SmartBird Festo и другие

смотрю в сторону червячного редуктора
Нееее.Я делаю как у Фесто,все уже подобрано.Мотор я прикинул ставить из серии 2822-2826 /где то 900-950KV и мощностью 200-240W(если китайцы не врут.А пока подбираю что лучше),акк на три банки.Стенки редуктора буду даль из сандвич панелей( 2слоя 1мм фанера и три слоя рогожа угля)думаю миллиметра 3-4 стенку получу.ну все остальное то же уголь.Думаю в полетный вес в грамм 500 уложиться,при размахе крыла 2м. Сейчас пока танцы с бубнов вокруг крыла . К с тате знакомых нет кто мог отредактировать программу для пик контролера ,и вообще в электронике разбирается.
К с тате знакомых нет кто мог отредактировать программу для пик контролера
К сожалению нет.
Так какой там редуктор и основные шестерни на SmartBird? А то скорость маха(скорость моторчика/редуктор) с углом установки профиля непосредственно связана. Если “неправильно” махать, то никакого эффекта не будет. Это и есть основная проблема махолетов, насколько я понимаю, нет тяги если режим работы крыла в точности не соответствует скорости полета. Это как неправильный шаг на воздушном винте, или большой шаг - перегрузка мотора - нет тяги, или малый шаг - недогрузка мотора - нет скорости потока, на рабочей скорости опять нет тяги.
Совместить контроллер с датчиком воздушной скорости конечно было бы идеально, иначе махолет это однорежимный аппарат.
Заморочился посчитать угол установки крыла при взмахе для небольшой модели. Если взять скорость полета 10м/сек и взмах за 0,2сек примерно на 0,2м = 1м/сек в середине (маленькая метровая модель), 2м/сек на конце. То нулевой угол атаки в середине -6 градусов, рабочий -2 градуса (угол атаки 4). на конце -12 градусов, рабочий -2 градуса (угол атаки 10). При отсутствии крутки. Короче чёрт ногу сломит 😃.
Эко тебя торкнуло…Рассматривай полет птицы как полет планера,только для взлета используется взмах крыла. Винт выталкивает поток воздуха назад вдоль самоля создавая тягу , а взмах крыла под себя направляет поток воздуха,создавая вертикальную тягу. Грубо говоря так. А угол атаки установки крыла думаю делать в +2*,больше не имеет смысла. Главную роль играет правильная амплитуда взмаха крыла. Правда полную амплитуду как у птиц повторить сложно ,очень сложные узлы сочленения в крыле будут,пока не хочется этим заморачиваться.Тем более летит с половиной амплитуды.
Во, хочешь мозги заморочить посмотри в личку кинул ссылку на книгу пароль в личке.правда там одни скупые расчеты.
vitanar.narod.ru/autors/…/toropovvlad.htm вот статейка посмотри
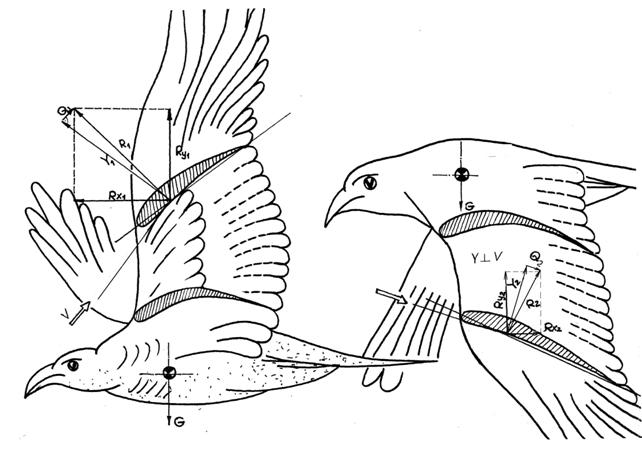
при опускании крыла при подъёме крыла
Схема сил махолёта
Спасибо, хоть я в сверхестественное не верю (про эфироиды:)), но почитаю (сказка ложь да в ней намек).
