SmartBird Festo и другие

Разберемся во всех подробностях как оно устроено, летает и как его усовершенствовать и построить в домашних условиях.
А что тут разбираться. На сайте Фесто куча фотографий и видео для копирования. Механика полета птицы в инете лежат научные статьи и книги. За рубежом по моим подсчетам уже трое сделали аналоги Фесто видео то же в инете.
Усовершенствовать - зачем изобретать колесо ,лучше и проще чем Фесто вряд ли можно что то придумать для того что бы построить и летать и получать удовольствие.
Проблема в другом в копирование и заставить крыло делать полный взмах и хлопок (ход крыла в низ).
Электроника схемы да то же в инете можно найти .Другое дело подогнать под себя и изменить программное обеспечение их.
Вот точная копия
У меня уже на половину готовые чертежи и схемы ,да же макет крыла.Но заставить крыло махать как положе вот тут то и загвоздка.
А что тут разбираться.
Я как бы раньше этой темой не интересовался, по этому приходится разбираться.
заставить крыло делать полный взмах
Вот то то и оно, что кинематика здесь не идеальная, крыло в плече начинает опускаться когда еще “кисть” не дошла до конца вверх. Ход в “плече” только 45градусов. Привод не обязательно копировать, по моему чем исправлять ошибки лучше сделать всё заново.
заставить крыло махать как положе вот тут то и загвоздка.
Выбросить привод “кисти” от кривошипа крыла и сделать для этого отдельный привод.
инете лежат научные статьи и книги.
Поделитесь списком если не сложно.
Ход в “плече” только 45градусов.
Вообще то 35*-40* в верх и 10* вниз.Книги Виноградов ИН аэродинамика птиц парителей .Васильев ГС Основы полета моделий с машущим крылом.Статья была Почему птицы летают и Теория полета птиц. Где они были в инете не помню ссылок нет.Да просто в поисковике забить Теория полета птиц и смотреть что вылезет.Достаточно понять движение крыла и центровки птицы.
Редуктор там нормальный. Вся проблема или в кисте или в шатуне.
крыло в плече начинает опускаться когда еще “кисть” не дошла до конца вверх.
Да именно так. Что они там замутили я так и не понял ,хотя у них плечо выгибается чуть ли не дугой. На макете пробовал по разному ,не выходит.Хотя у парня на видео это получилось.
Выбросить привод “кисти” от кривошипа крыла и сделать для этого отдельный привод.
Это усложнит редуктор а так же это может отразиться на весе птички. К стате если не ошибаюсь у них она весит порядка 470грамм(полетный вес).
Меня интересует какой моторчик ставить (обороты-мощность).Акк где то 1000Ач минут на 5 хватит.
Меня интересует какой моторчик ставить (обороты-мощность).
Сколько зубъев на главных шестеренках? Моторчик скорее всего нужно 350kv на двух банках.
Я вот смотрю в сторону червячного редуктора из стеклоподъемников или “дворников”, очень высокая прочность при небольшом весе если корпус выбросить.
смотрю в сторону червячного редуктора
Нееее.Я делаю как у Фесто,все уже подобрано.Мотор я прикинул ставить из серии 2822-2826 /где то 900-950KV и мощностью 200-240W(если китайцы не врут.А пока подбираю что лучше),акк на три банки.Стенки редуктора буду даль из сандвич панелей( 2слоя 1мм фанера и три слоя рогожа угля)думаю миллиметра 3-4 стенку получу.ну все остальное то же уголь.Думаю в полетный вес в грамм 500 уложиться,при размахе крыла 2м. Сейчас пока танцы с бубнов вокруг крыла . К с тате знакомых нет кто мог отредактировать программу для пик контролера ,и вообще в электронике разбирается.
К с тате знакомых нет кто мог отредактировать программу для пик контролера
К сожалению нет.
