Квадрокоптер Syma X5

Одной банки вполне достаточно для БК двигателя. Для установки БК двигателя просто нужна плата-регулятор для БК, которая управляется напрямую от выводов под коллекторный мотор. Такие есть и давно. Маленькие вертолеты на 1S люди давным-давно переделывают на БК без проблем. Платка подключается напрямую к выходу на коллекторный мотор, а к платке уже подключается БК мотор. Нет никаких проблем. Все легкое, маленькое и доступное. Можно почитать в темах про переделку вертолетиков на БК моторы. Там вся инфа есть.
Одной банки вполне достаточно для БК двигателя. Для установки БК двигателя просто нужна плата-регулятор для БК, которая управляется напрямую от выводов под коллекторный мотор. Такие есть и давно. Маленькие вертолеты на 1S люди давным-давно переделывают на БК без проблем. Платка подключается напрямую к выходу на коллекторный мотор, а к платке уже подключается БК мотор. Нет никаких проблем. Все легкое, маленькое и доступное. Можно почитать в темах про переделку вертолетиков на БК моторы. Там вся инфа есть.
только вот БК мотор потребляет несколько Ампер или десятков Ампер (смотря от количества витков в моторе), а коллекторные сотни миллиампер! то есть 1S акк не сможет отдать столько тока на 4!!! БК движка… на вертолет, где 1 БК двиг может и хватит 1S акка.
- по электронике характеристики разных коллекторных моторов разные, не говоря если сравнивать БК и коллекторные системы… вообще как небо и земля) Прошивка микроконтроллера на симе будет думать что у вас стоят коллекторные моторы, в независимости от того что вы воткнете туда регули + БК, ну и разумеется будет подавать управляющие сигналы исходя именно с тех характеристик которые зашиты в нее… так что думаю подобная переделанная сима вообще никуда не полетит, максимум вам удастся взлететь и повисеть, при любом нажатии на стик вас перевернет скорее всего )
Собственно вся фишка в квадриках в правильном и точной управлением всеми 4мя моторами одновременно, поэтому именно квадрик переделать на БК моторы без перепрошивки мозгов - вам не удастся… а на симе мозги не прошиваются к сожалению, да и прошивки нет ( а вот для систем где 1 мотор (вертолеты, машинки, лодки) - вот там пожалста, там получится переделать.
кароче выкините просто деньги от затеи переделать с коллекторного на БК симу) кстати поискал ветку про переделку именно квадриков на БК, разумеется не нашел, если у вас есть пример такой переделки рад буду прочитать
так что думаю подобная переделанная сима вообще никуда не полетит, максимум вам удастся взлететь и повисеть, при любом нажатии на стик вас перевернет скорее всего )
Собственно вся фишка в квадриках в правильном и точной управлением всеми 4мя моторами одновременно, поэтому именно квадрик переделать на БК моторы без перепрошивки мозгов - вам не удастся…
Ой я смотрю вы все же не в курсе теории полетов и управления квадрокоптеров. Ничего прошивать не нужно - квадрокоптер ето стабилизированная система с обратной связью, которая стремится компенсировать внешние возмущения, будь то более мощный движок с одной из сторон, или порывы ветра, замена двигателей на более мощные всего лишь прибавит маневренности квадрокоптеру. Да для безколекторных двигателей нужно специальное управление, там нужно в определенной последовательности коммутировать обмотки, но я уверен что есть преобразователи или можно сделать преобразователь из шим сигнала который идет от микропроцессора.
можно добавить несколько простеньких модулей которые позволят записывать на флешку полетные данные, ну скажем высоту + ускорения + крены + мож еще чего нибудь придумаю - не пропадать же ардуине полу-пустой ))
Чтобы измерять высоту вы туда жпс хотите поставить?
Ну а вообще насчет переделки двигателей квадрокоптера, то помоему ето не выгодно, так как чтобы переделать нужно как минимум 4 движка баксов по 30, 4 платы управления для движков по 10$, заменить аккумуляторы на 2-3S за 40$. В итоге если к етому всему добавить какую нибуть простую плату управления типа той же Кваддуино за 15$ и раму за 10$, при етом выкинуть все от симы, то выйдет совершенно новый аппарат, другого класса. Ну правда пульт еще нужно докупить.
Ой я смотрю вы все же не в курсе теории полетов и управления квадрокоптеров. Ничего прошивать не нужно - квадрокоптер ето стабилизированная система с обратной связью, которая стремится компенсировать внешние возмущения, будь то более мощный движок с одной из сторон, или порывы ветра, замена двигателей на более мощные всего лишь прибавит маневренности квадрокоптеру. Да для безколекторных двигателей нужно специальное управление, там нужно в определенной последовательности коммутировать обмотки, но я уверен что есть преобразователи или можно сделать преобразователь из шим сигнала который идет от микропроцессора.
Чтобы измерять высоту вы туда жпс хотите поставить?
как раз то знаком с теорией как оно управляется) в том то и дело что стремясь компенсировать порыв ветра или стремясь отреагировать на отклонение стика МК симы даст больше тактов на вход одного из моторов (не важно коллекторынх или без коллекторых) - с этим все хорошо… НО ! так как при изменении характеристик моторов (которые прошиты в МК симы) то то количество тактов которое было небольшим для коллекторного мотора (например когда сима захочет скомпенсировать небольшой ветерок) для БК мотора будет означать что один из моторов просто рванет вверх (то что вы назвали “лишь прибавит маневренности квадрокоптеру” - на деле окажется что квадр делает флипы сам по себе) - по причине разных характеристик моторов) по поводу что это можно отрегулировать регулями (они есть) - с этим все тоже в порядке, но вам прийдется подбирать специальные коээфициенты PID потому что идеала не бывает, один мотор чуть лучше собран, один регуль чуть чуть имеет характеристики по току другие, развесовка самого коптера не идеальна и тд, чтобы это скомпенсировать и существуют выравнивающие коээфициенты PID… куда вы их зашивать хотите?)) вот поэтому я писал о невозможности прошивки мозгов симы… можно конечно сделать свои регули на МК специально для симы, которые будут преобразовывать сигналы от типовой эл. схемы симы в те которые необходимы именно вашему квадру-мутанту ) но кто будет этим заниматься? я вот например бы не взялся сделать свои собственные регули на МК, с дальнейшими мучениями по подгонке прошивки таких регулей именно под ваш кадр (те самые PIDы прийдется зашивать туда)
На хабре есть кстати статья как собирали свой коптер на БК моторах с нуля (на Arduino), вот там хорошо и доступно разжевана теория и почему не следует заниматься подобными мытарствами с собственными регулями и прошивками ) что уж говорить о таких вещах, когда тут народ просто пищалку на коптер приладить не может )
ПС: чтобы не разводить холивар, может у кого есть реальный опыт (ну или мож кто видел подобные темы) по переделке любого дешевого квадра с коллекторных моторов на безколлекторные? тогда буду рад обсудить по существу )
Чтобы измерять высоту вы туда жпс хотите поставить?
-нет, барометр ) благо стоит копейки, весит пару грамм… точность ±2м, что достаточно…
На хабре есть кстати статья как собирали свой коптер на БК моторах с нуля (на Arduino), вот там хорошо и доступно разжевана теория и почему не следует заниматься подобными мытарствами с собственными регулями и прошивками ) что уж говорить о таких вещах, когда тут народ просто пищалку на коптер приладить не может )
Ну я с вами вобщем согласен, и то что летать весьма коряво будет очень высока вероятность. Потраченное время на такую доработку не стоит того
А вот для пищалки, необходимо чтобы она от 3 вольт работала. На 3,2 - 3,3 начинает делать аварийную посадку, и садит где то до 3-3,1 вольт. До 2,9 вольт можно пищать. Тоесть запаса батареи для пищалки остается мало. Хотя если в начале полета квадрик улетел ето не страшно. Можно подключится на выход управления одного из движков и если в течении определенного интервала нет импульсов включать пищалочку. Можно еще повесится на выход управления камерой, там при фотографировании имульс кажется 0,3 секунды, а при сьемке 0,8 секунд, от него тоже включать пищалку.
