Пилотажка Янки для крутых пареней

пионэры, политика, в какой библиотеке? как поймать десятку?
Валерий, вам наверное скучно, что вы не даете т.с. писать о создании своей новой модели?
Слава! А для чего тогда пять судей меряют скорость и не за два круга?Меньшее и большее исключают ,по трем-среднее.Что так сильно 0,05 сотых секунды влияют на восприятие полета пилотажки судей.??
Опытный пилот, если после полёта cкажем с скоростью 5,3 прикроется до 5,25 сразу почувствует это, а модель так тем более, а если на десятку быстрей до 5,2 то это уже достаточно совсем другой полет будет.
Я для большей точности бывает засекаю скорость и по 4…5 кругам вообщем дошкольная математика, чем больше кругов тем меньше погрешность, главное со счётом не сбится у меня такое бывало что по расчетом модель 6,0 летела))
пионэры, политика, в какой библиотеке? как поймать десятку?
Валерий, вам наверное скучно, что вы не даете т.с. писать о создании своей новой модели?
Сергей ,здравствуйте!
Т.С. я никак не задерживаю в написании о своей модели.Слава вообщем все обьясняет понятно и содержательно.Про что мне лично не понятно,про то я и спрашиваю.
Если ВАМ все понятно,то почему так отвечаете?Вы больше засоряете тему,вынуждая меня отвечать ВАМ.
Про то что ВЫ говорите Слава ответил мне и вопросы ушли…
Про то как поймать десятку ,или пять соток времени-ответ похоже один—НАЛЕТ.
С Уважением
Преключения продолжаются!
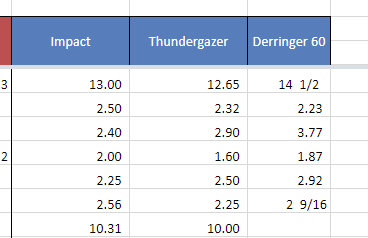
После того как набросал лист желаний и найденны фото для вдохновления(без них никак!) можно начинать строитить, так? Нет, не совсем. Следующий шаг это цифровой анализ и утверждения габаритов модели. Я мог просто взять габариты своей последней модели(Eurostyle) и было бы сравнительно просто. Но и тут хочется что-то улучшить, что-то подправить. Но что поменять? Как подойти к этому процессу так чтобы всё было последовательно а не так, хаотично. Для этого я создал таблицу которая мне помогает заполнить все нужные параметры.
Сначала я ввёл данные моих моделей в колонку.
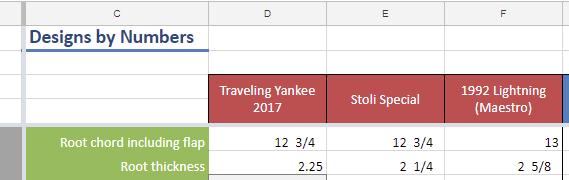
Потом добавил размеры известных моделей для сравнения.
Там были модели Яценко(классика), модель Бурундук опубликованная в 1968-м году под двигатель 6.5, модель Еськина. Но так как эти модели были не того размера или эпохи, я их убрал что бы не отвлекатся 😆
Ну а потом появились вопросы: а какая площадь крыла получается? А какое соотношение площади оперения к площади крыла? А какая средняя корда крыла? Можно ли вычислить оптимальный вес модели? Как насчёт ЦТ? В общем, потянул я за нитку и резвернулся целый клубок!
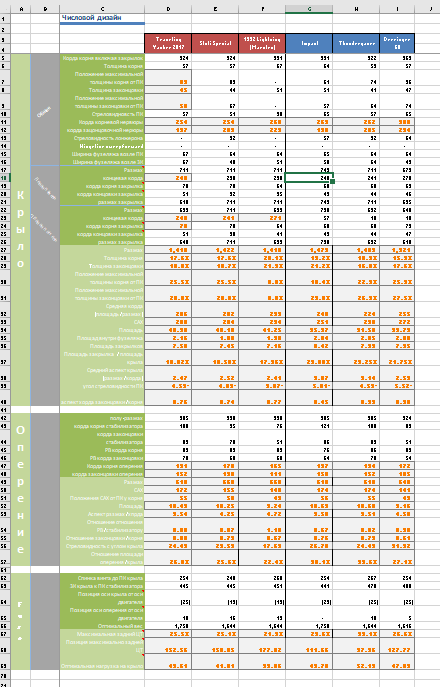
Что бы не перепутать какие ячейки с формулами, я их закрасил в серый цвет и с оранжевым текстом. В общем самая некрасивая комбинация 😆 Но на этом не закончилось!
