ДВС - квадрокоптер с изменяемым шагом из Австрии.

Наш уважаемый коллега Олег Шешеня (Oleg(Ox)) побывал в австрийском музее авиации “Aviaticum” и поделился фотоотчетом. Большое спасибо, кстати 😃
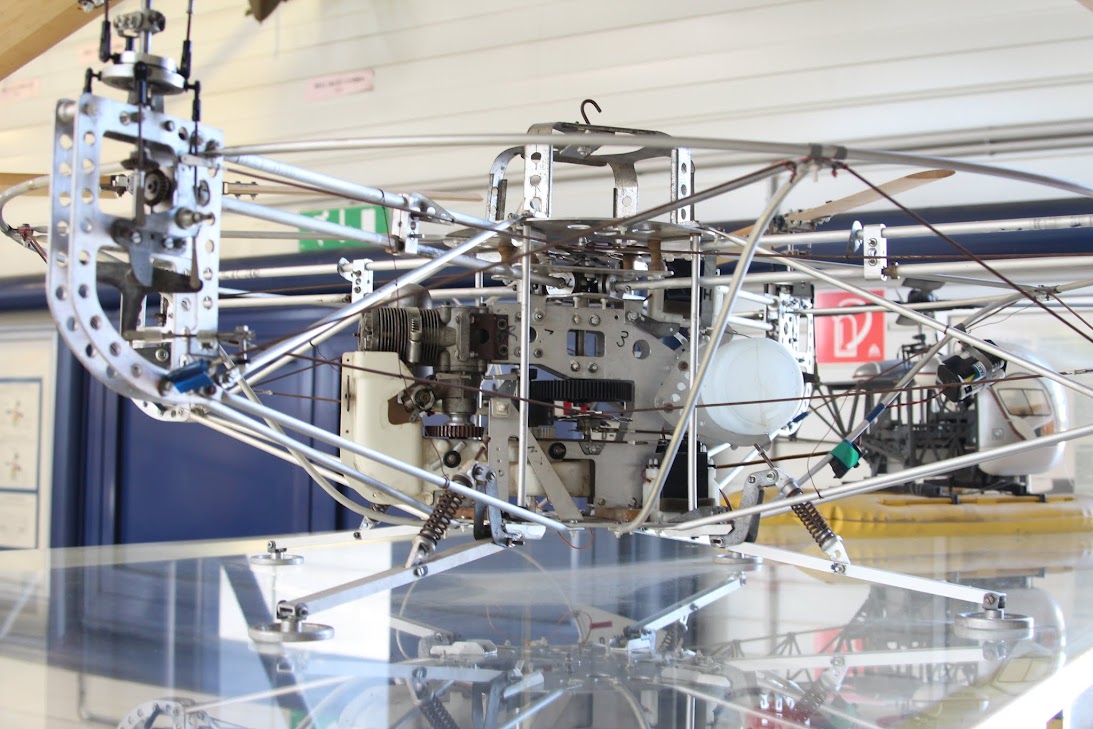
Так вот, среди фоток был радостно опознан ДВСный квадрокоптер! Система управления винтами собрана из деталей автомата перекоса основного ротора. Механика управления видна к сожалению не детально, но в принципе смотрибельна. Предлагаю обсудить данный аппарат в разрезе повторения модели. У нас есть уже несколько пару тем про изменяемый шаг из деталей хвостового ротора, но думаю это тоже будет интересно.
Ну и фотки от Оега:




Фотки большого размера смотрите в фоторепортаже Олега
вот кстати ещё вариант рабочий, с подробностями, правда не двс
…openpilot.org/…/9490-variable-pitch-quad-copter-u…
вот кстати ещё вариант рабочий, с подробностями, правда не двс
…openpilot.org/…/9490-variable-pitch-quad-copter-u…
Это тоже из деталей ХР вертолёта. Сделать проще, но есть проблема с поворотом вокруг оси “Z”.
Тут-же, имеется полноценная ТАП, так что можно реализовать управление креном и он уже будет вертеться.
“Где у “них” управление общим шагом? крен - одной тягой через качалку, тангаж тоже одна. Для микса общего шага нужно три тяги. Единственный вариант если ось качалки подвижна и управляется тягой тангажа. Тогда верхняя тяга управляет шагом, а нижняя наклоном, если вообще там есть управление, т.к. странно находится ось наклона относительно тушки.”
