SteadiСopter

Так же выяснилось, что Force Servo сервомеханизм дает опредеоенные преимущества при управлении рулями (например, на лодке или самолете). На этой неделе будем испытывать два корабля с новым управлением.
При управлении рулями все таки нам нужно выдержат точный угол, который и задается PWM-сигналом. Как тут можно прbменить F-Servo? или нужен промежуточный контроллер?
При управлении рулями все таки нам нужно выдержат точный угол, который и задается PWM-сигналом. Как тут можно прbменить F-Servo? или нужен промежуточный контроллер?
Работает так же как и на больших пилотируемых аппаратах. Пока легкий самолет (без усилителей на рулях) стоит на земле, то рули находятся в случайном положении. В плете поток воздуха через рули и тяги возвращает штурвал в нейтраль. Что бы повернуть нужно приложить силу к штурвалу.
Вот еще перевод моего текста с английского:
Изобретение позволяет упростить многие механические устройства, в которых требуется контролировать силу воздействия сервомеханизма или силу воздействия механизма, контролируемого сервомеханизмом. Изобретение позволяет улучшить технические характеристики многих устройств, при использовании его вместо сервомеханизма с контролируемой позицией исполнительного органа. Основная область применения – дистанционно управляемые легкие аппараты, роботы, радиоуправляемые модели, поворотные устройства для видеокамер. Особенности применения сервоприводов для управления видеокамерой описаны в разделе «the Evolution». В робототехнике сервопривод может использоваться в механических манипуляторах для захвата хрупких предметов. Если Force Servo используется в рулевых устройствах транспортных средств, то это позволяет автоматически повышать маневренность на малых скоростях и ограничивать гравитационные перегрузки на высоких скоростях. Например, контроль силы воздействия на воздушном руле предотвратит разрушение самолета при маневрах на высокой скорости (при использовании Position Servo используют ручной режим ограничения “Dual Rates”).
Благодаря контролю за силой воздействия, предотвращается поломка устройства при заклинивании руля. Force Servo позволяет использовать электронный гироскоп в режиме Heading Hold. Благодаря этому электронная стабилизация обеспечивает более точную траекторию движения аппарата.
Вопрос получил в личку, отвечу публично.
Маленькое ЧаВо по модификации Ecilop на F-Servo.
- На сколько мне известно, модифицируются все сервы, кроме Turnigy Mi серии (магнитный энкодер).
- Сервы не включать, пока леска не натянута (обеспечение обратной связи)
- Система тяни/тяни более точно передает смещение, чем система тяни/толкай. Так как передаваемое усилие очень мало, то тонкая леска подходит оптимально. Натягивать сильно не требуется, но натяжение обязательно. Если леска не натянута, то серво может дрожать.
- Для автоматического выравнивания используются контроллеры, устанавливаемые на подвесе. Например Tarot ZYX-GS.
- Сигналы с бортового контроллера не используются (например - Naza), так как определять положение камеры через пересчет наклона основы - заведомо менее точный способ.
- Настраивается оборудование точно по инструкции. Если это гироскоп, то увеличивать гэйн до возникновения колебаний и потом немного вернуть назад.
Примеры моих настроек можно скопировать сделав паузу на видео (уже выкладывал выше):
вопрос по zoom lens controller
он только для 18-55 подходит? я так понимаю если линза больше в диаметре - просто физически не поместится?
вопрос по zoom lens controller
он только для 18-55 подходит? я так понимаю если линза больше в диаметре - просто физически не поместится?
Диаметр подогнан точно под NEX камеры.
всмысле? адаптер для зумирования крутит камеру а не кольцо объектива?
всмысле? адаптер для зумирования крутит камеру а не кольцо объектива?
Пардон, все крепится на объектив. Серва Turnigy 380MAX


да… но например объектив SEL1670Z тоще 18-55… это не проблема?
да… но например объектив SEL1670Z тоще 18-55… это не проблема?
Это проблема, исправлю описание. Спасибо.
вопрос по Force Servo upgrade
я так понял надо выпаять внутрений потенциометр и заменить его внешним? а зачем отпаивать servo drive? как видно на фото
вопрос по Force Servo upgrade
я так понял надо выпаять внутрений потенциометр и заменить его внешним? а зачем отпаивать servo drive? как видно на фото
Если вы имели ввиду моторчик сервомеханизма, то его отпаивать не нужно, если можно добраться до потенциометра без этого.
ааа… вы снимали плату - отпаивая потенциометр и моторчик? я вынул плату не отпаивая их… правда у моторчика отделился корпус ))
Алексей, можно попросить схему подключения подвеса в версии с ZYX-GS?
Алексей, можно попросить схему подключения подвеса в версии с ZYX-GS?