Так какой там редуктор и основные шестерни на SmartBird? А то скорость маха(скорость моторчика/редуктор) с углом установки профиля непосредственно связана. Если “неправильно” махать, то никакого эффекта не будет. Это и есть основная проблема махолетов, насколько я понимаю, нет тяги если режим работы крыла в точности не соответствует скорости полета. Это как неправильный шаг на воздушном винте, или большой шаг - перегрузка мотора - нет тяги, или малый шаг - недогрузка мотора - нет скорости потока, на рабочей скорости опять нет тяги.
Совместить контроллер с датчиком воздушной скорости конечно было бы идеально, иначе махолет это однорежимный аппарат.
Заморочился посчитать угол установки крыла при взмахе для небольшой модели. Если взять скорость полета 10м/сек и взмах за 0,2сек примерно на 0,2м = 1м/сек в середине (маленькая метровая модель), 2м/сек на конце. То нулевой угол атаки в середине -6 градусов, рабочий -2 градуса (угол атаки 4). на конце -12 градусов, рабочий -2 градуса (угол атаки 10). При отсутствии крутки. Короче чёрт ногу сломит 😃.
Эко тебя торкнуло…Рассматривай полет птицы как полет планера,только для взлета используется взмах крыла. Винт выталкивает поток воздуха назад вдоль самоля создавая тягу , а взмах крыла под себя направляет поток воздуха,создавая вертикальную тягу. Грубо говоря так. А угол атаки установки крыла думаю делать в +2*,больше не имеет смысла. Главную роль играет правильная амплитуда взмаха крыла. Правда полную амплитуду как у птиц повторить сложно ,очень сложные узлы сочленения в крыле будут,пока не хочется этим заморачиваться.Тем более летит с половиной амплитуды.
Во, хочешь мозги заморочить посмотри в личку кинул ссылку на книгу пароль в личке.правда там одни скупые расчеты.
vitanar.narod.ru/autors/…/toropovvlad.htm вот статейка посмотри
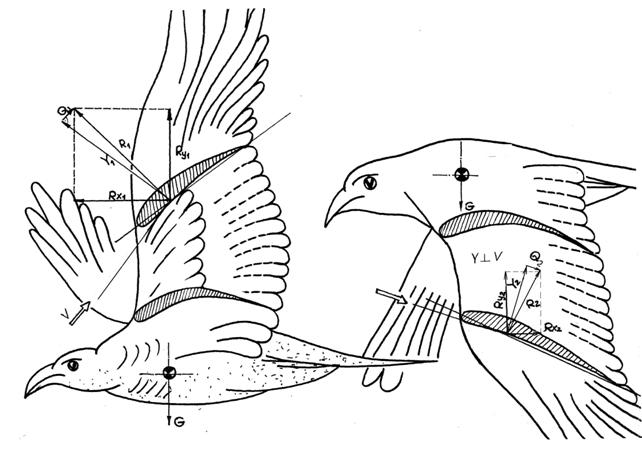
при опускании крыла при подъёме крыла
Схема сил махолёта
Спасибо, хоть я в сверхестественное не верю (про эфироиды:)), но почитаю (сказка ложь да в ней намек).
Интересная история от Владимира Торопова.
Углом атаки крыла управлял специальный пружинный механизм. Затем я стал управлять рукой – стало лучше. Создавалось впечатление, что крылья нуждаются не столько в силе, сколько в правильном управлении.
А что Владимир Торопов не запатентовал еще способ извлекать бесплатную энергию из воздуха? Раскачать упругое крыло крутильно-элеронным флаттером и забирать часть энергии на тягу.
Но дело в том что флаттер это не бесплатное мероприятие, он берет энергию из воздуха тормозя крыло.
Хотя есть заявка “крылья мускульного махолета с резонансным приводом (заявка ******* Булычева М.Г.от 21.01.1988 г.”
В этом здравая мысль в том, что без пружинного аккумулятора энергии махов, требуется в два раза больше затрат этой энергии на машущий полёт.
Птицы и насекомые об этом знают и накапливают энегрию в растягивающихся машцах. Но в Festo SmartBird такого нет, не такая уж и умная эта птичка 😃.
Но в Festo SmartBird такого нет, не такая уж и умная эта птичка .
