FPV микрокоптеры на рамах от 100 до 200мм

надеюсь правильно Вас понял
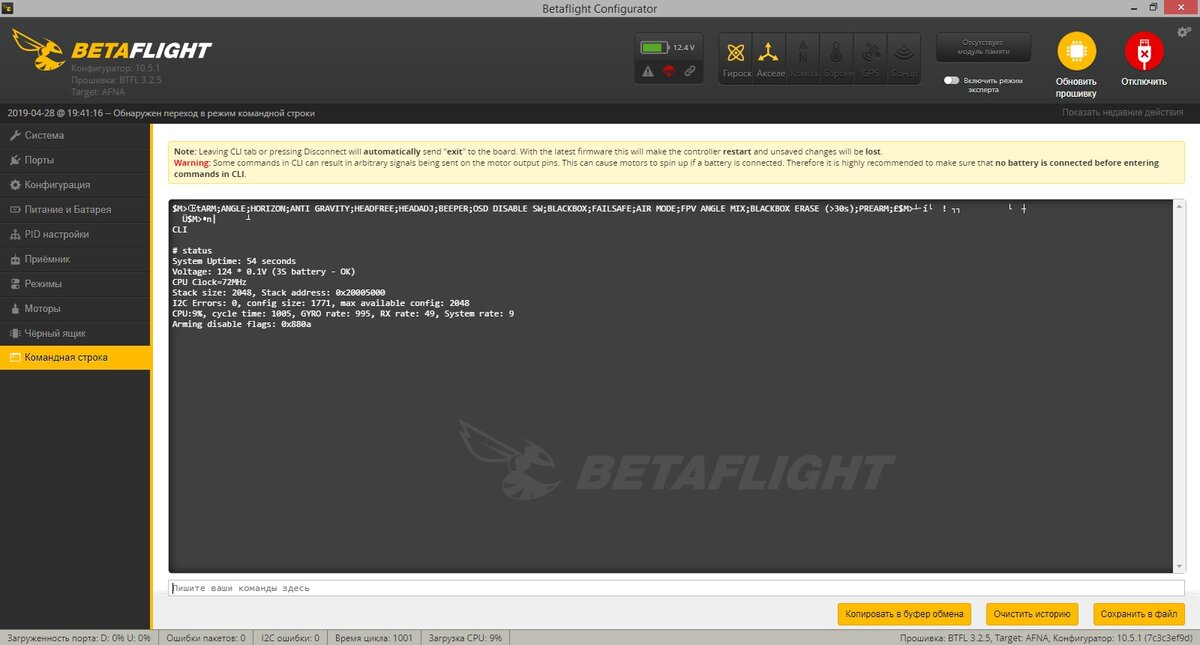
Да, правильно. Проблема, полагаю, в этом:
Arming disable flags: 0x880a
Вот только что это? Оно даже не гуглится…
Arming disable flags: 0x880a Вот только что это? Оно даже не гуглится…
В битовом виде это 1000100000001010
Каждый бит - какая-то причина.
Он должен эти биты расписывать текстовыми сообщениями, если у него при компиляции было задано наличие OSD или отсутствие минималистичного CLI.
Но в данном случае нет OSD и есть минималистичное CLI и он выводит просто маску.
В версии 3.2.5 соответствует FAILSAFE, BADRX, CLI, ARMSWITCH
Все верно, пока я раскопал тему - тезка успел раньше меня 😃
Ваша проблема: BAD_RX_RECOVERY (остальные флаги подтягиваются автоматом, по тем или иным причинам)
Далее по таблице ищем BAD RX и смотрим куда копать дальше.
Далее по таблице ищем BAD RX и смотрим куда копать дальше.
Вот что увидел в таблице:
BAD RX После срабатывания Failsafe приемник остался включеным 4 4 4 Выключите и включите питания к приемнику (дрону).
но как это поможет с моей проблемой. просто включение выключение дрона не помогает.
но как это поможет с моей проблемой. просто включение выключение дрона не помогает.
В Вашем случае никак не поможет. Читайте сноску (1) внизу. У Вас проблемы с радиотрактом, при низком уровне RSSI проскакивает failsafe. Почему - помехи, наводки по питанию, неисправность приемника/аппы.
