Трикоптер.

народ кому не лень, выкладывайте сюда таблицы настроек
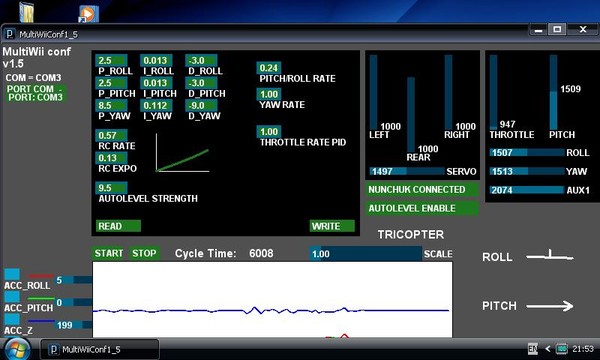
трикоптер, лучи 45см, несколько вялый но оч. устойчивый
Если не трудно, объясните как запускать программу? Скачал а он жалуется.
Кашляет? 😃)
Скачай и установи Java java.com/ru/download/windows_xpi.jsp?locale=ru&hos…
мои настройкиЮ немножко подколбашивает на ветру, но летать можно.
завтра попробую по описанному выше методу
Нам на лекциях по ТАУ объяснили ПИД-регулятор так: Управляющее воздействие (которое будет удерживать коптер в желаемом положении) U зависит от ошибки delta (ошибка = разница между желаемым состоянием и текущим. Например, коптер наклонен на -45 градусов, мы желаем 0, значит, delta = 0 - -45 = + 45 ).
П - пропорциональная составляющая: Up = p * delta, где р - ваш коэффициент. Если “р” слишком большое, возникнет перерегулирование, автоколебания и разрушение объекта (на небольшое отклонение коптер отреагирует резким броском и кувыркнется вниз).
И - интегральная составляющая. Ui = интеграл delta * i. В каждый момент времени вычисляется delta, полученные дельты складываются. Со временем получается значительная величина, если не установить объект в заданное положение (при этом растет и управляющее воздействие). Благодаря И-составляющей устраняется статическая ошибка (если работает только П-регулирование, то всегда требуется наличие ошибки для управления коптером: если вдруг delta =0 , то Up=0, объект неуправляем). Регулятор ПИ может обойтись без Д.
Д - дифференциальная составляющая. Ud = скорость изменения delta * d. Чем быстрее меняется ошибка delta, тем сильнее управляющее воздействие Ud. Ветер резко наклонил коптер, управляющее воздействие Ud резко возросло и вернуло коптер в горизонт. Коэффициент d задаете сами.
Итоговое управляющее воздействие: U = Up+Ui+Ud, которое должно вернуть коптер в желаемое положение.
А теперь интересная задачка: какие коэффициенты брать =)
Несколько месяцев назад встретил на форуме ссылку на очень простую OSD (без GPS) , кажется отображает только ток и напряжение АКБ, может что то еще , не помню, ценник был всего около 10$, ссылку потерял, по поиску результатов нет, может кинет кто ссылку на эту OSD, отличное дополнение для полетов по очкам всего за 10$.
Несколько месяцев назад встретил на форуме ссылку на очень простую OSD (без GPS) , кажется отображает только ток и напряжение АКБ, может что то еще , не помню, ценник был всего около 10$, ссылку потерял, по поиску результатов нет, может кинет кто ссылку на эту OSD, отличное дополнение для полетов по очкам всего за 10$.
Накладывалось только 2 напряжения.
www.cnchelicopter.com/servlet/the-1783/…/Detail
Только это раньше было за 10USD (см. www.rcgroups.com/forums/showthread.php?t=1329658#p…), теперь они извиняются перед предварительно-заказавшими за повышение цены до 23,99USD
Сегодня после работы поеду за нунчаками и мотиуном плюс, беру по две штуки того и того, по 800р.
Странные настройки при разных размерах везде винты одни и те же, вот сейчас на стадии сборки, думаю ставить винты 10х4.5 моторы tyrnigy 2830 1050kv регули 18-20 HK.
Нормально ли будет?