Интересная история от Владимира Торопова.
Углом атаки крыла управлял специальный пружинный механизм. Затем я стал управлять рукой – стало лучше. Создавалось впечатление, что крылья нуждаются не столько в силе, сколько в правильном управлении.
А что Владимир Торопов не запатентовал еще способ извлекать бесплатную энергию из воздуха? Раскачать упругое крыло крутильно-элеронным флаттером и забирать часть энергии на тягу.
Но дело в том что флаттер это не бесплатное мероприятие, он берет энергию из воздуха тормозя крыло.
Хотя есть заявка “крылья мускульного махолета с резонансным приводом (заявка ******* Булычева М.Г.от 21.01.1988 г.”
В этом здравая мысль в том, что без пружинного аккумулятора энергии махов, требуется в два раза больше затрат этой энергии на машущий полёт.
Птицы и насекомые об этом знают и накапливают энегрию в растягивающихся машцах. Но в Festo SmartBird такого нет, не такая уж и умная эта птичка 😃.
Но в Festo SmartBird такого нет, не такая уж и умная эта птичка .
Они пошли по простому принципу ,и они использовали геометрию движения крыла ,и в этом плюс. Если бы они хотели сделать мускульную систему они бы сделали но это было бы очень тяжелый аппарат. А механические руки -ноги с использованием мускул они уже повторили сделав роботов человека и животных.
По этому нам не следует то же заворачиваться какими то не понятными разработками других,хотя они выглядят интересно.
Что у тебя с амплитудой маха или делаешь другой редуктор. Я уже пробовал менять геометрию шатуна ,добавлять дополнительные элементы ,но пока без результата.Математически рассчитать с помощью тригеометрии или механики не знаю не селен.,можно ли.
В данный момент, собираю метровую (1100мм, 250гр) птичку без управления углом атаки, с приводом только на “кисти”. По результатам, потом буду думать, как и что делать дальше (из чего делать скелет крыльев и т.д.).
они использовали геометрию движения крыла ,и в этом плюс
Че то я ничего таково у них не вижу 😃
Че то я ничего таково у них не вижу
Ну как же ,идет полный взмах и изгиб крыла в нескольких точках,правда опускается вниз только до 10*,хотя полное опускание должно быть до -15*, но при этом они учли в ВМ изменяют угол и НМ точке крыло делает как бы гребок(как весло),что повторяет естественное движение крыла… У других моделях которые существуют крылья просто нервно дергаются туда-сюда.
Я делаю все и сразу,по этому нужен помощник компьютерщик. Я буду использовать карбон ,поскольку удалось достать, и будет денежка на крылья то же куплю трубочки. А так я видел модель где узлы клеились из стеклоткани.
Вот, что успел сделать за пару дней - скелет движителя, осталась обтяжка. Подвижное крепление на оси с загрузкой торсионной пружинкой из сварочной проволоки на полуавтомат. Загрузка немного слабее “расчетной” с возможностью укорачивать пружинку и увеличиавть жесткость поворота на оси. Стандартные сервы в качестве привода. Сколько протянут неизвестно, надеюсь на несколько полетов хватит 😃
М-да,боюсь что не потянет,маленькая скорость у них для маха.Не , не то ,да и крыло плоское.Получиться обыкновенны вжик…
Да скорость маловатая? Три взмаха в секунду на 60 градусов, у голубя в два раза меньше размером 5 взмахов. Почти нормально.
А потянет не потянет это вопрос мощности сервомашинок? Нужно примерно 8 ватт мощности - почти хватает.
В программе Профили нашел подходящий профиль .Делаю шаблоны,вырежу и пенопласта заготовку профиля и по ней из бальзы буду выклкеивать нервюры.Поверх потом каждую усилю карбоновым волокном.То же потихоньку тронулся с места.Слушай ,а хвост какой формы планируешь.Я наверно все таки сделаю V образный и направить V вниз, или просто плоский?
