Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

Подскажите плз!
Оригинальный ли AlexMos в подвесах на ebay?
Я получил на днях такой, обновляется без проблем, пищалка на борту, место под чип для блутуза с обратной стороны, два разъема под датчики, Алексей уже писал что он не лимитирует цены, тут качество сборки вроде как ниже чем европейский вариант, ну и если что то бежать к китайцу за гарантией не айс
У меня подвес 2 осевой китайский с датчиком MPU6050 периодически плывет при повороте по Yaw (как у большинства). Можно ли к нему подключить вот такой ru.aliexpress.com/item/…/2024503421.html датчик? Будет ли лучше, и вообще совместимость реальна?
поддерживается только mpu6050 … 3205(3200) не поддерживается , 345 аксель тоже не поддержэивается , так что работать небудет …
32бит версия начиная c 2.56 поддерживают еще ICM20608 … насколько лучше пока незнаю , купил несколько штук на пробу , но они застряли в китае , НГ однако …
У меня подвес 2 осевой китайский с датчиком MPU6050 периодически плывет при повороте по Yaw (как у большинства). Можно ли к нему подключить вот такой ru.aliexpress.com/item/…/2024503421.html датчик? Будет ли лучше, и вообще совместимость реальна?
Откалибруйте по 6 осям.
AlexMos 32 bit RCTIMER
Настраивал ПИД включал и выключал кабель USB к контроллеру и в один прекрасный момент программа перестала подключатся к плате.
В итоге:
Порт СОМ драйверы на компе создают, при подключении второй аналогичной платы все работает.
Питание на контроллер через USB поступает, подвес работает.
Подключился через внешний кабель FDTI в порт где подключается блуетуз, программа плату видит.
Пробовал пере прошить, сбросить EEPROM, сбросить профиль, не помогает плата программой все равно не видится через USB
Что могло сгореть, на что обратить внимание?
испортился кабель?
3 кабеля поменял 2 компа и с другим контроллером работают кабели.
Есть у меня подозрение на микросхему cp2102, хотя она обнаружатся драйверами компа.
Судя по дорожкам то контакт TX с UART разъёма блуетуза идет на прямую на проц и сp2102 а другая дорожка с прца идет через диод на контакт RX UART разъёма блуетуза и через еще один диод на вход cp2102
на диодах сделана развязка , чтобы блютуз и CP2102 друг другу не мешали …
они своими ТХами через диоды дергают на землю RX контроллера …
смотреть в первую очередь пайку RX/TX CP2102 ну и диод …
Продолжение.
Запустил утилиту CP21xx Customization Utility из пакета USBXpress с сайта SiliconLabs
Это с рабочей cp2102
img-fotki.yandex.ru/get/…/0_166e97_500ff1b7_orig
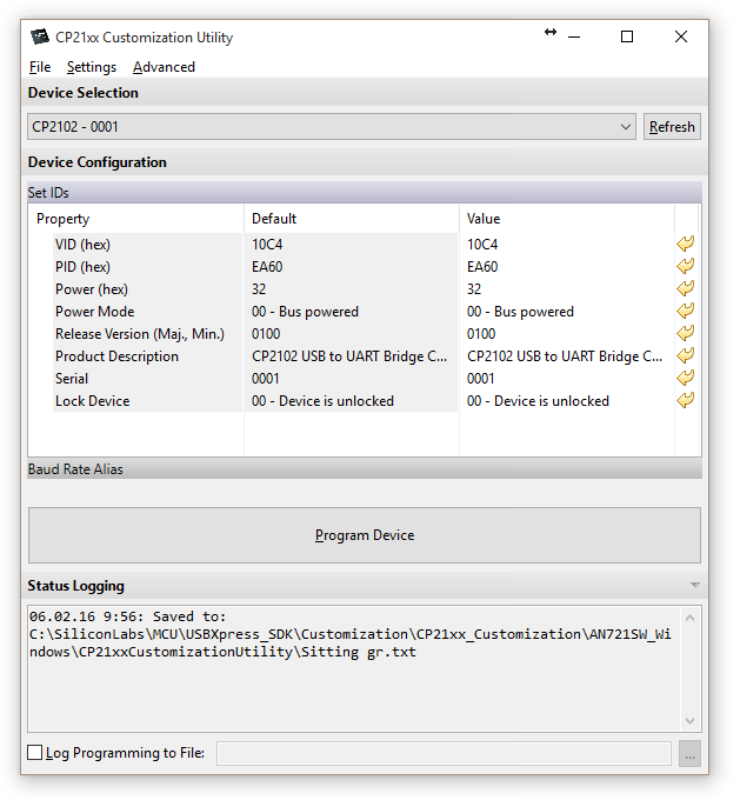
А это с проблемной cp2102 которая стоит на плате подвеса.

Ведать наверно слетели настройки микросхемы cp2102, только как их восстановить?
парни кто нить может обьяснить почему дырки для крепления демпферов подвеса тбс сделаны не на одной прямой а по окружности?тут какая то хитрость или это просто для уменьшения размера
конечно для уменьшения размера по горизонтали
может всеже есть какая то логика,вроде плечо силы разное и демпферы разной жесткости.
Мужики, хочу прошить подвес на контроллере martinez. Раньше прошивал и все нормально было. А сейчас в процессе выдает такую ошибку:

Что может быть, подскажите пжл…
Делаю по видео Юлиана.
гироскоп (маленькая платка такая) похоже, что не работает.
может кто подскажет, откалибровал подвес, все вроде нормально, но когда квадрик поворачивает в право или в лево, камера на подвесе начинает крениться в бок
поворачивает в право или в лево, камера на подвесе начинает крениться в бок
Посмотрите внимательно на крепление датчика. Вероятнее всего он закреплен со смещением , относительно плоскости камеры. Там достаточно небольшого перекоса и горизонт будет гулять. И как припаян к плате.
ну “вроде нормальная” калибровка не факт шо на самом деле нормальная
самая нормальная - это когда датчик крепят на куб
на ютубе видел видео такой калибровки
менял расположение датчика и не особо помогло
менял расположение датчика и не особо помогло
Фото датчика покажите.
менял расположение датчика и не особо помогло
откалибруйте по 6-ти осям
откалибруйте по 6-ти осям how to - SBGC 6 point IMU calibration
Интересная тема, буду так же делать. А то у меня на 90гр. не поворачивается подвес, рама мешает. И коробасов от т-моторов много)
Но вот задача - почему нельзя научить датчик сразу и больше не переучивать? Почему не приходится, скажем, на инспайре периодически объяснять его камере, где ноль?