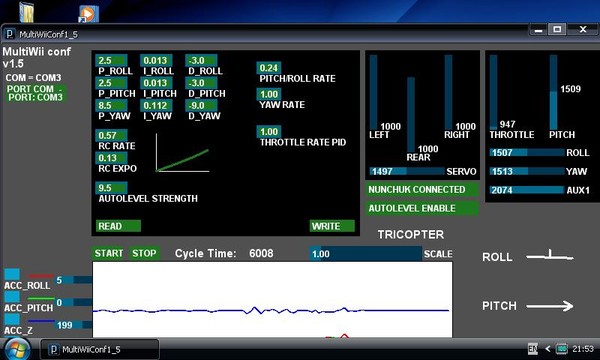
Трикоптер.

если I до нуля снизить, то обороты моторов на квадрике полностью сравняются. типа I делает необходимую разницу в оборотах. Алекс так обьяснил, когда я задал ему вопрос, почему у меня на правом переднем и левом задним обороты в GUI меньше чем на остальных.
Гляньте, что Шакира навояла по поводу того, как надо настраивать виикоптер с нуля.
www.rcgroups.com/forums/showthread.php?t=1348268
народ, гиры НК401 имею бока скошенные, т.е. на ребре оно будет стоять чуть с уклоном, это имеет сильное значение?
попробовал подключить гиру, светодиод на нем загорается, на регуле мызука играет но инициализации нет 😦
как быть?
фотки платы (не моей)
adekamer.webs.com/apps/photos/album?albumid=108054…
схема

смотрите номер детали с номиналами на схеме и на плате
конденсаторы имеют полярность - внимание!
Для тех кто мучается вопросом что куда крутить.
Представьте, вы управляете элеронами самолета. У вас в голове встроенный ПИД. Так вот, самолет летит, у вас в руках штурвал, и перед глазами только “датчик горизонта”.
Поехали.
P - это в какой ПРОПОРЦИИ (насколько сильно) вы отклоняете ручку штурвала, в ответ на ОПРЕДЕЛЕННОЕ отклонение от горизонта.
Примеры:
Значение P=100; Самолет накренен 45 градусов влево - вы располагаете штурвал в положении 45 градусов вправо.
Значение P=100; Самолет накренен 10 градусов влево - вы располагаете штурвал в положении 10 градусов вправо.
Значение P=50; Самолет накренен 45 грудусов влево - вы располагаете штурвал в положении 22.5 градусов вправо.
Значение P=50; Самолет накренен 10 грудусов влево - вы располагаете штурвал в положении 5 градусов вправо.
Если значение P слишком большое, то начнутся колебания - потому что вы будете постоянно “переруливать”
Представим, вы нашли такое значение параметра P, когда еще нет колебаний (переруливаний), и в то же время работа элеронами достаточно эффективная чтобы достойно отвечать на порывы ветра. Но…
Если появляется какая-то постоянная внешняя сила (не ветер), которая заставляет самолет удерживаться в отклоненном состоянии (например все пассажиры пересели на левую сторону ))) параметра P уже недостаточно чтобы компенсировать крен - вам уже надо как-бы подтриммировать самолет. Поэтому ввели параметр I.
I - насколько сильнее вы отклоняете ручку штурвала, если с течением времени самолет не желает возвращаться в горизонт.
Ключевое слово - “с течением времени”.
Так как I “накапливается” все время пока самолет не вернулся в горизонт, появляется некая инерционность, т.е. даже при возврате в горизонт составляющая I будет продолжать действовать постепенно уменьшаясь, что выразится во временном крене в противоположную сторону.
Ну и остается параметр D…
D - это ваш друг Вася, который стоит рядом, тоже держит руки на вашем штурвале, и не дает вам его РЕЗКО дергать, т.е. смягчает и демпфирует ваши движения. D - это сила рук вашего Васи…
Процесс настройки …
D,I в ноль.
подбираем P. Это чувствительность, самое главное. Надо найти P на пределе возникновения колебаний, и затем чуть-чуть уменьшить.
теперь начинаем увеличивать I - по вкусу, но без фанатизма - его не должно быть очень много.
ну и последним подбираем D. D тоже не должно быть много. После увеличения D можно снова попробовать увеличить P.
фотки платы (не моей)
adekamer.webs.com/apps/photos/album?albumid=108054…
схема
смотрите номер детали с номиналами на схеме и на плате
конденсаторы имеют полярность - внимание!
Платка KKmultikopter v4 кажется…
Сейчас последняя официально выложена на сайте v5.5 smd, я ее не много переделал(переразвел), сделал поменьше, поуже, ну вообщем под себя завтра постараюсь фото выложу, если что могу выложить.😃
народ кому не лень, выкладывайте сюда таблицы настроек
трикоптер, лучи 45см, несколько вялый но оч. устойчивый
Если не трудно, объясните как запускать программу? Скачал а он жалуется.
Кашляет? 😃)
Скачай и установи Java java.com/ru/download/windows_xpi.jsp?locale=ru&hos…
мои настройкиЮ немножко подколбашивает на ветру, но летать можно.
завтра попробую по описанному выше методу
Нам на лекциях по ТАУ объяснили ПИД-регулятор так: Управляющее воздействие (которое будет удерживать коптер в желаемом положении) U зависит от ошибки delta (ошибка = разница между желаемым состоянием и текущим. Например, коптер наклонен на -45 градусов, мы желаем 0, значит, delta = 0 - -45 = + 45 ).
П - пропорциональная составляющая: Up = p * delta, где р - ваш коэффициент. Если “р” слишком большое, возникнет перерегулирование, автоколебания и разрушение объекта (на небольшое отклонение коптер отреагирует резким броском и кувыркнется вниз).
И - интегральная составляющая. Ui = интеграл delta * i. В каждый момент времени вычисляется delta, полученные дельты складываются. Со временем получается значительная величина, если не установить объект в заданное положение (при этом растет и управляющее воздействие). Благодаря И-составляющей устраняется статическая ошибка (если работает только П-регулирование, то всегда требуется наличие ошибки для управления коптером: если вдруг delta =0 , то Up=0, объект неуправляем). Регулятор ПИ может обойтись без Д.
Д - дифференциальная составляющая. Ud = скорость изменения delta * d. Чем быстрее меняется ошибка delta, тем сильнее управляющее воздействие Ud. Ветер резко наклонил коптер, управляющее воздействие Ud резко возросло и вернуло коптер в горизонт. Коэффициент d задаете сами.
Итоговое управляющее воздействие: U = Up+Ui+Ud, которое должно вернуть коптер в желаемое положение.
А теперь интересная задачка: какие коэффициенты брать =)
Несколько месяцев назад встретил на форуме ссылку на очень простую OSD (без GPS) , кажется отображает только ток и напряжение АКБ, может что то еще , не помню, ценник был всего около 10$, ссылку потерял, по поиску результатов нет, может кинет кто ссылку на эту OSD, отличное дополнение для полетов по очкам всего за 10$.
Несколько месяцев назад встретил на форуме ссылку на очень простую OSD (без GPS) , кажется отображает только ток и напряжение АКБ, может что то еще , не помню, ценник был всего около 10$, ссылку потерял, по поиску результатов нет, может кинет кто ссылку на эту OSD, отличное дополнение для полетов по очкам всего за 10$.
Накладывалось только 2 напряжения.
www.cnchelicopter.com/servlet/the-1783/…/Detail
Только это раньше было за 10USD (см. www.rcgroups.com/forums/showthread.php?t=1329658#p…), теперь они извиняются перед предварительно-заказавшими за повышение цены до 23,99USD
Сегодня после работы поеду за нунчаками и мотиуном плюс, беру по две штуки того и того, по 800р.
Странные настройки при разных размерах везде винты одни и те же, вот сейчас на стадии сборки, думаю ставить винты 10х4.5 моторы tyrnigy 2830 1050kv регули 18-20 HK.
Нормально ли будет?