На моем прототипе последовательность устройств такая:
Приемник > ZYX-GS > гироскоп > серва
На ZYX-GS и на гироскоп от приемника идут еще два канала для управления режимом. Если двух свободных каналов для этого нет, то можно использовать генератор двух фиксированных ШИМ (PWM) сигналов (сервотестер). Я вместо сервотестера мастерил самодельный микро-генератор, который синхронизировался с приемником (на всякий случай, что бы последовательность сигналов была постоянной). Но многие брали обычные миниатюрные сервотестеры. А теперь я использую 12-ти канальную аппаратуру и этого хватает на все нужды. По минимуму Ecilop Easy можно сконфигурировать с восьми-канальной аппаратурой.
Выпущено усовершенствование для усовершенствования.
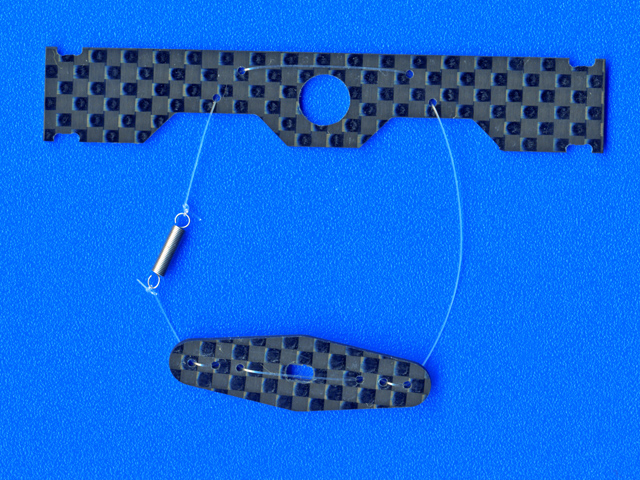
На аппарате Ecilop Easy/Stereo использована леска для вращения потенциометра.
В процессе эксплуатации леска может быть растянута и натяжение будет утрачено.
Что бы этого не происходило, устанавливается пружина, которая обеспечит постоянное натяжение.
Завяжите концы лески на пружине. Пружина устанавливается только с одной стороны качалки.
Пружина должна быть растянута до длины 15-25мм (длина до растяжения -10 мм).
Всем, кто купил F-Servo upgrade дополнительные пружины высланы бесплатно.
А если вместо лески использовать тонкую металическую нить?
А если вместо лески использовать тонкую металическую нить?
Тогда уже лучше установить жесткую тягу. Смысл в том, что система тяни/тяни точнее, и соединение должно быть гибким. Рыболовная леска предназначена для весьма жесткого использования, но с пружиной постоянное натяжение обеспечивается лучше.
Пример настроек последнего прототипа Ecilop Easy
Комплект:
Ecilop Easy frame
MT3506 motors
12”x4” VOX propellers
T-motor 18A speed controllers
5800mA/h 4S battery
DJI NAZA + GPS flight controller
MKS DS8910A servo
Turnigy mini MEMS gyro
ZYX-GS gimbal controller
Futaba R6014FS receiver
Sony NEX-5 camera, 18-55mm lense
Shutter and Record remote controller
Zoom servo
HDMI to AV converter
Simple OSD module
200 mW 5.8Ghz transmitter
Futaba T12FGH Remote
Turnigy 9X transmitter
FrSky V8HT TX module
FrSky D8RSP receiver
Video Goggles 640x480, Dual Rx
Lilliput 7” field monitor
Video receiver
Belt mount
Гироскоп Turnigy MINI MEMS, настройки:
Servotyp 076-50
Gydirect NORM
Mid-trim 000
H-limit 200
L-limit -200
Rpirgain 150
Lpirgain 150
Acc-exp 010
Dec-exp 010
Deadband 005
Rud-gain 050
n-rudexp 000
a-rudexp 000
Gain -100%, режим Normal
Ecilop Easy пружины 0.4N/mm
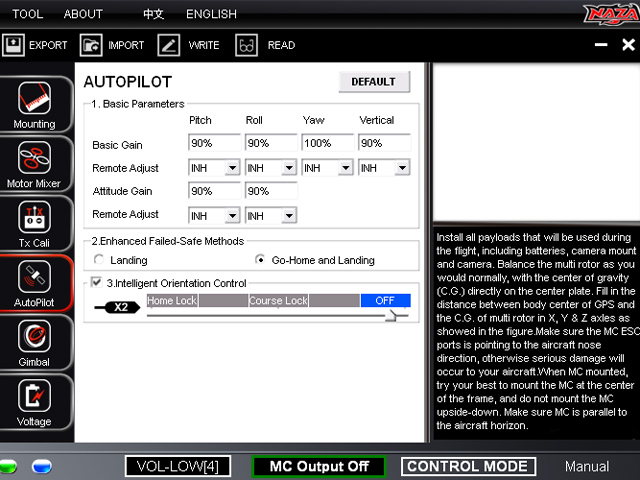
Настройки Naza:
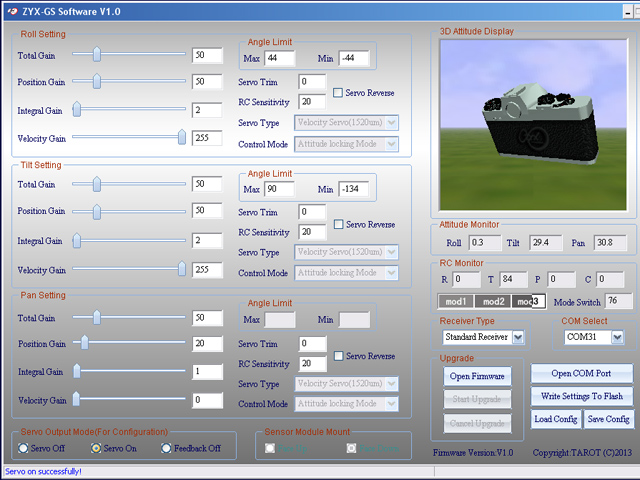
настройки ZYX-GS:
Получил вопрос о причинах дрожания сервомеханизма (Ecilop Easy, Force Servo).