Для начала проверьте антенну(ы) на приемнике (модель?), отключите FPV-передатчик на время тестов и уберите приемник подальше от регулей. Дальше варианты будут сложнее.
Для начала проверьте антенну(ы) на приемнике (модель?), отключите FPV-передатчик на время тестов и уберите приемник подальше от регулей. Дальше варианты будут сложнее.
Basiliocat, спасибо большущее за наводку. Убрал я приемник подальше от проводов регуляторов и все заработало, коптер стал послушным, все работает штатно, еще раз Спасибо большущее.
А так же все спасибо огромное, кто отозвался!!!
Но в данном случае нет OSD и есть минималистичное CLI и он выводит просто маску.
В версии 3.2.5 соответствует FAILSAFE, BADRX, CLI, ARMSWITCH
если не сложно, как Вы это расшифровали? мне на будущее.
С вашего позволения, похвастаюсь.
Этот малыш, вчера, привёз мне 4-е место, среди любителей, на открытом чемпионате Санкт-Петербурга по ДронРейсингу.
На равных бился с 5" собратьями и если бы не мои кривые дрожащие ручки мог бы претендовать и выше.
Вот кружочек из финального вылета.
Извините за качество, DVR + YouTube = адская смесь.
все заработало, коптер стал послушным, все работает штатно, еще раз Спасибо большущее.
Вот и хорошо, не за что 😃
По поводу расшифровки Arming disable flags. Скачиваем из архива исходники нужной прошивки /Source code (zip)/, ищем в src/main/fc/runtime_config.h по “ARMING_DISABLED”. Переводим в калькуляторе флаги из hex в bin, и ищем какие биты сработали.
Применимо к Вашему случаю: 100010000000 1 010 -> ARMING_DISABLED_BAD_RX_RECOVERY = (1 << 3) - побитовый сдвиг “1” на 3 бита влево, т.е. 4й бит = 1 (нумерация справа налево) и т.д. по аналогии.
Вчера была безветренная погода. Рискнул отлететь на 160 квадрике с пропами 4" на расстояние 4 км. На коптере стоят INAV 2.0.1, контроллер OMNIBUS F4 Corner Nano, моторчики 1306 3100kV, аккумулятор 3s 1300mAh, камера Caddx Turtle v2. Видеопередатчик на 5.8 ГГц с реальной мощностью около 300 мВт, Антенна клевер. Общий вес, с батареей, получился 255 г. Аппаратура - Taranis + R9M на мощности 100мВт, приёмник - Frsky R9 Mini. V-антенна - на коптере, обычный диполь с горизонтальной поляризацией - на передатчике. Управление потерялось на секунду только при развороте, на расстоянии 4 км, когда антенны расположились взаимно перпендикулярно. Запас по питанию ещё остался, следующий раз попробую слетать дальше. Здесь 2 видео, одно - HD, другое - с курсовой камеры со всеми цифрами.
другое - с курсовой камеры со всеми цифрами.
Эх, значит не у одного меня такая гадкая картинка с черепахи по аналоговому выходу. А накрутишь контраст - портится HD-картинка. 😦
111 мАч/км - великолепный результат для мультиротора, с таким расходом летают самолёты с размахом 1200+
А почему у вас на OSD нет RSSI? Чтобы заранее не волноваться? 😉 Просто интересно было бы ещё на его динамику посмотреть.
Эх, значит не у одного меня такая гадкая картинка с черепахи по аналоговому выходу. А накрутишь контраст - портится HD-картинка. 111 мАч/км - великолепный результат для мультиротора, с таким расходом летают самолёты с размахом 1200+ А почему у вас на OSD нет RSSI? Чтобы заранее не волноваться? Просто интересно было бы ещё на его динамику посмотреть.
В очках картинка выглядит значительно лучше. Портится при записи, получается светлее и строки более выражены.
Здесь стоит приёмник из самых первых R9 Mini, у меня не получилось снять с него RSSI.
В очках картинка выглядит значительно лучше.
Да я в курсе, но всё равно она с треском проигрывает картинке банальнейшего фоксира HS1177.
Портится при записи, получается светлее и строки более выражены.
“Квадратизация” на всех диагональных линиях и общее “замыливание” - это не от DVR, это сам исходник такой.
Здесь стоит приёмник из самых первых R9 Mini, у меня не получилось снять с него RSSI.
Он отдаёт RSSI по 16-му каналу SBus, как и все R9-приёмники
не получилось снять с него RSSI
Вообще, должно бы быть на нем RSSI.
Должно передаваться по каналу SBus.
Вот, может быть поможет:
Ну и вот:
Он отдаёт RSSI по 16-му каналу SBus, как и все R9-приёмники
Я пробовал, но ничего не вышло.
Если я правильно понял, Джошуа советует передавать RSSI по телеметрии. Но я принципиально её отключил на приёмнике и не пользуюсь, т.к. ещё один передатчик на маленьком коптере, с близко расположенной антенной GPS, принесёт больше вреда чем пользы.
Юлиан в своём видео говорит, что в этом приёмнике нет RSSI.
Из опыта своих полётов вижу, что практически всегда потеря сигнала происходит при взаимно перпендикулярном расположении диполей с горизонтальной поляризацией на коптере и передатчике. При полёте “блинчиком” предпочтительней вертикальная поляризация. К сожалению, не всегда есть возможность так разместить антенну на коптере.
Рискнул отлететь на 160 квадрике с пропами 4" на расстояние 4 км
Поздравляю! И снова поражаюсь чистоте картинки, особенно после разворота домой. У меня хватает максимум на километр, с сильными помехами уже на пределе, а при развороте пропадает совсем. Не пойму, что я делаю не так. Правда, я в очках до сих пор не удосужился полетать, может в них прием лучше, чем в Танго.
По расходу тока моторы ведут себя ожидаемо, а какие конкретно пропы стояли?
Поздравляю! И снова поражаюсь чистоте картинки, особенно после разворота домой. У меня хватает максимум на километр, с сильными помехами уже на пределе, а при развороте пропадает совсем. Не пойму, что я делаю не так. Правда, я в очках до сих пор не удосужился полетать, может в них прием лучше, чем в Танго. По расходу тока моторы ведут себя ожидаемо, а какие конкретно пропы стояли?
Спасибо, Андрей! Для хорошего приёма сигнала на 5.8 ГГц важны не только мощность передатчика и антенна на коптере. Важны условия приёма. Перед этим полётом, 2 недели назад, я стартовал практически с этого же места. Только забрался на верх дамбы, велосипед поставил около турникета, сам сел на откосе спиной к нему. Т.е. я сидел высоко, горизонт был открыт, антенны приёмные на очках, а за спиной металл в виде турникета вместе с велосипедом. Вроде бы хорошие условия. Но не тут то было. Взлетаю, картинка переодически снежит и падает до нуля. При повороте головы с антеннами, сигнал уходит. Прямая видимость с коптером не теряется. Сразу подумал, что спортился передатчик или антенна. Но поразмыслив, пришёл к выводу, что это происходит из-за “отражёнки” от железа у меня за спиной. Она складывается или вычитается с прямым сигналом. Отсюда и возникают проблемы с приёмом. Ничего не трогая, спустился вниз, в худшие условия приёма, но без железа. Велик положил на землю и сел подальше от него. Всё сразу наладилось. Результат на видео. 😃 Вывод: обращайте внимание на предметы, которые расположены рядом с вами!
Пропы эти.
Вывод: обращайте внимание на предметы, которые расположены рядом с вами!
Спасибо!
Пропы эти.
До таких пока не добрался, но должны быть неплохие по эффективности.
Среди моих лучшие пока Dalprop TriBlade 4045 V2 BN - www.dalprops.com/products/4045tri
С моторами 1306 3100кв на 11.1 вольт - 1.06 ампера на 70 грамм, 1.25 ампера на 80 грамм, это близко к вашим показаниям на OSD с учетом дополнительных потребителей. Может даже лучше.
Среди моих лучшие пока Dalprop TriBlade 4045 V2 BN - www.dalprops.com/products/4045tri С моторами 1306 3100кв на 11.1 вольт - 1.06 ампера на 70 грамм, 1.25 ампера на 80 грамм
Я мерял свои от источника 12 В, с мотором 1306 3100кв. Получилось 950мА на 66г и 1200мА на 83г.