А смысл делать квадрокоптер такого размера и мощности, если уже дешевле и проще сделать (купить) ДВС вертолет? Я тут никаких преимуществ коптера не вижу уже (простота изготовления, относительно легкий вес, малошумность и т.д.)
ужОс сколько механики, имхо преимщество электро коптера именно в простоте конструкции, а тут шлепнется и замучаешся чинить.
Ну его наверное сделали, когда мультиротор уже придумали, а БК-системы, ещё нет. А смысл я вижу в увеличении времени полёта, “грузоподъёмности” и простоты управления. Я вот например на квадрике спокойно летаю, а на вертолёте (600-ка) быстро взмокаю. Имхо, его стезя не полетушки во дворе, а дальние полёты FPV и/или по точкам жпс. Дорогой он получиться в любом случае. Даже дешевые (жутко люфтящее и криво собранные) безфлайбарные кит-комплекты ОР и ТАП стоят баксов по 20 + шестерёнки, обгонки и т.д. и.т.п. уже не говоря о большом количестве оригинальных деталек (привет токарям и фрезерам) Да и “мозги” нужны серьёзные + возможность доработки кода.
Но две рейки крестом + четыре DT750 + KK2.0 это каждый сможет осилить, а тут такая красотень 😉 Лично у меня хватит мозгов такое сделать, по крайней мере механичесскую часть, но к сожалению, нет на это ресурсов. Так что я тут только теоретик.
сршенно, ИМХО, бессмысленный аппарат. Упадет - контейнера не хватит для мусора 😃
вот если сделать пентакоптер, т.е. по сердине двс с винтом ~ 22" , а по диагоналям обычные моторчики электро для подруливания, вон это будет зыко. Опять же с вибрациями от ДВС придется ох как пом**хаться.
вот если сделать пентакоптер, т.е. по сердине двс с винтом ~ 22" , а по диагоналям обычные моторчики электро для подруливания, вон это будет зыко. Опять же с вибрациями от ДВС придется ох как пом**хаться.
Такой проект уже встречался здесь в виде видео, т.е. летающий. Но опять-же, “управляющие” винты от акка (+вес, -время), вот если бы поставить на ДВС, генератор, для этих моторов… А насчет
контейнера не хватит для мусора
, я же говорю - дорогой проект 😃
Но опять-же, “управляющие” винты от акка (+вес, -время), вот если бы поставить на ДВС, генератор, для этих моторов… А насчет
А зачем эти генерации и т.д.? Это все лишний вес, снижение эффективности и т.д… Если такая схема позволит летать коптеру час, а не 20 минут это уже прорыв.
красиво летает конечно, сорри, что не ДВС и управляется с компа (ну типа офтоп)
Видос класс переворот на месте без просадки высоты и самое главное коптер в инверте.
Интересно какой мозг и когда кто-нибудь выпустит доступный вариант?
маневренность просто отличная.
Попросил Олега прислать “исходники” фоток, для детального изучения конструктива. Излагаю накопанное:
На модели стоят три сервы. Одна на привод дросселя, вторая управляет наклоном ТАП по “Х”, третья управляет наклоном ТАП по “Y”. Причём наклон по тангажу выполняют все ТАП в одну сторону, чем обеспечивается полёт вперёд-назад, а наклон по крену выпоняется двумя “передними” - влево, а двумя “задними” - вправо, чем обеспечиватся поворот вокруг “Z”. Из этого делаем следующие выводы" - конструктивно выполнена схема Х-квадрика, и если он и летает, то только блинчеком. А так как, управление общим шагом конструкцией не предусмотренно, как и управление наклоном модели относительно Ц.Т., то данная модель была скорее эксперементальной разработкой (что подчёркивает крюк сверху) , а не действующим прототипом. И схема вращения винтов тоже странная. Но выполненно всё основательно и добротно.
З.Ы. Схема управления полётом похожа на простой соосник с фиксированным шгом но имеющий ТАП. Так что, возможно оно и летало, правда изменение Ц.Т. из-за расхода топлива могло давать не компенсируемый, нарастающий крен и оппаньки…