Самодельный гексапод on-line

Привет всем, я уж думал тема не интересна… 😉
Тема, конечно, интересна.
Но есть пара вопросов, с которыми нужно определиться.
- избыточность. Скажем, в два раза. Стоит ли оно того ?
- низкое отношение область обработки vs габариты. Важно ли ?
Т.е. для гравировки монеток - подходит.
А вот для выпиливания дверей из цельного куска дерева - как-то не очень.
Кстати, есть ли какие программки для моделирования гесаподов ?
зы: ротопод понравился.
Вообще, показалось, что гесаподы с постоянной длиной ног как-то проще в технологии выглядят.
избыточность. Скажем, в два раза. Стоит ли оно того ?
Не знаю плохо ли что есть избыточность, да и почему в два раза? То что одна степень свободы (вращение вокруг z) я понимаю, но еще?
низкое отношение область обработки vs габариты. Важно ли ?
Т.е. для гравировки монеток - подходит.
А вот для выпиливания дверей из цельного куска дерева - как-то не очень.
Это конечно да, есть такое дело, но не монетки конечно 😃 и тем более двери (для дверей конечно гексапод не подойдет, и избыточен в два раза). А вот для фрезеровки моделей для литья и чистовой обработки отливок топливной аппаратуры самое оно.
зы: ротопод понравился.
Вообще, показалось, что гесаподы с постоянной длиной ног как-то проще в технологии выглядят.
Ротопод вообще супер, как раз хотел запостить сюда в предыдущем сообшении, да сказали что нет прав… для формата swf. С постоянной длинной ног еще проще триподы, но почти везде есть изгибающие моменты изначально.
Кстати, есть ли какие программки для моделирования гесаподов ?
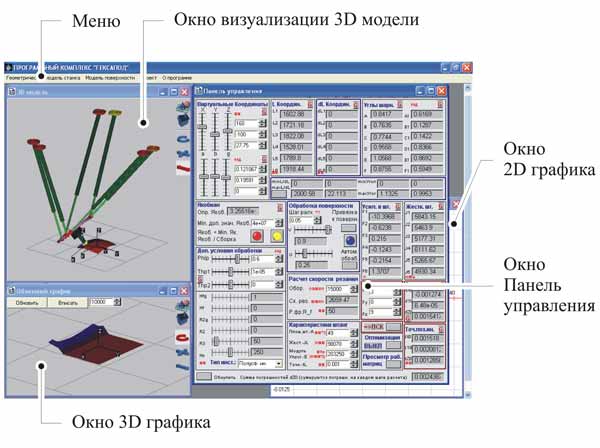
Для моделирования есть - собственного написания, на MathCAD, но это простейший транслятор координат, пока 😉 И еще у чехов вроде встречал как то в сети он-лайн расчет рабочего пространства, у них кстати гексапод с постоянной длинной ног - найду еще раз вложу ссылку.
Не знаю плохо ли что есть избыточность, да и почему в два раза? То что одна степень свободы (вращение вокруг z) я понимаю, но еще?
Правильно. 6 - просто лишняя, а в 5 и 4 - нет необходимости.
Я так смотрю по форуму - даже не трех, а двух было бы достаточно 😃
Даже для “моделей для литья” мне 3х (было бы) вполне достаточно.
А просто так взять и увеличить себестоимость в два раза - как-то не очень.
Ротопод вообще супер, как раз хотел запостить сюда в предыдущем сообшении, да сказали что нет прав… для формата swf. С постоянной длинной ног еще проще триподы, но почти везде есть изгибающие моменты изначально.
У ротопода жесткая конструкция, если привод ног крепится не к оси, а к “трубе”.
Кроме того, в оргинальном гексаподе сопряжение гайка/винт так же не идеально.
Мне даже кажется, что ротопод жесче.
Для моделирования есть - собственного написания, на MathCAD, но это простейший транслятор координат, пока 😉 И еще у чехов вроде встречал как то в сети он-лайн расчет рабочего пространства, у них кстати гексапод с постоянной длинной ног - найду еще раз вложу ссылку.
Преобразование координат - отдельная тема.
Мне бы хотелось помоделиравать рабочую область vs габаритные размеры vs углы между направляющими.
Правильно. 6 - просто лишняя, а в 5 и 4 - нет необходимости.
Я так смотрю по форуму - даже не трех, а двух было бы достаточно 😃
Даже для “моделей для литья” мне 3х (было бы) вполне достаточно.
Мне кажется что на эту тему просто бессмысленно спорить.
