40-45-50-100; idle1 - 0-45-50-55-100; idle2 - 0-50-55-65-100.
Или - вариант с нелинейной площадкой газа: norm - 0-40-45-55-100; idle1 - 0-48-53-63-100; idle2 - 0-55-60-70-100.
Тогда по мере разрядки акка, как только стик газа будет находиться немного выше середины при висении, можно будет последовательно переключаться на режим, где будет более удобная кривая газа.
У вас реверс.
Андрей, можно поподробней, нужно какой-то канал на аппе инвертировать?
Алексей, извините - видимо это моя вина - я не указал, что когда проверяете адекватность поведения коптера, крепко держа его над головой (чтобы не травмироваться, если вдруг отлетит лопасть), нужно также проверять его реакцию на движения всех стиков на аппе.
Просто я реакцию проверял вообще без винтов.
Если что-то не так, то разбираемся с причиной неадекватного поведения - проверяем:
- правильность выставления реверса по RUDD, ELEV, AILE в аппе;
- порядок подключения проводов от приемника к КК;
- порядок подключения моторов;
- направление вращения винтов для контролера и соответствующей прошивки (если прошивались);
- направление вращения моторов;
- той ли сторойной посадили винты - я как-то поставил винт в перевернутом положении
- ориентацию платы контролера на коптере;
и т.д.
Да вроде все верно подключено - проверю еще раз, конечно, не уверен только в правильности настройки инверсии каналов. Регуляторы перед испытаниями запрограммировал с подключенным контроллером.
Про кривые - учту, когда летать начну 😉