Для любителей трикоптеров интересно будет
Идея красивая, точнее реализация, но я почемуто противник идеи использования чахлого подшипника сервомашинки в качестве одной из двух опор мотора, если аппарат мелкий с мелкими моторками-еще куда не шло но вот с аппаратом покрупнее… 😦
Если уж зашла речь об OSD, ардиуна способна отлично передавать всю полетную телеметрию, осталось только ее чуточку проапгрейдить и научить это делать в скетче Wiiкоптера. Вот для затравочки:
www.compcar.ru/forum/showthread.php?t=6064
arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1220054359/al…
www.elenafrancesco.org/arduino/baroneosd/
может смаллтиму написать? думаю он сможет нам чем нибудь помочь
много то не надо, допустим горизонт, и напряжение для начала
Если уж зашла речь об OSD, ардиуна способна отлично передавать всю полетную телеметрию, осталось только ее чуточку проапгрейдить и научить это делать в скетче Wiiкоптера.
Ардуине банально не хватит быстродействия для одновременной отрисовки OSD и просчёта положения коптера
вы ссылочки полистайте, от нее не требуется ничего прорисовывать. от нее нам нужны данные телеметрии с датчиков, состояние батареи. сейчас же она способна вывести данные на lcd десплей.
Идея красивая, точнее реализация, но я почемуто противник идеи использования чахлого подшипника сервомашинки
Значит нужно добавить еще один подшипник, что бы уменьшить нагрузку на машинку.

сейчас же она способна вывести данные на lcd десплей.
Кстати так толком и непонял с каими дисплейчиками там всё работает окромя спаркфановских, не тли у нас чего поближе а то ждааать не люблю заказы из-за бугра
А зачем вообще нужна телеметрия 😃
Ну вижу я что жрет трикоптер 14 ампер, ну вижу что летит он со скоростью 15 км/ч… крутая опция, соседские дети говорят “уау”, бесспорно. но мне что с того? Медитировать на эти цифры? 😉
Даже если взять примотанный GPS, опять-же, ну показывает он где и на каком удалении дом - да я и сам это прекрасно знаю, я ж управляю аппаратом
Вольтаж батареи - единственное что есть полезного, и то обычная пищалка удобнее 😮
Зато из минусов - ворох лишних проводов, торчащие в разные стороны трубки Пито и пол рабочего экрана а-ля скринсейвер матрица .
это я так, не баталий ради, а просто для поддержания разговора 😈
ну судя по всему летя по очкам ещеб горизонт да высоту для ориентиру неплохоб видеть!
а скока там оно жрет мне пофик 😃
если летать внутри черного матового шара - без прибора показывающего горизонт и высоту однозначно никуда! 😉
Ну конечно телеметрия нужна только для полета по очкам 😃
С чего начался разговор? Про OSD за три копейки. Для этих целей можно и ардуину приучить, о чем я и поведал уважаемому собранию.
А вообще конечно давно есть более продвинутые решения, например очень хочу вот такую штуку CE OSD V1.2. Помоему гениально удобно, но жалуются люди на rcgroups что горит у нее сенсор напруги.
Кстати так толком и непонял с каими дисплейчиками там всё работает окромя спаркфановских, не тли у нас чего поближе а то ждааать не люблю заказы из-за бугра
Мне вообще не понятно, зачем он нужен, если удобнее в разы нетбук взять с собой в поле. А вот подружить виикоптер с блютузом для меня любо 😃
Ну дык с блютузом то его подружили, жаль яблофон не поддерживается 😦
А вот мне например плюс ко всем моим квадрошмадро да еще и вертолетам былоб удобнее брать маленький дисплейчик вместо нетбука
Все дело в программках, яблофон ведь не железно несовместим, а просто в аппстор еще никто не написал iWiiGUI 😉 для блекбери же написали.
Я кстати так и не допер, как там у человека блютуз заработал на arduino mini…
Ну похоже как раз железно! Ведь у эпла там свои хитрые отношения с блютузом 😦
но я почемуто противник идеи использования чахлого подшипника сервомашинки в качестве одной из двух опор мотора
Ну можно поставить промежуточный подш для надежности)))
Ардуине банально не хватит быстродействия для одновременной отрисовки OSD и просчёта положения коптера
Можно тогда второй Ардуино поставить будет и связать между собой) Размер не большой, за то полезность огромная будет))
А зачем вообще нужна телеметрия
Мне кажется это для поездов дальнего следования, кто повыше и подальше…
Мне вообще не понятно, зачем он нужен, если удобнее в разы нетбук взять с собой в поле. А вот подружить виикоптер с блютузом для меня любо
Мне тоже кажется что блютус и комуникатор или смарт проще и практичнее)))
Нетбук дороже, чем дисплейчик из спаркфана…
А кстати, кто всречал эту програмку для настройки по синезубу?
Я вот кстати тоже подумываю примкнуть к видеолетунам, в этой связи немного прибарахлился сегодня

LM 500mW 1.2