PitLab FPV System: OSD+Autopilot+Ground station

Самолет летит точно по курсу к базе, не придумывайте что ещё, просто чуть бочком летит, но летит точно к дому, так как курс жпс. Ты можешь хоть боком бежать по дороге, но твоё направленик остаётся неизменно, так и тут. Пит лаб просто держит курс и держит его хорошо, то что боком немного, это в пределах допустимого, вот и кажется что база справа и нет никаких поправок у автопилота.
)) этот параметр я уверен берётся от гироскопа, указывает что самолет летел чуть бочком по направлению к ветру. А сам возврат точно ориентирован был по курсу жпс. Можешь у своего производителя спросить.
второй раз я тебе пишу это Олег, всегда меня умиляли такие люди, сам не пробовал, не видел, но уверен… 😃
Самолет летит точно по курсу к базе, не придумывайте что ещё, просто чуть бочком летит, но летит точно к дому, так как курс жпс. Ты можешь хоть боком бежать по дороге, но твоё направленик остаётся неизменно, так и тут. Пит лаб просто держит курс и держит его хорошо, то что боком немного, это в пределах допустимого, вот и кажется что база справа и нет никаких поправок у автопилота.
Это уже прогресс, что разобрались: автопилот курс держит по ГПС не зависимо от ветра. Главное чтоб не хвостом вперёд…
Теперь давайте разберёмся, что же тогда значило высказывание, что дескать автопилот ни каких поправок не берёт?
Олег, умоляю, нарисуй две картинки: твоё вИдение, как автопилот летит с боковым ветром на точку с определённым курсом “без поправок” и “с поправкой”.
Теперь о логике маршрута: это самый обычный ПИД. Где строка “поправка на ветер” является ни чем иным, как интегральной его составляющей.
И если автопилот “видит” постоянную ошибку (ветер), он заранее отклоняет самолёт. Как упреждение.
Можно и без этого, но тогда с боковым ветром его будет “колбасить” и он постоянно будет отпускать и потом доворачивать.
Теперь же разрабы внесли новую фишку: при переводе режима в АВТОМАТ, автопилот не просто летит по точкам, а возвращает самолёт на нужный маршрут: то есть если радиус поворота слишком велик и самолёт не попадает на заданную линию пути, автопилот его туда возвращает что то типа зигзагообразным манёвром. Если точка одна (как и в случае простого возврата домой), автопилот “мысленно” рисует линию от себя до точки (или базы) и держится этой линии. В этом режиме так же можно использовать магнитный компас.
Сори за сумбур.
А кто летал на питлабе выше 20тыс футов? 😃 Как он высоту там считает?
Вот, что ответил Збигнев: “Barometric altimeter can work up to 7-8km (as far as I remembered it’s pressure range). Other internal limits are mostly 32km (although altitude limits were never tested).
Keep in mind not only altitude, but also temperature (approx -1deg/100m), and whole electronics (OSD, AP, servos, RC, AV) may stop working at very low temperature.”
То есть “программное” ограничение 32км. Остальные ограничения чисто физические: барометрический высотомер работает до 7-8км. Далее не понятно, как поведёт себя электроника в экстримальных температурах (как минимум нужно калибровать на эту температуру гироскоп или выключить стабилизацию).
Можно и без этого, но тогда с боковым ветром его будет “колбасить” и он постоянно будет отпускать и потом доворачивать.
С чего это? Ведь это в пределах его отклонение, а курс не магнитный а жпс. Значит все автопилоты “с поправкой на ветер”. Вы другого не понимаете , что самолет летит и рулится прекрасно элеронами , не смотря что морда чуть левее равернута, я так в ручном летел и есть масса видео где я боком лечу, когда самолет ветром выкручивает. Но это сложно понять когда нет приборов нужных, поэтому я это видел только при просмотре с бортовой камеры когда к полосе подходил, самолет летел боком и с земли люди это наблюдали и я чувствовал снос. Что тут удивительного не понимаю. Вы же из этой фигни пытаетесь раздуть волшебство автопилота пит лаб. Если это так, то у нас фишка 41 тоже волшебная , она именно так же ведет самолет при боковом ветре на автовозврате .
самолет летел боком и с земли люди это наблюдали и я чувствовал снос. Что тут удивительного не понимаю.
покажи видео где ты боком в режиме RTH пришёл ровно на базу? Нету? ну а зачем тогда голимые понты разводить? 😃
Успокойся уже, все АП с компенсацией, с выводом к торцу… с чем там ещё, не помню… А особенно фишка фишка фишка… Которая у каждого второго падает по непонятным причинам…
Полёт боком не удивителен… таких полно…
Глеб, картинка для тебя 😃
Короче бери смело!

