Долгожданный Brain2

Сделал, модуль ответил ОК, подключаю у брейну.
С брейном пока не работает.
Но, через программатор и путти на команду AT+UART? отвечает
+UART:115200,0,0
OK
отправил AT+NAME=BRAIN, имя модуля изменилось, теперь в сети телефон его видит как BRAIN а не как HC-05.
команда AT+PASS=1111, ответил еррор, или это не пин код?
Поменять пароль
AT+PSWD=1111
Нашел, AT+PSWD=1111, пин код меняет. )))
Уже ответили )))
Огромное вам спасибо, попробую дальше разбираться!
Еще раз всем спасибо!
Все работает!
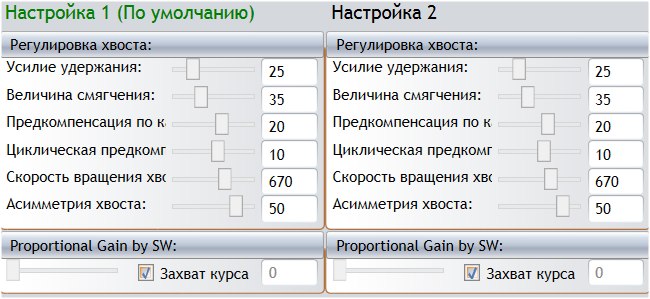
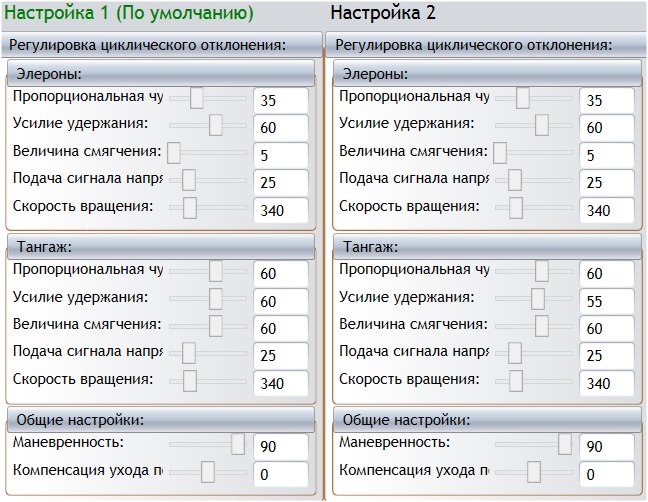
Настраивал айкон. Покачивает на остановках элеватор. Что-то 320 град/сек в брейне и скукуме две разные вещи
Юр. Победишь кач по элеветору, опиши какими параметрами рулил. У меня тот же трабл.
У меня в это воскресенье был возбуд по тангажу, на P и I практически не реагировал. А как только увеличил D так возбудился на висении. Убавил D - возбуд пропал. Думаю в этом случае первым надо тоже крутить D
У меня было что перекрутил D верт после взлета дико трясло, но ща все по дефолту было. Я I под 70 накрутил
А как только увеличил D так возбудился на висении. Убавил D - возбуд пропал.
P и D неразлучные параметры. D позволяет повысить P и тем самым уменьшить время реакции системы. Но если задрать сильно параметры P и D то возможно возбуждение замкнутой системы, что и произошло у Алексея. Если повышение D не дает результатов, осцилляции не проходят, то нужно уменьшать и P и D. А вот I надо крутить когда после выхода объекта управления на заданный угол - происходит его увод в связи с ошибками симметрии, развесовки и т.д. Большое I плохо - оно увеличивает время реакции системы и ухудшает четкость управления.
По-моему каждый параметр сам по себе может вызвать потерю устойчивости системы. Есть вообще PI регуляторы и чувствуют без D себя нормально
По-моему каждый параметр сам по себе может вызвать потерю устойчивости системы. Есть вообще PI регуляторы и чувствуют без D себя нормально
Абсолютно верно. Но у PI регулятора время реакции больше чем у PID регулятора, как раз D и дает эту возможность повысить P в регуляторе.
Я свой сим писал на unity, там фбл с пид регулятором, у меня D часто вызывал колебания и не смягчал ничего, я его занижал сильно, может, накосячил где. Очень долго не мог хвост побороть, до конца так и не поборол, на питчпампе дергает…
А чтобы сделать хвост резче в брейне надо D понизить или повысить, я из описания не понял. А в самом низу Р, ток он настраивается с аппы типа, тоже не понял
покачивание по элеватору? а что за сервы?
Да, align 815h
имхо это потому, что сервы - медленные. Если я правильно понимаю, то они вообще не для головы. Брайн - это я уже понял - любит быстрые и мощные сервы.
Попробуй следующее:
- Убери FeedForward в ноль.
- поиграй с Dgain, попробуй поставить его побольше
- Уменьши скорость переворота.
Тут история такая: все проблемы такого плана начинаются, когда ты пытаешься сделать вертолет более резким. Брайн позволяет сделать вертик очень резким, но должно хватать производительности серв. Если они слабые или медленные, начнутся раскачки, отскоки и всякие паразитные движения, которые ты не уберешь ничем кроме уменьшения резкости вертолета.
сервы - медленные.
Игорь у них 2 вида 815ых серв:)
Надеюсь у Юрия все же не те что Ты прислал, а эти shop.align.com.tw/product_info.php?products_id=527…
Игорь у них 2 вида 815ых серв
А, ну это - другое дело! Тогда пусть Юра отпишется, какие у него. Я помню, что этот вопрос уже во второй раз возникает…
У меня вторые, красненькие
тогда уменьшай FeedForward. Сколько он у тебя сейчас, и сколько скорость переворота по элеватору, как она соотносится со скукумовской?
Можешь ли записать логи, где будет Swash Elevator, ElevatorRotationSpeed, RxElevator, PitchOut
и напиши, какие параметры стоят на голову
или пришли мне на мейл файл настроек.
У меня первой версии