FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

Правильно ли я понял, что мне нужно это еще купить для подключения? Что бы не трогать приемник.
Или только это?
Хотя, потратить 12 баксов и быть спокойным что будет работать точно тоже вариант. Надеюсь я правильно понял, так как фотки с таким устройством я видел.
З.Ы. таранис я не куплю, потому что свою апу за нормальные деньги не продам)
Спасибо всем)
Правильно ли я понял, что мне нужно это еще купить для подключения? Что бы не трогать приемник.
Или только это?
Хотя, потратить 12 баксов и быть спокойным что будет работать точно тоже вариант. Надеюсь я правильно понял, так как фотки с таким устройством я видел.
З.Ы. таранис я не куплю, потому что свою апу за нормальные деньги не продам)
Спасибо всем)
Проще самому сделать чем платить 4$
Запилил видеообзорчик на супербюджетные таротовские 2204-2300 моторы в дневнике у меня rcopen.com/blogs/14032/21108
Ещё одна вариация на тему наклона моторов
Нашёл ещё один сайт сюрвелзона , при первом заказе есть скидка 5$ ,доставка не бесплатная,как на сюрвелзон,НО при стоимости в 2$ пишет,что доставка 10-15 дней,проверить это пока не успел.
Инфа о том,что это сайт сюрвелзона,от самого сюрвелзона
Интересно вот такой наклон винтов как-то влияет на управление?
ru.aliexpress.com/item/…/32433146979.html
Ага… делает его невменяемым и малоинформативным.
Помимо этого подобная схема в принципе неэффективна т.к. приличная часть энергии тратится на взаимную компенсацию тяги моторов в сторону и как результат значительное уменьшение времени полета. Не говоря уже про то, что конструкция одноразовая…
В тему наклона и проставок - проставки без наклона существуют? Есть пока неосознанное желание поднять задние пропы сантиметра на два-три, кажется мне что в плоской схеме они сильно передними затенены на малых углах наклона самого аппарата…
Купил на али fatshark антенны (www.aliexpress.com/snapshot/6976515915.html?orderI…), оказались поддельными. Выглядят похоже, но материалы и обработка отличаются от оригинала. Открыл диспут и отжал 17 евро из заплаченных 23-х. После обострения диспута продавец должен был в течение трёх дней предоставить доказательства, что он не сделал и диспут решился в мою пользу. Я предоставил фотографии с оригинальной и поддельной антеннами и письмо от ImmersionRC, в котором они подтверждают отличие этих антенн от оригинала.
Status of case: Complaint Closed
Refund amount: EUR 17.00 (without returning goods)
Reason: seller didn’t provide required evidence to prove the product is **** original.
У них ещё и фото антенн не с их магаза 😃
Здравствуйте коллеги собррал квадрик Mini 250 FPV Quadcopter Frame x1
- ESC Connection Board x1
- MT1806 2280kv Brushless Motor x4
- 12A Simonk ESC x4
- 5030 Propeller CW&CCW x4
-CC3D Flight Controller…При полете отключаеца двигатель и он падает в чем причина.каждый двигатель и регулятор проверял отдельно работает без перебоев.Но когда настраивал каждый двигатель на программе open pilot последний двигатель набирал обороты почти в конце (проверял отдельно на стенде срегулятором напряжения набор оборотов было нормально увеличение и уминьшение). Не пойму в чем причина батарея была2200а-60с. Может контроллер?
При полете отключаеца двигатель и он падает в чем причина
Было то же самое ещё весной. В моём случае причина крылась в регуле (точнее в бэках этих регулей). Когда запитываешь CC3D и приёмник от бэка - он не справлялся. Отключался именно тот регуль, от которого запитывал всё хоз-во. Помогла установка отдельного бэка на 5V.
Было то же самое ещё весной. В моём случае причина крылась в регуле (точнее в бэках этих регулей). Когда запитываешь CC3D и приёмник от бэка - он не справлялся. Отключался именно тот регуль, от которого запитывал всё хоз-во. Помогла установка отдельного бэка на 5V.
Понятно Спасибо буду искать. ?какой он можете скинуть даные.
Купил на али fatshark антенны
Точно этот же товар брал по ссылке, тоже левые, но вроде хорошо работают в сравнении с просто сосисками.
В тему наклона и проставок - проставки без наклона существуют? Есть пока неосознанное желание поднять задние пропы сантиметра на два-три, кажется мне что в плоской схеме они сильно передними затенены на малых углах наклона самого аппарата…
Проставки обычно идут парой, клиновидные, и их можно положить одну на другую так чтобы они не создавали угла наклона.
Еще проставки без наклона можно сделать из сломанного луча, куска карбона, куска текстолита, куска пластика, в общем из чего угодно используя пару сверел.
Boris.B пишет что получает вопросы как настроить Idle Up на разных типах передатчиков. Он хочет заменить pid_at_min_throttle ( а это стабилизация коптера при минимальном для полета значении газа) настройкой IDLE UP, это упрощает все настройки и активируется переключателем Арминга.
При этом он рассматривает два варианта, первое это активация этой функции означает full PID loop active на всём ходе стиков, работает во всем диапазоне и всегда. В диапазоне zero throttle и min_check (это буферная зона ) ничего не происходит, это всегда min_check, такая схема ему нравится самому, она дает возможность Дизарм стиками и работает с функцией motor stop.
Второй вариант, тоже самое что и первый, отличие происходит масштабирование ( rescaled ) диапазон газа. 0 газа (это значение которое ниже min trottle) означает mincheck (это значение с которого начинается отсчет с нуля и выше до полного газа, то есть это полетный диапазон, в котором мы летаем). Это ему не очень нравиться из-за того, что есть прыжок в диапазоне газа который появляется в этой настройке, изменяется газ висения и исчезает возможность дизарма стиками.
Основная причина почему народ настраивает переключатель idle up на своих передатчиках это
из-за того, что при «чистом» pid_at_min_throttle не использует I term что не дает полной стабилизации коптера. Настройка pid_at_min_throttle сама по себе лишь убирает связь газа с нулем газа.
И самое главное из-за чего все задумано, эта опция убирает необходимость настройки свитча Idle Up на передатчике, для многих это головная боль, да и у Бориса есть желание избавится от этого таймера, в течение которого функция стабилизации работает (например 3 секунды pid_at_min_throttle = PID). Возможно эта функция уже появится на следующей неделе.
А можно попросить Бориса сделать возможность назначать на 5 или 6 выход мотора управление с 3 позиционного переключателя передатчика?
Тогда можно будет использовать Матековские платы ПДБ которые управляют включением света и пищалки с передатчика. Пока я так и не смог это сделать у себя. Пищалка и свет есть, но не используются.
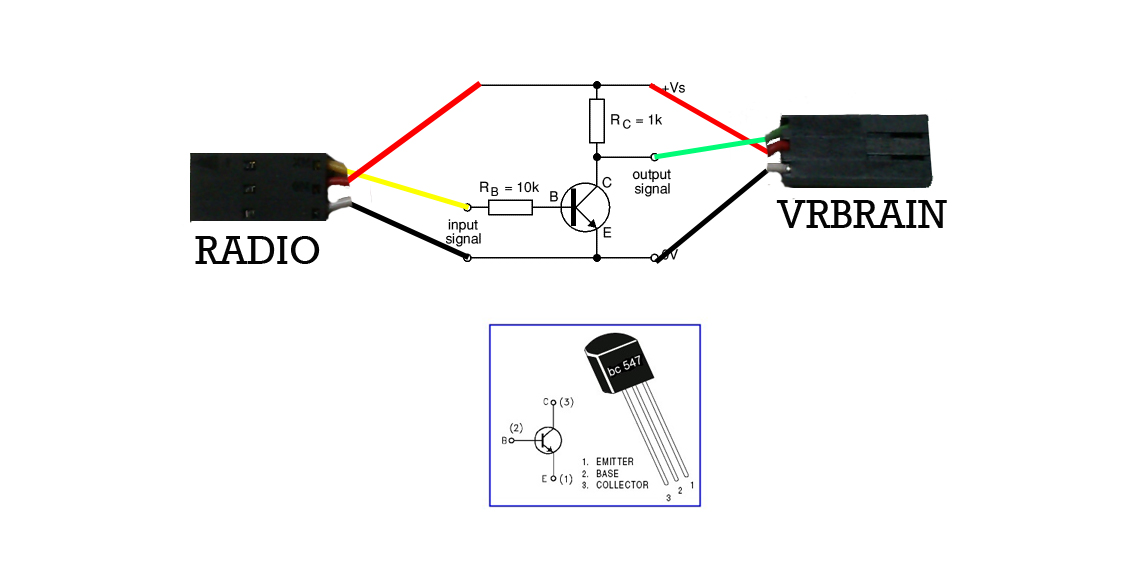
Можно просто запирающий транзистор или как там его на отдельный канал повесить…
А можно попросить Бориса сделать возможность назначать на 5 или 6 выход мотора управление с 3 позиционного переключателя передатчика?
Это не ко мне, его и так все просят. Новая полетная плата, чтобы продавалась- просьба портировать прошивку . Я все жду когда он от недостатка времени пошлет всех, ну или у него есть какой то интерес, иначе не могу объяснить его голого энтузиазма…
Я все жду когда он от недостатка времени пошлет всех, ну или у него есть какой то интерес, иначе не могу объяснить его голого энтузиазма…
В опенсорсных проектах очень увлекательно участвовать. А когда народ пользуется результатами твоего труда и благодарит, то это ещё и ужасно приятно.
А можно попросить Бориса сделать возможность назначать на 5 или 6 выход мотора управление с 3 позиционного переключателя передатчика?
Я пробовал включить channel forwarding (и вроде бы дополнительно активировал servo_tilt, точно не помню) на cc3d с betaflight. При этом два входных aux канала перенаправляются на первые два выхода, а моторы переезжают на 3-6. Вроде даже пищалка заработала на первом канале, но четвёртый мотор на шестом канале не заводился как следует. Первые три мотора работали нормально, а четвёртый только дёргался и не мог раскрутиться. Возоможно, это какой-то баг в поддержке железа CC3D, там на разных каналах разные таймеры используются.
В опенсорсных проектах очень увлекательно участвовать. А когда народ пользуется результатами твоего труда и благодарит, то это ещё и ужасно приятно.
off
Знаю,знаю… Когда то написал первое и единственное многостраничное пособие на русском по цифровому спутниковому телевидению когда это начиналось и было Вау ! Тогда Борисом был Uli из Германии, было много спасибо, но и много тех кто требовал часами им объяснять иначе козел…😁 Ох поцапался я тогда 😃
И к посту который выше о Борисе добавлю текст который был после этого, может не очень интересно, но один раз прочитать можно 😃
Используя один и тот же переключатель для “arming + idle up” делает disarming с помощью стиков невозможным. Режим «motor stop» меню становится невозможным когда switch активирован тоже ( то есть после включения двигатели вращаются ).
Возможность настраивать Idle Up на радиоаппаратуре сохраняется. Если выполняете длительные маневры в инверте (в перевернутом полете) или вам нужно в кратчайшее время потерять высоту теперь это можно делать на минимальном газе без опускания носа для пикирования или еще что то в этом роде, как это делается с pid_at_min_throttle Предыдущая версия с таймером это не самое лучшее решение и не может контролироваться пользователем (нет возможности контролировать секунды). Это приводит к крашам. Определенно это большое преимущество иметь этот параметр активным во время полета до тех пор, пока в этом есть необходимость.
“idle up” все же ограничивает значение min_check. Это не добавляет каких-то новых параметров, это только подменяет существующие.
PS По крайней мере когда этот параметр появится в настройкам мы уже будем в курсе что это и как работает.