Они пошли по простому принципу ,и они использовали геометрию движения крыла ,и в этом плюс. Если бы они хотели сделать мускульную систему они бы сделали но это было бы очень тяжелый аппарат. А механические руки -ноги с использованием мускул они уже повторили сделав роботов человека и животных.
По этому нам не следует то же заворачиваться какими то не понятными разработками других,хотя они выглядят интересно.
Что у тебя с амплитудой маха или делаешь другой редуктор. Я уже пробовал менять геометрию шатуна ,добавлять дополнительные элементы ,но пока без результата.Математически рассчитать с помощью тригеометрии или механики не знаю не селен.,можно ли.
В данный момент, собираю метровую (1100мм, 250гр) птичку без управления углом атаки, с приводом только на “кисти”. По результатам, потом буду думать, как и что делать дальше (из чего делать скелет крыльев и т.д.).
они использовали геометрию движения крыла ,и в этом плюс
Че то я ничего таково у них не вижу 😃
Че то я ничего таково у них не вижу
Ну как же ,идет полный взмах и изгиб крыла в нескольких точках,правда опускается вниз только до 10*,хотя полное опускание должно быть до -15*, но при этом они учли в ВМ изменяют угол и НМ точке крыло делает как бы гребок(как весло),что повторяет естественное движение крыла… У других моделях которые существуют крылья просто нервно дергаются туда-сюда.
Я делаю все и сразу,по этому нужен помощник компьютерщик. Я буду использовать карбон ,поскольку удалось достать, и будет денежка на крылья то же куплю трубочки. А так я видел модель где узлы клеились из стеклоткани.
Вот, что успел сделать за пару дней - скелет движителя, осталась обтяжка. Подвижное крепление на оси с загрузкой торсионной пружинкой из сварочной проволоки на полуавтомат. Загрузка немного слабее “расчетной” с возможностью укорачивать пружинку и увеличиавть жесткость поворота на оси. Стандартные сервы в качестве привода. Сколько протянут неизвестно, надеюсь на несколько полетов хватит 😃
М-да,боюсь что не потянет,маленькая скорость у них для маха.Не , не то ,да и крыло плоское.Получиться обыкновенны вжик…
Да скорость маловатая? Три взмаха в секунду на 60 градусов, у голубя в два раза меньше размером 5 взмахов. Почти нормально.
А потянет не потянет это вопрос мощности сервомашинок? Нужно примерно 8 ватт мощности - почти хватает.
В программе Профили нашел подходящий профиль .Делаю шаблоны,вырежу и пенопласта заготовку профиля и по ней из бальзы буду выклкеивать нервюры.Поверх потом каждую усилю карбоновым волокном.То же потихоньку тронулся с места.Слушай ,а хвост какой формы планируешь.Я наверно все таки сделаю V образный и направить V вниз, или просто плоский?
хвост какой формы планируешь
Продольная устойчивость здесь конечно плохая, но это самая маленькая из проблем 😃. Я выкладывал картинки, хочу сделать как можно больше похоже на живую чайку. Если с V, то “красивше” наоборот в виде буквы Л. А руль направления в виде лап снизу.
Я вот посмотрел червячные редукторы стеклоподъемников. Рабочая нагрузка 2 Ньютона на метр, это с запасом - т.е. в 3 раза больше чем будет. Преимущество отсутствие шума, а то жужащих птиц в природе не бывает. Набросал в карандаше кинематику, лучше чем на Festo всё равно не придумать, но если сделать отдельный привод “кисти” и другие усовершенствования на которых они сэкономили вес, то можно выиграть за счет большого маха крыла. Буду закладывать 80* полностью рабочего маха без “обмана” (но с возможностью перенастройки “на земле”).
Да читал такое. Инж.Тихонравов М.К. 1937год.
Вот чего можно получить простыми методами.
Вот еще продвинутая птичка от Robert Musters а.
www.youtube.com/watch?v=bF6eAmzse8c
Вот парень, то же не заморачиваясь, взял две мощные сервы и оно даже полетело.😃