Один вопрос. Почему самолет идёт по курсу жпс к дому но дом справа, далее при подлете он уже перед мордой самолета? Если вы думаете что это пит лаб развернул мордой к ветру и затем повернул к дому не меняя курса, то грош вам цена. Пока я не услышал понятного аргумента.
С чего это? Ведь это в пределах его отклонение, а курс не магнитный а жпс. Значит все автопилоты “с поправкой на ветер”.
Естественно! Все автопилоты ориентирующиеся по ГПС, а не компасу уже сами по себе имеют эту “поправку”!
Я даже во всех своих сообщениях это слово специально в кавычки брал.
Колбасить без этой самой “компенсации” будет ровным счётом из-за того, из-за чего будет раскачивать любую инерциальную систему с постоянной внешней силой и нулевым коэффициентом интегральной составляющей. Естественно всё будет зависеть от самого планера, ветра и гейна “возврат на курс” - он же пропорциональный коэффициент.
Но опять же, если обычный автопилот летает по точкам, то Питлаб летает именно по линиям соединяющим эти точки. Это по моему может ещё Смальтим.
Один вопрос. Почему самолет идёт по курсу жпс к дому но дом справа, далее при подлете он уже перед мордой самолета? Если вы думаете что это пит лаб развернул мордой к ветру и затем повернул к дому не меняя курса, то грош вам цена. Пока я не услышал понятного аргумента.
Для автопилота дом постоянно должен быть перед его “виртуальной” мордой. Только это не будет совпадать с продольной остью самолёта. Тебе реально картинку нарисовать, как получается, что дом справа, а потом перед мордой? Ты тролишь что ли? Сергей просто убрал точки с экрана, но там есть указатель на дом: это белая линия крутится вокруг центра экрана. Посмотри, она всегда смотрит в верх. Автопилоту пофиг на ветер!
В конце концов он доводит самолёт до базы и начинает нарезать круги, в это время Сергей берёт контроль на себя.
Что именно не понятно? Ни кто ни где курса не менял.
Глеб, картинка для тебя
Короче бери смело!
Ээ, маловато будет 😃 Игл такие числа тоже хорошо показывает, и обламывается где-то через 100 метров
Ээ, маловато будет 😃 Игл такие числа тоже хорошо показывает, и обламывается где-то через 100 метров
выше же написано, разраб ответил что ОСД способно показывать цифру до 32 тысяч… Я думаю пока вряд-ли кто то сможет взлететь выше 😃

Естественно! Все автопилоты ориентирующиеся по ГПС, а не компасу уже сами по себе имеют эту “поправку”!
Я даже во всех своих сообщениях это слово специально в кавычки брал.
Колбасить без этой самой “компенсации” будет ровным счётом из-за того, из-за чего будет раскачивать любую инерциальную систему с постоянной внешней силой и нулевым коэффициентом интегральной составляющей. Естественно всё будет зависеть от самого планера, ветра и гейна “возврат на курс” - он же пропорциональный коэффициент.
Но опять же, если обычный автопилот летает по точкам, то Питлаб летает именно по линиям соединяющим эти точки. Это по моему может ещё Смальтим.Для автопилота дом постоянно должен быть перед его “виртуальной” мордой. Только это не будет совпадать с продольной остью самолёта. Тебе реально картинку нарисовать, как получается, что дом справа, а потом перед мордой? Ты тролишь что ли? Сергей просто убрал точки с экрана, но там есть указатель на дом: это белая линия крутится вокруг центра экрана. Посмотри, она всегда смотрит в верх. Автопилоту пофиг на ветер!
В конце концов он доводит самолёт до базы и начинает нарезать круги, в это время Сергей берёт контроль на себя.
Что именно не понятно? Ни кто ни где курса не менял.
Все понятно, вы уж извините но я так и понял. Просто Сергей стал чаще летать, вот и удивляется обычным явлением.
То что почему дом справа я то понимаю, спросил потому, что сомневаюсь в вас. Вы как сами трольщики,будто не слышите меня и вообще о другом пишете. У сереги обычный флюгерный эффект поэтому и кажется что дом справа, а самолет как шёл курсом 040 так и шёл. Ничего сверхестестевенного автопилот не делал.
Вот по линку на американский форум www.rcgroups.com/forums/showthread.php?t=2621107&p… Там картинка на высоте 7км.
Но видно, что игловский датчик воздушной скорости показывает бред (-4км/ч). Видно так же, что при внешней температуре в -30, температура чипа гироскопа всего -9, что обнадёживает ))
… Сергей опередил)))
а самолет как шёл курсом 040 так и шёл. Ничего сверхестестевенного автопилот не делал.
А кто говорил, что то другое? У Сергея автопилот с десяти километров вернул модель точно домой, при боковом ветре в половину от круизной скорости. Он этим поделился в профильной ветке. На что ты накинулся утверждая, что это всё лажа, при этом начал спор на очевидные темы, подозревая всех в тупизме, но сам попадая в просак.
Сергей же говорит о том, что “на коробочке написано” у многих, но на самом деле не у всех всё всегда работает.
Плюс ко всему функция удержания ЛЗП, о которой ты в Питлабе не знал, но спорил.
Всем добра!
ОСД способно показывать цифру до 32 тысяч
Скорость -4, сурово
Скорость -4, сурово
я думаю при минус 30 тупо замёрзла трубка ПИТО
но сам попадая в просак.
или летит задом, сдувает.
Скорость -4, сурово
…
покажи видео где ты боком в режиме RTH пришёл ровно на базу?
Ну вообще так делают исключительно все АП, которые берут данные с gps для ориентации на местности. И здесь нет ничего странного, т.к. АП вообще по барабану как летит самолет, ему необходимо взять вектор на дом, а делает он это по координатам, и если он видит, что вектор на дом в стороне от дома, то доворачивает модель в нужную сторону, чтобы вектор был четко на дом. При боковом ветре АП модель немного развернет, но вектор будет четко на дом.
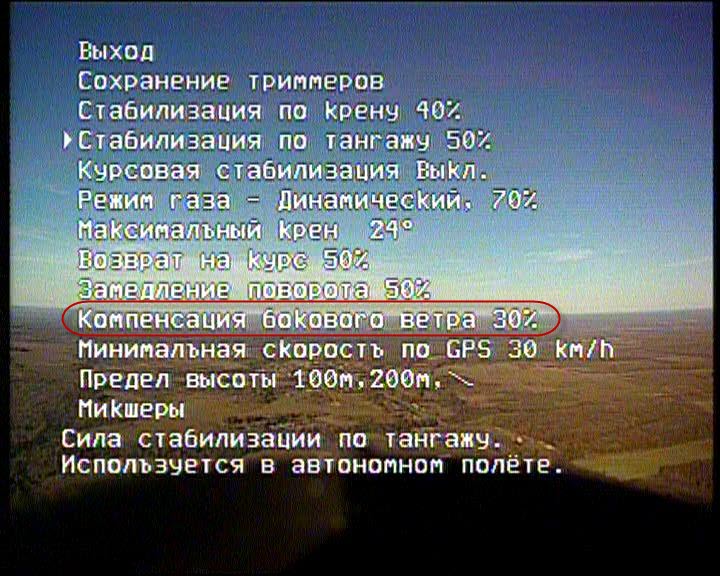
А вот что за пункт меню “компенсация бокового ветра” - это интересно, может он использует его при посадке?
И еще, кто может попросить у производителя часть его схемы, отвечающей за наложение видео, очень надо.
Чет вслух с вас, почитайте чтоль про AHRS.
А вот что за пункт меню “компенсация бокового ветра” - это интересно, может он использует его при посадке?
Я уже парой постов выше описал, что за “компенсация бокового ветра”: интегральная составляющая ПИД регулятора от удержания курса.
Какая то фигня, по вашему получается что автопилот поняв (он понимает примерное направление ветра) и определив что дом условно справа, расчитывает угол и скорость сноса и поэтому выжимает левую педаль что бы лететь хоть боком но держа курс, так что ли? Бред, не тот вес модели и скорость ветра 8м/с судя по данным. Этот снос как я уже говорил развернуло талрна в сторону ветра, а он так и решил ровно на дом. Если бы реально автопилот рассчитывал курс к дому с расчётом сноса, то он шел бы совсем по другому меняя траекторию полёта, а тут она не меняется.
Чет вслух с вас, почитайте чтоль про AHRS.
Вот только от гир и показало 33%, но ни каким путем автопилот на данном видео не вносил поправки в маршрут к дому.
Для внесения автопилотом изменения маршрута с компенспцией ветра, этл только нужно в том случае где есть определённый подход с радиала, на возврате этого нет, автопилот ведет с любой стороны и поэтому автопилот просто не поймет, к какому радиалу его компенсировать,а это явное измение курса.