хвост какой формы планируешь
Продольная устойчивость здесь конечно плохая, но это самая маленькая из проблем 😃. Я выкладывал картинки, хочу сделать как можно больше похоже на живую чайку. Если с V, то “красивше” наоборот в виде буквы Л. А руль направления в виде лап снизу.
Я вот посмотрел червячные редукторы стеклоподъемников. Рабочая нагрузка 2 Ньютона на метр, это с запасом - т.е. в 3 раза больше чем будет. Преимущество отсутствие шума, а то жужащих птиц в природе не бывает. Набросал в карандаше кинематику, лучше чем на Festo всё равно не придумать, но если сделать отдельный привод “кисти” и другие усовершенствования на которых они сэкономили вес, то можно выиграть за счет большого маха крыла. Буду закладывать 80* полностью рабочего маха без “обмана” (но с возможностью перенастройки “на земле”).
Да читал такое. Инж.Тихонравов М.К. 1937год.
Вот чего можно получить простыми методами.
Вот еще продвинутая птичка от Robert Musters а.
www.youtube.com/watch?v=bF6eAmzse8c
Вот парень, то же не заморачиваясь, взял две мощные сервы и оно даже полетело.😃
Самая лучшая конструкция с простым приводом и эластичным крылом. Недостаток отсутствие профиля.
Вот тут тема на RCgroups. Но я повторять не планирую, слишком много шестеренок 😃
Самая лучшая конструкция с простым приводом и эластичным крылом. Недостаток отсутствие профиля.
Думаю, что только вокруг столба эта птичка и будет летать. Стоит только её отпустить, она тут же начнёт падать кирпичом вниз. Чтобы на этой скорости она набирала высоту при этой частоте взмахов, у неё удельная нагрузка на крыло должна быть где-нибудь 2-3 грамма на дм.кв. А увеличить частоту взмахов наверное будет просто нереально.
А на другие видео автора посмотреть?
Когда критикуешь нужна уверенность. Покритикуем например мэтров аэродинамики. 😃
“Еще в 1912 г. знаменитый аэродинамик Теодор фон Карман (1881—1963), наблюдая полоскание полотнища флага на ветру и колебания тростинки поперек потока воды под действием возникающих за ней вихрей, разработал теорию вихрей, располагающихся в шахматном порядке за плохо бтекаемым телом, которая стала называться «вихревой дорожкой Кармана».
В.В.Голубев пришел к выводу, согласно которому спутная струя позади машущего крыла представляет такую же вихревую дорожку, но с направлением вращения вихрей, противоположном тому, какое имеют вихри в известной дорожке Кармана. Такую дорожку стали называть «дорожкой Голубева».
Измененное направление вращения вихрей в дорожке Голубева обеспечивает их взаимодействие, которое выражается в перемещении массы среды спутной струи в направлении набегающего потока, т.е. образуется тяга. Величина тяги вычисляется по формуле, предложенной еще Карманом для определения сопротивления, только с обратным знаком. Результаты теоретических работ В.В.Голубева по машущему полету были подтверждены экспериментами, проведенными сотрудником Института механики к.т.н. Я.Е.Полонским в 1948 г. на специальной установке в гидроканале МГУ.”
Тут я, в корне, не согласен с Голубевым 😃. На самом деле вихревая дорожка Голубева является не источником тяги крыла птицы, а только индикатором наличия пульсирующей подъемной силы крыла (т.е. зеркальным отражением изменения циркуляции). Вихри обратного направления образующиеся в этом случае это стартовые вихри возникающие при изменении подъемной силы, не важно есть при этом тяга или нет. Кроме этого наличие обратных вихрей это показатель не тяги, а потерь возникающих при импульсном способе создания тяги.
В случае постоянной тяги создаваемой крылом планера (летящего со снижением), за счет поворота вектора тяги, никаких стартовых вихрей (и вихревой дорожки) не образуется (и вобще никаких вихрей кроме циркуляции).
Ну кому это интересно 😃?