FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

Сорри )) Не дюс, рцтаймер. Дюс я взвешивал ))

Вот это да, ребята на металле не экономят )) Минус грамм на провода, все равно 35 грамм
Да ппц тяжелые моторы, в итоге мой коптер на них вышел на 40 с копейками грамм тяжелее своего братца на кобрах.
Да ппц тяжелые моторы, в итоге мой коптер на них вышел на 40 с копейками грамм тяжелее своего братца на кобрах.
А ничего что 4 мотора в сумме дадут больший прирост в тяге чем эти 40 грамм? Конечно и батарейка пожираться будет быстрее, но если хочешь еще больше тяги - придется чем-то жертвовать.
А ничего что 4 мотора в сумме дадут больший прирост в тяге чем эти 40 грамм?
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Полностью согласен. Плюс к тому надо учитывать просадку аккума, красивые цифры в 1кг тяги с одного мотора малореальны. Даже если акк может отдать 80-100 ампер, он при этом просядет вольт до 14-15. А тяга в 1кг была на 15.8-16В
Компенсировать надо не вес, а тяговооруженность. Т.е. чтоб скомпенсировать 40г лишних и не потерять в динамике, надо не менее 250г тяги сверху.
Хорошо, а какой тогда вес идеал изначально, что бы не было “потерь в динамике”? Т.е. у человека выше коптер с кобрами, который весит на 40 грамм меньше уже изначально не потерял в динамике и будет летать намного лучше второго варианта? Пустая теория, имхо.
Плюс к тому надо учитывать просадку аккума, красивые цифры в 1кг тяги с одного мотора малореальны. Даже если акк может отдать 80-100 ампер, он при этом просядет вольт до 14-15. А тяга в 1кг была на 15.8-16В
Это все итак понятно. В реальном полете далеко не те цифры, что замеряют на стендах.
Не путаю, тест делал GoPro 4 - YI - RunCam2 А с учётом, что я занимают видео можно мне верить.
Классный тест. Да уж, ранкаму больше подходит место в сегменте $30-40. А что реально удивило, я всегда ставил Yi в такой ряд по качеству картинки, Gopro 3 -> Xiaomi -> Gopro 4 Black. Но посмотрев видео я заметил, что лучшая цветопередача, я бы даже сказал единственная правильная у Xiaomi. Кто не разбирается, просто посмотрите на асфальт (у гоупро он пурпурный) и на небо (у ранкама переконраст, перенасыщенность и не тот оттенок, а гоупро просто перенасыщенное). Ранкам2 со своим сверхмаленьким динамическим диапазоном снимает откровенный брак. А так хотелось бы, чтобы камера не стояла парусом поперёк потока воздуха.
----
Пока ехала вот такая платформа я собрал самоделку проще и легче. Оцените:
У кого-то есть опыт демпфирования? Стабильнее становится квад или нет? По идее, так мелкие вибрации фильтруются и контроллер не работает с этим шумом с акселерометра.
—
А ещё заметил, в режиме baro квад резко носит вверх-вниз, это из-за неприкрытого барометра? Чем это сделать - паролоном, ватой или чем-то получше? Какой толщины?
Попутный вопрос. Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте (также, как я это делал в Syma X5C), как мне эту поправку записать в контроллер коптера? Или может это неправильно настроен уровень? Так я калибровал акселерометр положив на коптер сверху строительный уровень.
Или может это неправильно настроен уровень?
может у вас стики не точно по центру?
Попутный вопрос. Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте
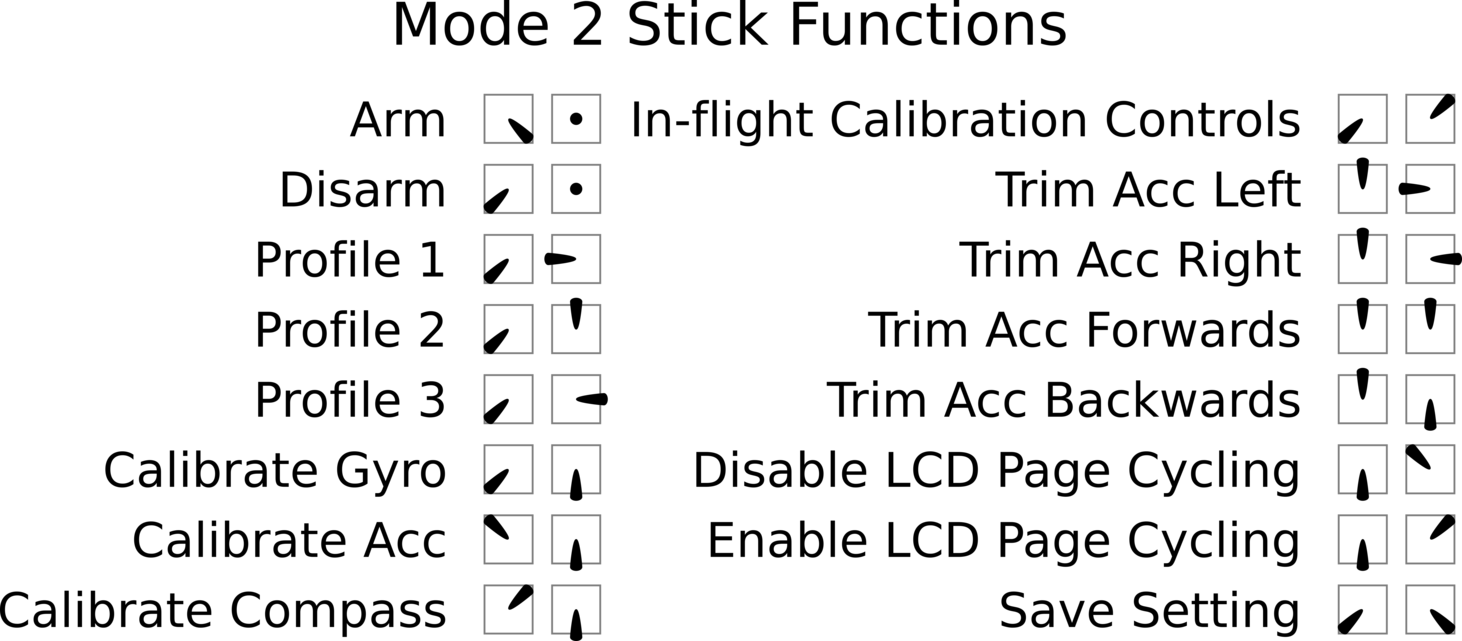
Триммируйте стиками, вот так:
Но лучше не занимайтесь ерундой, рейсер не фантом, он никогда не висит на месте и небольшой дрифт совершенно не критичен.
А так хотелось бы, чтобы камера не стояла парусом поперёк потока воздуха.
для мелких рам действительно камеры ГоПро формата располагаются компактно, а вот как раз Мобиус формата - торчать как бушприт 😃
У кого-то есть опыт демпфирования?
на мелких ВСЕГДА ВСЕ летают без демпфирования, на некоторых современных ПК были какие-то проблемы из-за вибраций и даже кому-то удалось улучшить поведение коптера используя демпферы, но IMO демпфирование ПК это ересь, коптер должен нормально стабилизироваться без него, если это не получается - значит или проблемы с датчиками в ПК или чрезмерные зашкаливающие вибрации у ВМГ
А ещё заметил, в режиме baro квад резко носит вверх-вниз, это из-за неприкрытого барометра?
отключи барометр и проблемы не будет 😉 он тут не нужен
Если при висении коптер без ветра ползёт в сторону и назад, я это устраняю с помощью трима на пульте
НИКОГДА не пользуйся тримами на пульте
в CF/BF по умолчанию диапазон управляющего сигнала от приемника должен быть 1000-2000 с центром 1500, добейся этого настройками аппы и больше никогда ни как не меняй
если коптер плывет не сильно - забей, в полете это не мешает и он и не должен висеть как прибитый
если сильно откалибруй аксель на ровной поверхности, если продолжает плыть подложи с этой стороны что-то тонкое под коптер и опять откалибруй - это общий подход
или как написал тигромух тримами акселя - это подход для CF/BF
Руслан, спасибо за информацию
но на будущее - ее лучше дублировать в текстовом виде, только тогда ее можно будет найти поиском:
Rctimer FR2205 вес с проводами и гайкой 36 гр
Пришел RedPawz RP-200 за 46 баксов с hobbyin.com, поругался я с ними за не правильные запчасти присланные в 1 заказае на Martian II … прислали футболку )))) в подарок XXXL, чутка велика и конечно запчасти которые в 1 заказе прислали не те.
Ну и раму эту взял новую, раз доставка бесплатная за их счет.
Давно хотел попробовать реальный X еще и с диким наклоном камеры. Да и сделана рама под HS1177 сразу, что радует.


Весит чудо 80г (рама), очень компактный и легкий получился даже в сборе, крепление башни конечно очень спорное… там фиг закрутишь гайку (плюс подложил шайбу, а то там прямо в карбон крутить зло…)… но с другой стороны видимо это удешевление. А по прочности, я думаю в 1 очередь будут уходить стойки… а потом уже все остальное. Низ 4мм карборн.
Управление с диким наклоном камеры прям вертикальный вертолет ))) вверх сложно летать, только вперед и быстро. Но в целом этого я и хотел, много видел у гонщиков таких форм-факторов. И да управлять после обычной 30-35" камеры… сложно, просто лететь вперед и облетать препятствия ОК, а вот сделать split-s скажем ух ))) YAW ваще не YAW.
GoPro приделал без проблем хомутами на башню, в целом даже на моторах FPVModel 2300kv летает интересно, но сорвал резьбу на 1 моторе… видео чуть позже будет.
P.S. В комплекте идут хомутики ))) и липучки для акб размера XXXXL походу, не понял зачем они там, можно весь коптер ими обернуть.
Еще фоточки тут imgur.com/a/XqrcL
народ требует краштестов ))
народ требует краштестов ))
Все будет, FPVModel сняли с продажи мои двигатели ((( … вроде нашел похожие проп-адпатеры… сижу жду.
Конечно надо сюда движки бодрые ставить и летать как вертикальный вертолет безумный, но бюджет он такой )))
Кстати если у кого есть опыт, где взять проп-адаптеры на FPVModel движки … я так понимаю это копия T-Motors была.
Пришел RedPawz RP-200 за 46 баксов с hobbyin.com
взлетный вес какой вышел? без гопро и акка
взлетный вес какой вышел? без гопро и акка
300г, это с Openlog он наверное 5-7г весит.
Naze 32, PDB matek, tbs антенка, dragonfly vtx, бузер, hs1177, пропы, липучка для АКБ )
Ну и 4 мотора FPVModel, я думаю они тяжеленные.
правильно ли я понимаю, что если при подключении USB (без аккума) питание появляется на пинах приемника, он включается, и тихо пищат движки - это не правильно?
чем это может грозить?
правильно ли я понимаю, что если при подключении USB (без аккума) питание появляется на пинах приемника, он включается, и тихо пищат движки - это не правильно?
чем это может грозить?
У меня нет питания на пинах приемника при подключении USB на SPRF3. На CC3D тоже не было.
правильно ли я понимаю, что если при подключении USB (без аккума) питание появляется на пинах приемника, он включается, и тихо пищат движки - это не правильно?
чем это может грозить?
такая же ситуация и у меня, тоже над этим задумывался.
По факту получается что с компа запитывается весь коптер, но ограничение у USB 500-700мА, как вариант может сгореть USB разъем, больше вроде ничем не грозит.
Главное не армить))) Компьютерный блок питания по +5в шине может отдать 30А(плюс -минус, в зависимости от блока питания), юсб выходы ограничивают резисторами…
Поправьте если неправ.