-нет, барометр ) благо стоит копейки, весит пару грамм… точность ±2м, что достаточно…
Ну тогда уж и NRF24L01 по нему же и пищалкой управлять… 😃
NRF24L01
А какая дальность, скок весит
Ну я с вами вобщем согласен, и то что летать весьма коряво будет очень высока вероятность. Потраченное время на такую доработку не стоит того
А вот для пищалки, необходимо чтобы она от 3 вольт работала. На 3,2 - 3,3 начинает делать аварийную посадку, и садит где то до 3-3,1 вольт. До 2,9 вольт можно пищать. Тоесть запаса батареи для пищалки остается мало. Хотя если в начале полета квадрик улетел ето не страшно. Можно подключится на выход управления одного из движков и если в течении определенного интервала нет импульсов включать пищалочку. Можно еще повесится на выход управления камерой, там при фотографировании имульс кажется 0,3 секунды, а при сьемке 0,8 секунд, от него тоже включать пищалку.
есть и 3х вольтовые пищалки (рублей 30-50 за штуку в москве) или поставить небольшой доп акк например от компьютерной материнки и соединить последовательно с основным аккумом и на пищалку с этим больших проблем нет в общем) собственно меня больше заботит что эту пищалку не будет слышно когда квадр далеко и из-за шума самого квадра… вот думаю все же рациональнее извещалку о низком уровне заряда сделать прям в пульте, а вот для поисков да, пищалку на квадре сделать по кнопке фото с пульта чтоб пищала) Кстати, я заметил на пульте есть пищалка, поэтому вопрос: а вот когда фоткаешь или включаешь камеру эта пищалка как то реагирует ? или мож какой нибудь светодиодик там мигает ) - то есть понять у них там односторонняя связь с пультом по кнопке фото или все же двухсторонняя…
односторонняя связь с пультом по кнопке фото или все же двухсторонняя…
Одностороння к сожалению. Ет уже нужно ставить чтото типа тогоже NRF24L01 в квадрик пульт, но оно на 2,4 ГГц работает как и квадрик, может забивать канал, темболее непонятко как квадрики выбирает несущюю частоту для передачи.
Самое простое для извещения мигать теми же светодиодами, а при потери связи пищать чтоб в огороде можно найти было.
Ну тогда уж и NRF24L01 по нему же и пищалкой управлять… 😃
ну есть сведения что эта “китайская капля” в симе и есть NRF24L0 (во всяком случае на X6 точно там NRF24L0), то есть можно припаяться прям туда… у меня осцилл есть, как симу куплю посмотрю что там к чему )) мож и доп модуль не придется тащить (хотя этот NRF24L01 пару грамм) … по поводу гироскопа те же мысли, в симе он есть, с тех фото что я нашел там самый обыкновенный дешевый гироскопчик (не китайская капля - что радует), к нему реально припаяться и получать инфу прям с “бортовых датчиков” симы )
Пришел ко мне вчера квадрокоптер, доволен как слон! Когда я взлетел на нем первый раз, он просто плавно поднялся вверх и практически завис! Его стабильность меня поразила, хотя скорее это субъективное впечатление после вертолета V912. А еще меня поразило полное отсутствие вибраций, эффекта желе на видео вообще нет, картинка выходит очень плавная. Как то странно, ведь на ютубе у всех все в желе.
Одностороння к сожалению. Ет уже нужно ставить чтото типа тогоже NRF24L01 в квадрик пульт, но оно на 2,4 ГГц работает как и квадрик, может забивать канал, темболее непонятко как квадрики выбирает несущюю частоту для передачи.
Самое простое для извещения мигать теми же светодиодами, а при потери связи пищать чтоб в огороде можно найти было.
да, вот покопался и нашел что сима наша работает на протоколе SymaX с приемо-передатчиком китайским клоном NRF24L01 )
docs.google.com/a/playtoday.ru/spreadsheet/ccc?key…
Вот тут люди все уже раскопали) и все схемы этой “китайской” капли до боли напоминающей что в симе) то есть осталось просто в их протокол добавить нашу команду )
…blogspot.ru/…/more-toy-quadcopter-hacking.html
кстати, приемопередатчик то это! значит можно сделать двухстроннюю связь с пультом) и пищалочку о низком заряде вполне реально на пульт сделать. Самому приемопередатчику разумеется все равно что передавать… так что то что у нас всего 4 канала - это в прошивке МК зашито ) но ничего, это как раз дело поправимое!