…
Но все же не удержусь 😉 : в этой конструкции начисто отсутствуют какие бы то ни было направляющие. Да и ТЕОРЕТИЧЕСКИ не слишком важна точность монтажа, т.е. длинна ног может различаться, ноги могут быть установлены не идеально точно (относительная точность перемещений при этом обязательна, что обеспечивается винтом-гайкой). Собственно точность определяется не железом, а ПО. Как говорят в Hexel, гексапод - это “soft mashine”. Теперь почему я говорю “теоретически”: потому что я еще пока не владею таким софтом, однако знаю что он реализуем, моими силами.
У ротопода жесткая конструкция, если привод ног крепится не к оси, а к “трубе”.
Я имел ввиду хекселовский ротопод, так у него вроде (в Вашей нотации) привод крепится к трубе (только это не совсем труба 😉).
Кроме того, в оргинальном гексаподе сопряжение гайка/винт так же не идеально.
Мне даже кажется, что ротопод жесче.
Конечно у ротопода меньше потерь точности, т.к. меньше сопряжений. Но у ротопода есть еще направляющая - кольцевая.
Мне бы хотелось помоделировать рабочую область vs габаритные размеры vs углы между направляющими.
Вот вернусь с каникул… - щас бы сделал, да нету маткада под рукой.
относительная точность перемещений при этом обязательна, что обеспечивается винтом-гайкой
Тут и будет неточность, в винте/гайке. Еще минус - меньшая нагрузка.
Ротопод тут в баальшом плюсе.
Теперь почему я говорю “теоретически”: потому что я еще пока не владею таким софтом, однако знаю что он реализуем, моими силами.
Не суть. Софт - вполне реален. Мозх бы не задымился лишь.
Конечно у ротопода меньше потерь точности, т.к. меньше сопряжений. Но у ротопода есть еще направляющая - кольцевая.
И что ? В контексте того, что
Собственно точность определяется не железом, а ПО. Как говорят в Hexel, гексапод - это “soft mashine”.
Там может быть хоть яйцо - точность не пострадает, т.к. остальные причины неточности отсутствуют.
Вот вернусь с каникул… - щас бы сделал, да нету маткада под рукой.
Ок, не вопрос.
Тут и будет неточность, в винте/гайке. Еще минус - меньшая нагрузка.
Ротопод тут в баальшом плюсе.
Зато привод ротопода думается мне… тоже в баальшом плюсе, только в денежном.
Не суть. Софт - вполне реален. Мозх бы не задымился лишь…
…Ок, не вопрос.
еще одна ссылочка
а ниже его страничка где он программу писал
Кстати, есть ли какие программки для моделирования гесаподов ?
Один из вариантов обсуждается здесь рядом, в теме “linuxcnc”.
rcopen.com/forum/f41/topic57659/20
Там между делом поднялся вопрос о софте для машин, требующих преобразования координат (см. пост № 24 и далее).
Что уважаемая общественность думает по поводу такого софта для управления сабжем?
…Что уважаемая общественность думает по поводу такого софта для управления сабжем?
Пока этот вопрос осмыслить не удалось, предполагалось что софт для гексапода будет написан самостоятельно, однако, думается сначала попробую и готовые решения. Особенно привлекательно то что это opensource 😃, хотя с линуксом и си дел до сих пор не имел.
Constantine, спасибо за ссылку - потянула за собой много хорошего и нужного.
Вот нашел Сайт нашего соотечественника защитившего диссертацию по гексаподам.
Первый блин комом 😵 , может кто нибудь знаком с ситуацией?
GOOD DAY spike
Жалко - тема заглохла.
Хочется поддержать.
Предлагаю для конструктива использовать рулевые рейки от авто
можно нарыть б/у в автомастерских, в них косозубая рейка и люфт выбирается
Это будет уже законченный модуль,
а если восстановить гидравлику в них - то рулезная вещь получится.
Один компрессор на все рейки + гибкие шланги.
Длинну выхода поршня можно увеличить дорезав зубъев на рейке.
GOOD LUCK
проблема только с программным обеспечением
где его взять?
GOOD DAY spike
Жалко - тема заглохла.
Хочется поддержать.Предлагаю для конструктива использовать рулевые рейки от авто
можно нарыть б/у в автомастерских, в них косозубая рейка и люфт выбирается
Это будет уже законченный модуль,
а если восстановить гидравлику в них - то рулезная вещь получится.
Один компрессор на все рейки + гибкие шланги.
Длинну выхода поршня можно увеличить дорезав зубъев на рейке.GOOD LUCK
проблема только с программным обеспечением
где его взять?
