микроQUADrик на КуКе

Всем привет! Смотрю на ваше видео-интересно! Молодцы. До вас мне пока далеко. Но подскажите-почему когда вы испытываете квадрик не привязывайте его чтоб треммировать? Так никаких винтов не хватит. Сам строю трикоптер под FPV. Жду моторы и регуляторы с винтами.
Моторы пока закрепил термоусадкой, поставив на приклеенные карбоновые площадочки. Получилось достаточно крепко. Посмотрим как поведет себя в полете.
С таким креплением не стоит даже пытаться взлетать. Моторы на луче должны быть закреплены очень жестко. Иначе будут вибрировать, вектор тяги будет меняться и начнется неудержимый расколбас…
В соседней теме есть мнение, что выкос мотора на доли градуса изменяет нагрузку на него на десятки процентов. Как с этим справится мозг?
Жесткость такого крепления превышает жесткость луча.
Жесткость такого крепления превышает жесткость луча.
Если это так еще и с жесткостью луча на кручение, то - совсем плохо.
Если это так еще и с жесткостью луча на кручение, то - совсем плохо.
Если в теорию вдаваться, то шмель тоже не должен летать, но он летает. Я использовал тот же профиль, что и у автора, у него почему то летает, и очень неплохо.
Балансируйте нормально движки и лопасти и тогда не будет никаких вибраций. Китайские пропеллеры очень несбалансированные, приходится наклеивать огромный кусок изоленты, что бы вибраций небыло
У меня те же движки, к раме из деревянной линейки, вообще просто стяжками притянуты. И ничего. Леатет вроде 😃
Тяжеловат правда получился…
А вот у автора вообще акуратненький квадр вышел! 😃
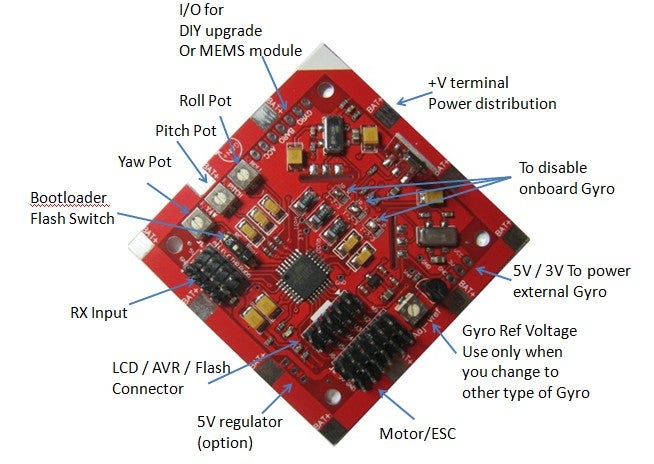
Подсказали возможную причину “колбасни”. Нужно было подстроить опорное напряжение для гир. На некоторых платах стоят специально подстроечные резисторы
Снизил немного опорное напряжение (Было 1,67в) и осциляции пропали. До этого регулировкой чувствительности невозможно было от осциляций избавиться. Нужно еще время на настройку
rcopen.com/forum/f134/topic253939/67
Если то, что тут написано верно, а это кажется очень логичным, то может попробовать моторы развернуть вниз?
Имхо, должно получиться. Нужно конструкцию придумать…
Да, я тоже присматривался к этой конструкции, но это на будущее.
Выявил проблему почему у меня не летал квадрик 😃 Будуту смеяться, но оказался неисправный балансир. Заряжал банки до 3,6-3,8 вольт. На него то я подумал в последнюю очередь. Так что и первая конструкция скорее всего была полноценно летабельная, только требовала более тщательной настройки.
А я ведь спрашивал, батарейка заряженая? ))
Тот кто мне отдал балансир, утверждал что он исправный, и заряжает лучше всяких айМаксов, и очень хорошо балансирует 😃
я проверяю заряд этим - banned link
я проверяю заряд этим - banned link
Да уже зарядное и такой тестер заказаны, жду
Обнаружил трещину в квадратной карбоновой балке, изгибние показало плозую прочность. Решил заменить єтот рпофиль на трубочку карбоновую 5мм. Веса добавилось незначительно, но прочность и жесткость возрасла в разы.


Ну и пробный утренний взлет. У меня на пульте DX4i экспонент нет, а реакция на стики очень резкая, даже с учетом того, что расходы 60% на пульте включены. По этому держать в центре плохо получается, нужно как то затупить еще реакцию.
www.youtube.com/watch?v=80MuV8NXwxM
з.ы. Пульт сменить не предлагать 😃 Сам знаю, что нужно.
А собачка то умная, ушла от греха подальше!😁
А собачка то умная, ушла от греха подальше!😁
Да он уже привыкший. Просто один раз на СМПХ кинулся, поиграться - по носу лопастью получил, с тех пор со стороны наблюдает 😃
Ну и пробный утренний взлет. У меня на пульте DX4i экспонент нет, а реакция на стики очень резкая, даже с учетом того, что расходы 60% на пульте включены. По этому держать в центре плохо получается, нужно как то затупить еще реакцию.
Мултивий лучше летает 😃) Пульт такой же, если что. Правда у меня квадрик 400 грамовый. И кстати зря говорят что маленькое расстояние между пропами плохо, у меня 1 см при 7" пропах - все отлично, и ветра не боиться, хотя когда он по комнате летает, пачку с сигаретами со стола сдувало 😃
Ты хотел сказать не летает, а стабилизирует 😃 Летать можно красиво и на КУКе. Кстати я еще подстроил гиры, и подтриммировал, теперь стало еще стабильнее. На видео квадрик кидало не стабилизацией, а очень резким откликом на стики.
А вот вес играет большое значение, больше инерция и выше стабильность. Это как вертолеты 250ка и 600ка.
Вот квадрик на плате с ХоббиКинга
www.youtube.com/watch?v=PDn_XIneAZA
стбильный как табуретка. Прошивка такая же как и у меня.
На видео квадрик кидало не стабилизацией, а очень резким откликом на стики.
Turnigy 9x наше все 😃) Но приемыши там… весят как чугунный мост, а мне 7 каналов надо 😦 4 + пан/тилт камеры и режимы полета…
На комнатном мелкоквадрике я его как элемент прочности использовать буду 😃), нЕфига ~2х мм текстолиту внахаляу летать 😃
А код этот открытый? я могу попробовать, как время будет, экспоненту в код КУК вписать, че сразу пульт то 😃)
Мой на вии, не уступает по стабильности чертенку (в том числе наплевательское отношение к ветру) и дело тут не только в весе в 10 больше 😃 Он конечно тяжелее, на стабилизируется фиксированным шагом а не сервами.
В КУКе вроде просто § регулятор, в Вии PID
Turnigy 9x наше все :
Ну я больше к спектруму склоняюсь.
По поводу открытого кода я не в курсе, нужно узнать.
У тебя Вии с акселями?
У тебя Вии с акселями?
Adxl 345 ломиться нашей любимой почтой. Выпиленный из нунчака нормально работать не захотел.
Пока на гириках летаю.
Чем хороша турнига, ее курочить не жалко. Теже очки и headtracker запитать(что бы не держать 100 акков) от аппы - этож разьъем впаивать, а спектрум курочить жалко, тем более 8 канальный стоит как самолет, а 9X отлично работает всего за 2000 наших.