Для любителей трикоптеров интересно будет
Идея красивая, точнее реализация, но я почемуто противник идеи использования чахлого подшипника сервомашинки в качестве одной из двух опор мотора, если аппарат мелкий с мелкими моторками-еще куда не шло но вот с аппаратом покрупнее… 😦
Если уж зашла речь об OSD, ардиуна способна отлично передавать всю полетную телеметрию, осталось только ее чуточку проапгрейдить и научить это делать в скетче Wiiкоптера. Вот для затравочки:
www.compcar.ru/forum/showthread.php?t=6064
arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1220054359/al…
www.elenafrancesco.org/arduino/baroneosd/
может смаллтиму написать? думаю он сможет нам чем нибудь помочь
много то не надо, допустим горизонт, и напряжение для начала
Если уж зашла речь об OSD, ардиуна способна отлично передавать всю полетную телеметрию, осталось только ее чуточку проапгрейдить и научить это делать в скетче Wiiкоптера.
Ардуине банально не хватит быстродействия для одновременной отрисовки OSD и просчёта положения коптера
вы ссылочки полистайте, от нее не требуется ничего прорисовывать. от нее нам нужны данные телеметрии с датчиков, состояние батареи. сейчас же она способна вывести данные на lcd десплей.
Идея красивая, точнее реализация, но я почемуто противник идеи использования чахлого подшипника сервомашинки
Значит нужно добавить еще один подшипник, что бы уменьшить нагрузку на машинку.

сейчас же она способна вывести данные на lcd десплей.
Кстати так толком и непонял с каими дисплейчиками там всё работает окромя спаркфановских, не тли у нас чего поближе а то ждааать не люблю заказы из-за бугра