GOOD DAY, GOOD! 😉
Спасибо за поддержку!
Работа над проектом продолжается несмотря на серьезные препятствия (бытового характера 😃 )
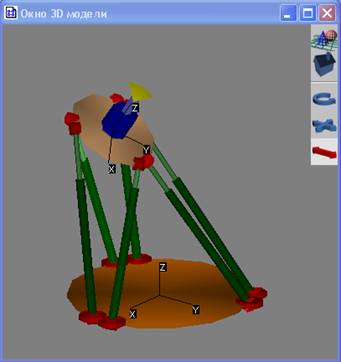
На данный момент существует две версии гексапода (SW-модели конечно) - первая с карданами, вторая с шаровыми опорами. Дальше просто - нужны средства. К первой схеме я вернулся с мыслью об удешевлении.
Насчет ПО: черновые наброски, пробы различных уровней, средств, технологий потихоньку появляются. ПО задумано универсальное, т.е подходящее для любой кинематической схемы. Если интересно, и есть желание детально обсудить проблему - велкам в асю (есть в профиле), относится ко всем ☕ .
Насчет рейки - первая мысль " 😃 ❗: как я сам не додумался", вторая: “😦 блин ход маловат, нарезать то можно конечно, но…”, а вообще мысль ценная.
С уважением, Spike.
GOOD DAY, GOOD! 😉
Спасибо за поддержку!
Работа над проектом продолжается несмотря на серьезные препятствия (бытового характера 😃 )
На данный момент существует две версии гексапода (SW-модели конечно) - первая с карданами, вторая с шаровыми опорами. Дальше просто - нужны средства. К первой схеме я вернулся с мыслью об удешевлении.
Насчет ПО: черновые наброски, пробы различных уровней, средств, технологий потихоньку появляются. ПО задумано универсальное, т.е подходящее для любой кинематической схемы. Если интересно, и есть желание детально обсудить проблему - велкам в асю (есть в профиле), относится ко всем ☕ .Насчет рейки - первая мысль " 😃 ❗: как я сам не додумался", вторая: “😦 блин ход маловат, нарезать то можно конечно, но…”, а вообще мысль ценная.
С уважением, Spike.
GOOD DAY
Конструктив с рейкой у тебя “в кармане” остается дело за программкой.
Обсудить буду рад по “мылу”.
Перечитал твой блог но не нашел какой планируется ход поршня?
У меня в гараже валяется пару реек измерю ход поршня - отпишу.
Подумаю о возможности увеличения хода поршня (самому интересно)
Мне бы программку, я бы и сам на гексапод перешел.
И почему планируешь 6 ног, на 3-х намного проще?
GOOD LUCK
на 3-х намного проще?
А жесткость на кручение не нужна? Все сложится 😃
GOOD, именно так:
А жесткость на кручение не нужна? Все сложится 😃
но, конечно, и в этом случае есть решения: трипод:
, но тут опять направляющие…
есть еще интересные конструкции, думаю вот такую еще проработать:
…но, конечно, и в этом случае есть решения: трипод:
, но тут опять направляющие…, хотя в случае с рейкой - направляющая уже есть.
Насчет хода: в принципе для экспериментов можно попробовать и маленький ход, для гексапода планирую ход около 300мм (длинна ноги от 600мм до 900мм).
А трипод-то легко выполним.И жесткий, если тяги и башку развернуть вниз,а верх закольцевать.
Плоскость задают 3 точки и тут вполне минималистично. 😃
На выставке ВТТВ стоял вот такой аппарат. Он обмеривал всякие детальки.
А трипод-то легко выполним.И жесткий, если тяги и башку развернуть вниз,а верх закольцевать.
Плоскость задают 3 точки и тут вполне минималистично.
А ось на башке сделать телескопическую и +поворотный стол.
Как программу только делать,вот в чем явно засада.
GOOD DAY spike
собственно шесть так шесть на 3 рейки больше на 3 меньше
этого добра в автомастерских хватает.
Sorry, до гаража не добрался, но ход рейки примерно и будет 300мм.
В рейке если не планировать использование гидравлики
то внутренний шток (25мм) можно полностью нарезать и использовать
по всей (почти) всей длинне, или заменить на более длинный.
У меня есть ребята знакомые они рейки ремонтируют спрошу у них
по поводу гидравлики и какие рейки длиньше.
Но думаю с этим надо заморачиваться в перспективе.
А сейчас просто взять рейки приколбасить их к листу ДСП
покрутить и посмотреть как это все будет работать.
Если не трудно набросай мне ссылок по гексаподам
интересно будет почитать.
GOOD LUCK