ну все посоны отлетались
ща эту лавочку прикроют нафиг
news.rambler.ru/29611650/
Тарьтесь пока можно… а то щас приравняют к оружию массового поражения.
Человек с ником “Extremist” - публикует запись о возможном использовании коптеров в видео оружия.
Интересненько, интересненько 😃
Квадрокоптер шёл примерно 20 дней, я заказ делал как раз перед китайским новым годом.
Основная проблема не в уведомлении о низком разряде - при некотором опыте хорошо понимаешь степень разряда акка по поведению квадрика - он становится более вялым, начинается потеря высоты при маневрах на Н-режиме, больше газа требует для висения… Когда такое начинается, я просто не пускаю квадрик в дальние полеты - катаюсь в 10-20 метрах от себя и над безопасной поверхностью. Без проблем, в общем.
Основная проблема - поиски мелкоквадрика на местности (зимой в снегах, летом - в траве и кустарниках). нужна громкая пищалка на борту для поисков. Да хрен с ней, пусть пищит все время полета, если нужно.
Да хрен с ней, пусть пищит все время полета, если нужно.
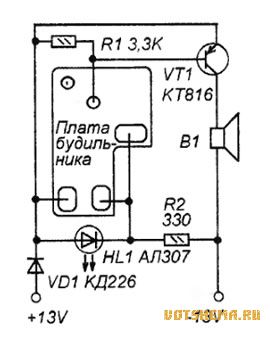
Для такого модинга много ума не надо. Берем китайский кварцевый будильник за 100р, выковыривываем из него противную пипикалку и засовываем в квадрик. Как она пищит все знают не по наслышке, пробивает пару этажей в хрущевках ))
UPD: Во, вот такой

тут видна эта схемка, вес у нее не более 2г.
Берем китайский кварцевый будильник за 100р, выковыривываем из него противную пипикалку и засовываем в квадрик. Как она пищит все знают не по наслышке, пробивает пару этажей в хрущевках ))
Зашибись! остается сделать ключик, который запитает пищалку при отсутствии подачи напряжения на двигатели. Я ни разу не электронщик, но как электрик, я бы поставил реле с нормально замкнутыми контактами)
Получится: летаем - не пищим, не летам - пищим.
То то и оно, что эта пищалка проест весь мозг если будет пищать непрерывно, а паять еще контроллер для нее не выгодно.
Хотя бегло глянув что творят из этих будильников самодельщики, похоже достаточно добавить еще пару деталей и все будет работать.
Вот пример использования такой платы

Вот вариант с усилителем аля сирена
Тогда как я и говорил, поставить герконовое реле. Геркон, само собой, нормально замкнутый (или переключающий, их легче найти вроде). Вот и вся схема управления. Пока ток идет на двигатель (через обмотку реле параллельно), контакты разомкнуты, а когда тока нет, включается пищалка. Герконовые реле есть на 3 и даже меньше вольт. Нужно будет померить напряжение, которое выдает плата на двигатель при малом газу.
Или такие релюшки: ay.by/…/malogabaritnye-rele-na-3-volta-3vdc-i-5-vo…
Можно поиграться с резисторами (не мудрствуя лукаво), чтобы 3-вольтовая релюха отключалась на 3,4 вольта, например. И все, задача решена.
То то и оно, что эта пищалка проест весь мозг если будет пищать непрерывно, а паять еще контроллер для нее не выгодно.
Хотя бегло глянув что творят из этих будильников самодельщики, похоже достаточно добавить еще пару деталей и все будет работать.
Вот пример использования такой платы
предлагаю HCM1203X PBF
www.platan.ru/cgi-bin/qwery.pl/id=32194
вот такой зуммер, встроенный генератор (это то что в платке из будильника), работает от 3х вольт - то что надо, звук 85дб - будет громко! Схемку можно на транзисторе, достаточно сделать логическое НЕ на транзисторе) этого вполне достаточно для пищалки! я хочу на МК сделать потому что хочу еще полетные данные писать на флешку ) ну и + если удастся к бортовому передатчику подключиться, сделаю вольтметр (или пищалку) прям в пульте )