Возможны такие предположения:
- Слабое натяжение лески (пружина должна быть растянута с 10 до 20мм).
- Высокое значение усиления для гироскопа (пропадет дрожание при снижении усиления).
- На корпус гироскопа передаются вибрации от сервомеханизма (использовать для гироскопа мягкие прокладки с промежуточной металлической пластиной и провод изогнуть петлей)
- Дефект в потенциометре (обычно дрожание проявляется в определенном положении качалки потенциометра).
- Заедание шестеренок (качалка сервомеханизма с трудом вращается пальцами при выключенном питании).
- Контроллер положения генерирует странный сигнал управления (проверяется при помощи сервотестера).
По описанию производителя ресурс потенциометра - не менее 1 000 000 поворотов.
Если обнаружены заедания в редукторе, то зачастую помогает следующее:
разобрать сервомеханизм, покрутить в ручную все шестерни на их осях и убедившись, что заеданий больше нет, собрать обратно.
Мы тестировали каждый модифицированный сервоммеханизм.
Это демонстрация теста исправного серво-механизма:
Дефект сервомеханизма DS8910A+
Мы обнаружили, что в сервомеханизмах DS8910A+ часто возникает заклинивание одной шестерни. Если качалку сервомеханизма трудно покрутить пальцами, то это признак проблемы. Проблема может проявиться не сразу. Сперва сервомеханизм может работать нормально (ось прокручивается в пластиковом корпусе). На аппарате Ecilop это нарушает работу подвеса камеры.
Для устранения проблемы необходимо разобрать редуктор сервомеханизма. Обратите внимание на вторую шестерню в редукторе. Эта шестерня может быть заклинена на своей оси. Иногда достаточно вытащить ось и вставить обратно другим концом. Так же можно вставить в отверстие шестерни сверло 1,2мм и вращать пальцами. Перед сборкой нанесите на ось смазку. После сборки убедитесь, что механизм легко вращается.
Мы приносим извинения за эту проблему. Если вы не желаете самостоятельно разбирать сервомеханизм, то можете выслать его нам для бесплатного сервисного обслуживания. Мы не знаем, как часто эта проблема возникает. На всякий случай проверьте свои сервомеханизмы. Мы сейчас разбираем и проверяем все сервомеханизмы на нашем складе.
Процедура проверки продемонстрирована на видео.
Достигнут прекрасный результат с контроллером ZYX-GS V1.2. Процедура настройки предельно проста. Дополнительные гироскопы не требуются. Повторяемость при возврате камеры в заданную позицию составила 10 угловых минут.
На видео продемонстрированы три варианта конфигурации подвеса:
- Гироскопы Mini MEMS в режиме Heading Hold
- Гироскопы в режиме Normal и датчик вектора гравитации X-CAM
- Контроллер подвеса ZYX-GS V1.2
В данном случае 10 угловых минут – это не математическая точность отдельного датчика, а результат работы всего устройства целиком. В 8 случаях из десяти лазерный луч после короткого отклонения возвращался на прежнюю позицию с разбросом значений менее 0,15 градуса.
Результат близок к пределу дискретизации обычного сигнала управления.
Объяснение: если предел отклонения камеры установлен в интервале 90 градусов, а PWM сигнал управления оценивается с точностью 1024 шага, то получим точность заданной позиции в 5 угловых минут.
Тут демонстрация лабораторных измерений на ином прототипе: