FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

сборшики гудлака забухали похоже
Не бойся и всё получится!
ПЫСЫ И это не шутка.
Так я чето не пойму куда гнуть. Растягивать в плоскости V или стараться как-бы отогнуть бока вперед назад?
Рама складная, в такой комплектации можно сложить спокойно передние и задние лучи внутри, и ничего друг другу мешать не будет
Так я чето не пойму куда гнуть. Растягивать в плоскости V или стараться как-бы отогнуть бока вперед назад?
В самой узкой части луча около моторки, вставляешь с одой стороны, а с другой оттягивая в натяг. Не бойся материал железобетонный. Не сломаешь.
Сегодня попробовал сделать ФЛИП…, что б его…
Лучше бы не пробовал 😦
Новая рама на ГЛБ
goodluckbuy.com/bx300-300mm-4-axis-carbon-fiber-fo…Интересная конструкция
Точно забухали …
Вот тут более подробно besthobbymall.com/…/transformation-300-quadcopter-…
Кстати про рамы из карбона/недокарбона. Сегодня ZMR_ка с Гудлака пришла (за 7 дней!), качество реза на 4ку, вес всех пластин 99гр, звонится вдоль, поперёк и по диагонали…
Так вот, сделал третий банк так сказать под флипы! Потому что если честно я не представляю, как вы летаете в том же бешеном режиме, что и делаете флипы!? Квадр реально не управляем, чуть влево, чуть в право, его ведет в сторону, почти мануал режим НАЗЫ от DJI!!! Летать в таком режиме вообще не представляю как можно!? Пиды для флипов я сделал такие, как Юлиан давал в видео инструкции! А в общем, без флипов летаю я с другими пидами (они у меня в дневнике), квадр летит не медленно, не кренится, маневреный, но флипы он не делает с такими пидами, как бы не нажимал на стик!!
Как я делал: взлетел повыше, будучи в очках, щелкнул на сумасшедший режим, дал правым стиком вперед, он резко перевернулся и стабилизировался вроде сразу, дал газу вверх и переключил на спокойный режим, что б не упасть, вроде нормально, но низко бы не прокатило! Так все и делают флипы, переключая туда сюда тумблер режимов полета???
А снял очки, думал дай попробую визуально, посмотрю как оно происходит! Все сделал так же и загудел! Его тупо в сторону повело и писец. Попрововал еще раз визуально, еще выше взлетел, снова крутанул, его повело, зарулился и грохнулся с метров 30! Антену в мусорку, пропы… Правда ветер был, но не сильный.
В общем капец, что делаю не так?
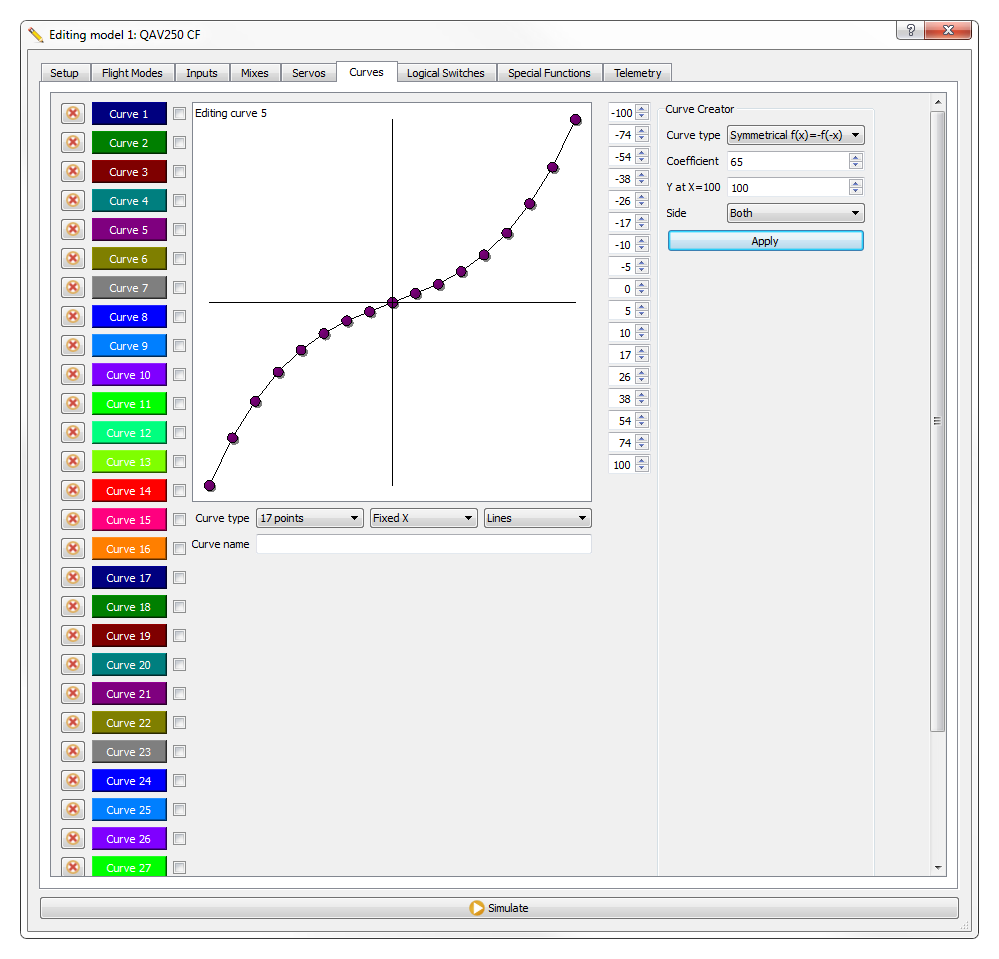
Экспоненту надо большую на pitch/roll чтобы можно было и плавно летать и флипы делать. В режиме rattitude ничего переключать не надо.
Экспоненту надо большую на pitch/roll чтобы можно было и плавно летать и флипы делать. В режиме rattitude ничего переключать не надо.
Сергей, будь добр подробнее… Сколько и где поставить?
Сергей, будь добр подробнее… Сколько и где поставить?
65%, например, в вашей аппаратуре.
В общем капец, что делаю не так?
Учиться и еще раз учиться…😃 Кстати мне неплохо помог симулятор.
Я вот, столбы ламаю, одни поля в округе.
На каком симуляторе тренировался, что неплохо помог? Я пробовал realflight у друга, уныло как-то и далеко от реальности. Хотя может модель была неправильная.
Продолжаю собирать свой первый квадрик ))
Сегодня спроектировал крепление для камеры. Камера крепится на двухсторонний скотч и сверху хомутиками на всякий случай. На раму сажается так-же на 2х сторонний скотч.
Работает все вот так. После сборки и проверки решения буду принимать заказы на изготовление чудо девайса )
Вопросик один. Камера у меня такая. Там в проводах, которые от нее идут какая-то платка вшита. Хочу провода укоротить и не пойму, можно ее удалить или нет ))
п.с спейсеры отлично сели на свои места. На бамперах светодиодная лента ))
п.с.с Еще вопрос.
В видео по настройке OpenPolit Юлиан выбирает X схему. Но ведь у нас H (расстояние между моторами по X и Y не равно). На что влияет выбор схемы при настройке контроллера?
Возьму пару тилтов!
Возьму пару тилтов!
В очередь! 😃 И постоянным клиентам скидка!
А по существу, Дмитрий, тогда придётся у каждого желающего модель камеры запрашивать и под неё деталюгу делать. Кстати тоже пантитл жду. Сегодня-завтра полностью мелкого переделывать буду под твои проставки. Фотки выложу.
На каком симуляторе тренировался, что неплохо помог? Я пробовал realflight у друга, уныло как-то и далеко от реальности. Хотя может модель была неправильная.
У меня realflight, модель подобрать без стабилизации, флипы и ролы уныло получаются, вообщем как то так.
Хочу провода укоротить и не пойму, можно ее удалить или нет ))
Там вшит стабилизатор напряжения. Можете выпаять провод, подать на него напряжение и на выходе замерить.
Продолжаю собирать свой первый квадрик ))
OpenPilot лучше боком развернуть, чтобы USB был с боку, настраивать удобнее будет. Только этот разворот надо в настройках потом отразить.
Опять же провода можно будет аккуратнее уложить.
Встану в очередь за пантилтом))
В видео по настройке OpenPolit Юлиан выбирает X схему. Но ведь у нас H (расстояние между моторами по X и Y не равно)
просто для справки: