Учимся у Берта Рутана

О-пять понеслась…
Как в бой вступает новая огневая точка, противник сразу дает ответ. “Пусть нас мало, но мы в тельняшках”. 😃 😛
Товарищи оппоненты, давайте лучше уточним предмет спора.
И не обсуждать крайности. А добить нашу несчастную утку.
Вы утверждаете:
- ПГО всегда дестабилизатор?
- В схеме “утка” ПГО это основное крыло, а заднее - стабилизатор?
- В продольной устойчивости утки преобладающий фактор - принцип флюгера?
Прошу кратко ответить -да, -нет. Без демагогии.
- ПГО всегда дестабилизатор?
- В схеме “утка” ПГО это основное крыло, а заднее - стабилизатор?
- В продольной устойчивости утки преобладающий фактор - принцип флюгера?
Прошу кратко ответить -да, -нет. Без демагогии.
- Да , на том и будем стоять
2)Нет основного крыла в схеме тандем или утка , ПГО с РВ несущее крыло с управлением по тангажу , крыло стабилизатор и управляется по крену ( если есть элевоны по крену и тангажу ) . - Да , как и в любой схеме моделей , где ЦТ впереди фокуса модели ( преобладают по эффективности больше стабилизирующие поверхности -чем дестабилизирующие ) .
Товарищи оппоненты, давайте лучше уточним предмет спора.
Давайте уточним цель спора. Вы хотите разобраться с критериями устойчивости схемы утка или переспорить оппонентов?
Спасибо.
Хочется дождаться ответа DrRinkes.
To GSL:
Скорей всего понять, не ошибаюсь ли я сам, как любитель, в этом вопросе.
А спорить не люблю.
😃
Да/нет никак неполучиться.
1.Всегда создает дестабилизирующий момент. И не только ПГО и не только на утке. Но дестабилизатором я бы не стал называть.
2.Оба создают свою часть подъемной силы, но заднее стабилизатор продольной устойчивости.
3.Не только преобладающий но единственный, могут отличаются только формулировки.
Пока по первому хочу уяснить.
1.Всегда создает дестабилизирующий момент. И не только ПГО и не только на утке.
Когда момент крыла пытается как бы повернуть крыло вверх(уменьшить угол атаки). В моем понимании дестабилизировать -
значит момент ПГО тоже будет пикирующим и еще больше усилит момент крыла. Я думаю ПГО будет сопротивляться, так как подъемная сила на нем останется положительной и момент ПГО кабрирующий будет направлен в противоположную сторону(создаст стабилизацию). На классике ведь так трактуют продольную устойчивость. Отличие только - ПГО и ГО на разных плечах находятся относительно оси поворота в ЦТ, и силаY ПГО положительная, а силаY ГО отрицательная.
И наоборот при уменьшении угла атаки подъемная сила на ПГО уменьшается, что опять противодействует стабилизирующему моменту на крыле.
пост#237
Уменьшение подьемной силы и момента ПГО дестабилизирующее, т.к. вес модели который должно нести ПГО (но в данный момент не несет), тянет ЛА в пикирование. Сила всё еще направлениа вверх, но её не достаточно. Вот это уменьшение подъемной силы и момента ПГО и является дестабилизирующим, сопротивляется восстановлению исходного положения. Но суммарный момент остается кабрирующим, т.к. стабилизирующий эффект основного крыла сильнее (если фокус позади ЦТ) и равновесие сохраняется.
Тема “Учимся у Рутана” превращается в “Научим Рутана!”. Ну, ну…
Нужно ли знать как это работает? В учебниках об этом пишут, это влияет на динамическую устойчивость связанную с инерцией масс при вращении ЛА.
Берт Рутан навряд ли сюда заглянет, Вы же не Берт Рутан?
Когда момент крыла пытается как бы повернуть крыло вверх(уменьшить угол атаки). В моем понимании дестабилизировать - значит момент ПГО тоже будет пикирующим и еще больше усилит момент крыла.
Что то тут запутано. Я думал, что случай с отклонением ПГО вверх на кабрирование, простой, т.к. добавочная подъемная сила ПГО явно увеличивает отклонение от состояния равновесия.
Принцип стабилизации ЛА любой схемы и с любыми аэродинамическими компонентами сводится к: а) равенству моментов аэродинамических сил с противоположными знаками; б) свойствам аэродинамических сил участвующих в стабилизации, НАРОСТАТЬ (УБЫВАТЬ) при изменении положения ЛА относительно направления движения. Другими словами, если тангаж увеличивается, то момент подъемной силы стабилизатора (для обычной схемы), момент подъемной силы крыла (для утки) растут интенсивнее, чем на передней поверхности (крыле или ПГО) при передней центровке. То же самое происходит при уменьшении тангажа. “Поворачивающие” моменты интенсивнее там где + Су*Lго больше. Т.е. Всегда имеет место саморегуляции оптимального положения ЛА за счет баланса моментов подъемной силы на плоскостях. В ЛА с задними центровками автостабилизация ,скорее, происходит из за быстро нарастающих срывных процессов на “задирающейся плоскости”. Аналогичные процессы происходят и на ЛК, но в пределах различных участков единной аэродинамической поверхности имеющей свойства самостабилизации.
P.S. Объязательно попрошу друзей общающихся с Рутаном, узнать его мнение о принципе устойчивости “уток”. И, для лучшего представления эффективности поверхностей “уток”, посмотрите на "Вояджер или “Солитар” Рутана или мускулолет Маккриди “Альбатрос” с относительно задней центровкой для схемы “утка” с цельноповоротным ПГО. Прямые крылья большого удлинения и классические ПГО с рулями высоты. Пишу, и одновременно просматриваю интересную книжку “Самолет своими руками” из которой узнал, что и у нас много приверженцев схемы “утка” и успешно летают не только копируя Рутана. “Пари”(Тверь) масса 246 кг; "Утки"РБ-15 и РБ-17(Шауляй) 305 кг; А-8(Самара) 223 кг; Трехкрылый “Пегас” и др.
Почему-бы американцам не сделать классику , а именно утку , да просто ПАТЕНТ нужен был на новую схему , чтобы никто не оспорил .
Они тупо развернули самолёт хвостом вперёд и развернули винт . Кстати первый самолёт у них был не Флайер-1 , а с килями впереди (как у бразильца) .
Потому что Райты предполагали, что передняя управляемая плоскость предотвратит затягивание в пикирование. Их впечатлила катастрофа Лилиенталя. При это они первоначально считали наличие ВО необязательным. Просто тогда еще многого не знали, Вы же сами сказали.
Несмотря на то, что: “Принцип придания самолёту продольной статической устойчивости с помощью горизонтального оперения, включая установку горизонтального оперения на отрицательный (по отношению к плоскости крыла) угол, был описан Джорджем Кейли в 1852 году. Пено, по мнению некоторых исследователей, повторно открыл это принцип независимо от Кейли. Кроме того, заслуга Пено состоит в теоретическом обосновании этого принципа с применением математики”. Кроме этого уже были работы Неждановского и Ленгли, но была проблема обмена информацией.
Основное достижение Райтов в том, что они первыми “…находят приемлемое решение проблемы поперечной устойчивости планера, сделав приспособление для перекашивания задней кромки на концах крыльев, которое позволило намного улучшить устойчивость машины в полете.”
Основное достижение Райтов в том, что они первыми “…находят приемлемое решение проблемы поперечной устойчивости планера, сделав приспособление для перекашивания задней кромки на концах крыльев, которое позволило намного улучшить устойчивость машины в полете.”
Собственно это пожалуй единственное что они действительно изобрели.
А еще они очень удачную винтомоторную установку сделали. Два больших винта с приводом через понижающий редуктор обеспечили хороший КПД при малой скорости. Поэтому даже со слабым движком Райты хорошо летали. В Европе к 40 сильному движку прицепляли лопатки на палочках и они больше молотили воздух чем создавали тягу.


А еще они очень удачную винтомоторную установку сделали.
Да их научный подход в проектировании профилей и воздушного винта удивляет, и это несмотря на отсутствие у них профильного образования.
Основное достижение Райтов в том, что они первыми “…находят приемлемое решение проблемы поперечной устойчивости планера, сделав приспособление для перекашивания задней кромки на концах крыльев, которое позволило намного улучшить устойчивость машины в полете.”
Забыл я про еще один момент с которым столкнулись Райты, поворачивание в сторону противоположную крену. Это очень важный момент без решения этой проблемы невозможно управлять ЛА. “В первый раз в истории, подвижной вертикальный руль применялся для направления или устойчивости летательной машины. В первый раз также подвижной вертикальный руль в соединении с крыльями, подставляемыми под различными углами атаки, применялся для управления устойчивостью и движением летящего аэроплана.” книга М.Зенкевич “Братья Райт”.
Ну и ко всему, Райты интуитивно почувствовали значение удлиннения крыла и лопастей винта (или сделали такой вывод из своих аэродинамических экспериментов). Так, что то, что нам сейчас кажется простым, состояло в решении множества сложных вопросов, ответы на которые и созрели к 17 декабря 1903 года.
движку прицепляли лопатки на палочках и они больше молотили воздух
Аха… А гляньте на СОВРЕМЕННЫЙ ПРОПЕЛЛЕР ТАЙМЕРНОЙ МОДЕЛИ…
Аха… А гляньте на СОВРЕМЕННЫЙ ПРОПЕЛЛЕР ТАЙМЕРНОЙ МОДЕЛИ…
Чем удивить хотите? Тем что у несомненного многолетнего законодателя мод в классе F1C Евгения Вербицкого как и у Райтов стоит редуктор и винт большого диаметра 😒
Потому что Райты предполагали, что передняя управляемая плоскость предотвратит затягивание в пикирование. Их впечатлила катастрофа Лилиенталя. При это они первоначально считали наличие ВО необязательным.
Судя по этому рисунку они сначала не считали обязательным и продольную устойчивость ( стабилизатор ).

на Флайере -1 только крылья имеют подъёмную силу , ПГО только в роли РВ ( не несущее ПГО) .
Пилот сидел за фокусом самолёта , скорей всего в районе ЦД крыла .
Верхнее ПГО и верхнее крыло почти не работаю , в основном для жёсткости конструкции ( коробка) .
Мне кажется у них получился не самолёт , а экраноплан .
В подъёмная сила в основном в высоком давление под нижней поверхность нижнего крыла и малость работает верхняя поверхность верхнего крыла ( низкое давление) .
Думаю у них цель была не полететь как на самолёте , а хотя-бы пролететь над землёй , для полёта на экране вполне хватало тяги ВМГ .Им только не хватало тяги для взлёта , вот они и придумали использовать катапульту .
Тогда как же он мог летать когда отрывался от “экрана” , думаю для выравнивания горизонтального положения как раз помогал ПГО поворот с отрицательным углом атаки , вот так они и “ловили” продольную стабилизацию . Но они вроде потом додумались прилепить настоящий стабилизатор за крылом и получился продольный триплан .
Кстати этот планер тоже можно назвать с большой натяжкой . Скорее это планер -слопер .😃

Сильно не пинайте , просто мыслив слух 😃
Копните поглубже вот на этом ресурсе.
Аэродинамическая схема: “утка”.
Самолёт П-6М2 будет двухместным, с несущим центропланом, с крылом большой стреловидности и среднего удлинения, будет оснащенн несущим ПГО (неподвижный горизонтальный стабилизатор и руль высоты).
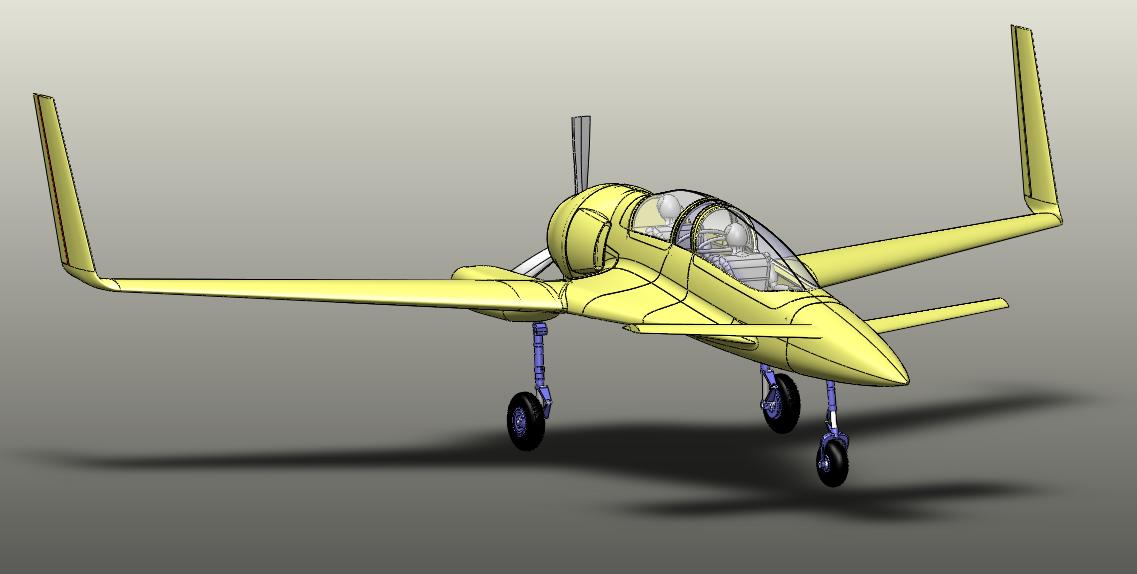
Самолет будет оснащен убирающимся по ходу движения трехопорным шасси с носовой стойкой.
Обратите внимание на “бесграмотные” термины “СТАБИЛИЗАТОР и РУЛЬ ВЫСОТЫ” 😉
Судя по этому рисунку они сначала не считали обязательным и продольную устойчивость ( стабилизатор ).
Тем не менее ГО на рисунке отчетливо видно, и это СТАБИЛИЗАТОР!
на Флайере -1 только крылья имеют подъёмную силу , ПГО только в роли РВ ( не несущее ПГО) .
Пилот сидел за фокусом самолёта , скорей всего в районе ЦД крыла .
Верхнее ПГО и верхнее крыло почти не работаю , в основном для жёсткости конструкции ( коробка) .
Мне кажется у них получился не самолёт , а экраноплан .
В подъёмная сила в основном в высоком давление под нижней поверхность нижнего крыла и малость работает верхняя поверхность верхнего крыла ( низкое давление) .
Думаю у них цель была не полететь как на самолёте , а хотя-бы пролететь над землёй , для полёта на экране вполне хватало тяги ВМГ .Им только не хватало тяги для взлёта , вот они и придумали использовать катапульту .
Тогда как же он мог летать когда отрывался от “экрана” , думаю для выравнивания горизонтального положения как раз помогал ПГО поворот с отрицательным углом атаки , вот так они и “ловили” продольную стабилизацию . Но они вроде потом додумались прилепить настоящий стабилизатор за крылом и получился продольный триплан .
Откуда столько предположений-утверждений, без единного датчика для подтверждения сказанного?
Слопер это=склон, скат, на сленге - модели для полетов в динамических потоках. На снимке, реальный балансирный планер. Именно такие помогали в понимании основных принципов аэродинамики и аэромеханики. Спасибо за качественные изображения!
Обратите внимание на “бесграмотные” термины “СТАБИЛИЗАТОР и РУЛЬ ВЫСОТЫ”
Да , стабилизатор и РВ и все довольны , но это ещё они не знают нас с Сергеем , мы-бы им вкрутили мозг ( чтобы начинал думать , а не повторять рефлекторно зазубренное )😃 .
Откуда столько предположений утверждений, без единного датчика для подтверждения сказанного?
Воображение развито 😃.
Слопер это=склон, скат, на сленге - модели для полетов в динамических потоках.
Ну да , ветерок по склону снизу -вверх , представляете какой там угол атаки получается , типа дельтаплан , только три крыла 😃.