Недавно, у меня был очень приятный разговор с Игорь Губановым о ЧМ, планах на зиму(что будем строить) и всплыла эта таблица. К сожалению, таблица в дюймах и по-английски и хоть Игорь свободно владеет и тем и другим, он навёл меня на мысль что что такая таблица может быть полезной для жителей этого форума и так радился вкладыш на русском и метрическими измерениями.
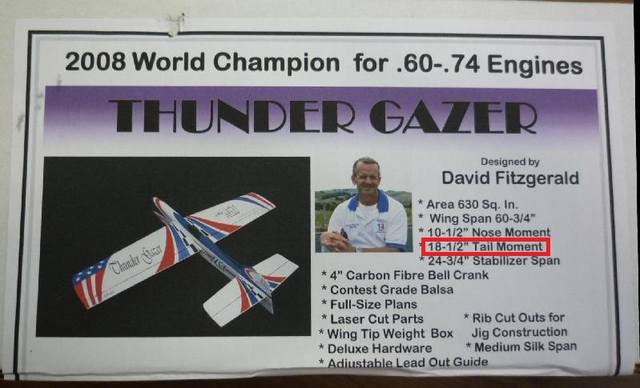
В таблице много интересных вычислений и так как есть размеры разных моделей, эта таблица позволяет сравнивать эти значения с другими моделями. Вот например сравнение площадей крыла Янки и модели ЧМ Давида Фицджеральда Thundergazer:
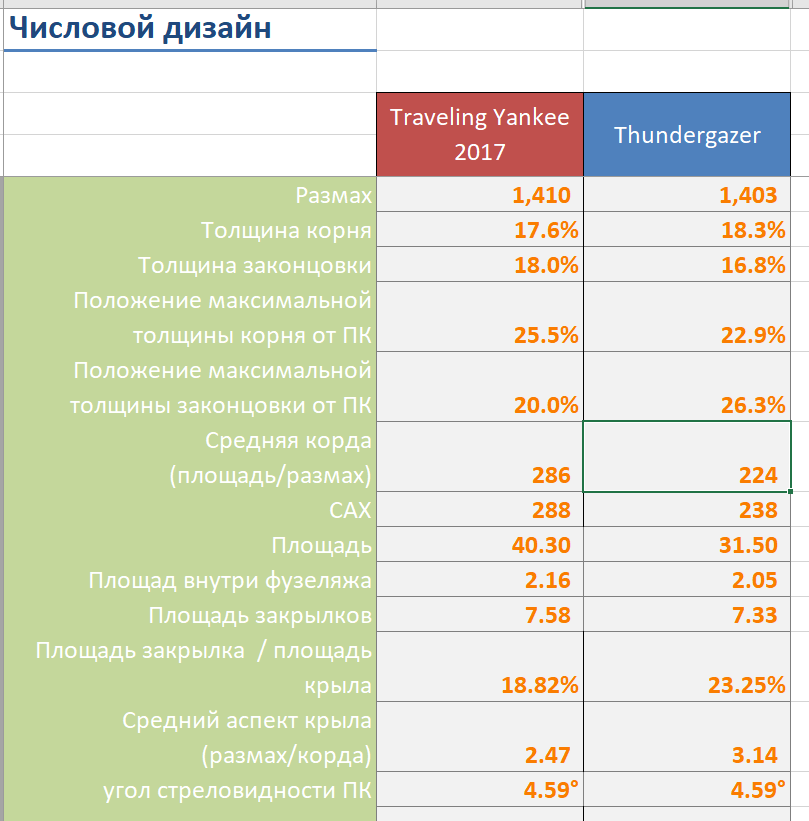
После того как все измерения были введены, я сравнивал все размеры и вычисления со своей предидущей моделью а так-же с с другими моделями чтобы удостоверится что новая модель будет иметь подхожие характеристики.
Любой другой на этом этапе бы остановился и перешёл к чертежам и заготовкам но на моей модели должен быть цельный стабилизатор и там тоже есть пару “ньюансов”. Самый главный был это где расположить ось вращения. Для того чтобы ответить на этот и другие вопрос я обратился к двум авторитетным источникам:
- Иосиф Асланян или Дед Юз. Дед Юз не только строил модели такого рода но и готов был поделится своим опытом здесь на форуме, выкладывая много информации на эту тему здесь на форум. Я собирал эти данные в отдельную папку. Кого интересует, вот: Папка Деда Юза
- Брет Бак из Калифорнии. Брет один из близких друзей и напарников по тренеровкам таких членов сборной США как Давид Физцджеральд и Тэд Фанчер. Он не раз побеждал их обоих, многократных ЧМ и всяких других пилотажников высшего уровня. К сожалению имя Брет Бак не известно за рубежом. Брет работает в НАСА по меж-планетным системам из штатов просто так поехать он не может. Одна из его разроботок пару лет гуляла по Марсу и делала селфи 😛 . Для Давида и Тэда - Брет - был и есть технический гуру.
Оба были рады поделится своими знаниями и после общения с ними я стал более уверен что идея цельного стабилизатор вполне имеет шанс на успех. Время покажет…
Пока вычисляя положение оси вращения стабилизатора меня увлекла новая идея: а почему бы не смоделировать углы отклонения оперения, кабанчика и закрылков? Пару лет назад я обсуждал эту проблему с Ховардом Рашем(бывший член сборной США по Ф2Д и Ф2Б). Он типичный гений типа Григория Перельмана но только более общительный. Он тогда меня загрузил таким количеством информации что мне заняло пару лет что бы переварить весь этот поток знаний. В конечном итоге я смоделировал класическое оперение а так-же систему для цельного стабилизатора. Тут вышло несколько интересных результатов:
- с класической системой оперения и тяги, чем больше откланение от нетрали, тем больше откланение закрылков по сравнению с РВ. Например, при откланении РВ на 30 градусов, закрылок откланяется на 35.
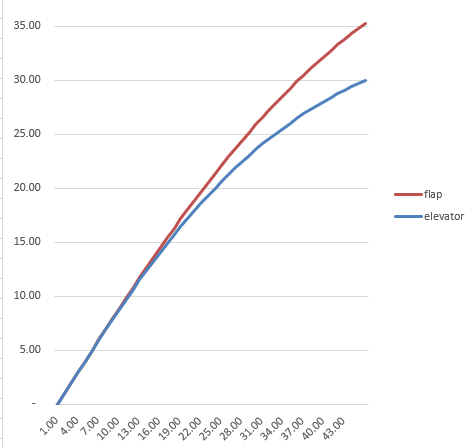
Если подумать, это немного не то что нам надо ведь большое отклонение РВ обычно нужно когда надо проходить углы. Закрылки при откланении создают силу работающую в обратном направлении от оперения значит это излишнее отклонение закрылков мешают модели сделать резкий поворот! Когда я впервые увидел этот график, я понял почему Игорь Бургер использует такую сложную “логарифмическую” систему управления модели. - После того как цмоделировал систему управления цельного стабилизатора как посоветовал Дед Юз, я увидел что эта система тоже “логарифмическая”! Ещё один плюс в сторону использования цельного стабилизатора!
Вот он окончательный результат фазы цифровой разработки:
Красивый подход, я бы сказал - Фундаментальный! Уважуха!
Года 3 назад Александр Прокофьев из USA разработал и начал применять систему дифференциального отклонения руля высоты на бойцовках F2D. По его словам система отлично себя показала и оправдала её применение. Может быть на пилотажных моделях тоже стоит попробовать.
Закрылки при откланении создают силу работающую в обратном направлении от оперения значит это излишнее отклонение закрылков мешают модели сделать резкий поворот!
А не наоборот - ведь закрылки находятся ближе к ЦТ и тоже работают на улучшение разворота - уменьшая скорость модели именно в развороте? Рулями же мы именно рулим…
Американцы на пилотажках давно применяют нечто подобное
но только это не “дифференциальная” механика, а разновидность всё той же логарифмической
Смысл-то один и то же … чем больше угол отклонения ручки от горизонта - тем больше именение угла отклонения руля в сравнении с обычной системой
Смысл-то один и то же
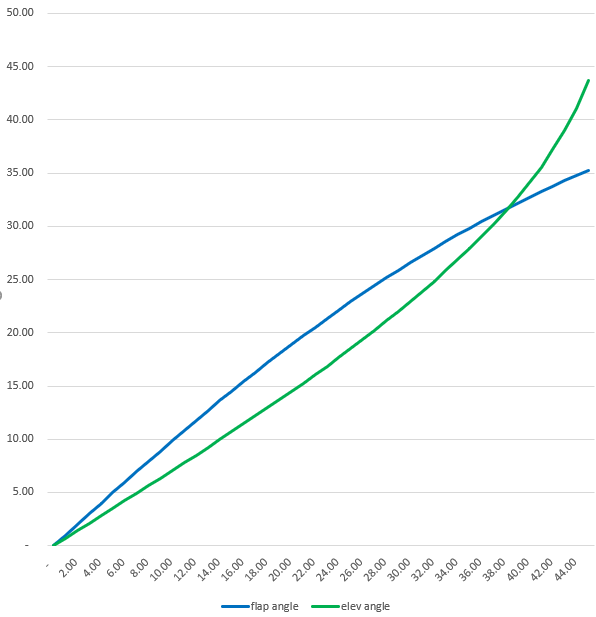
Похоже но не совсем так. У пилотажек закрылки отклоняются в противоположную сторону от РВ. Закрылки помогают модели в повороте уменьшая угол атаки крыла. Но у закрылков так-же есть минус: сопротивление воздуха отклонённого закрылка создаёт вращающий момент в противоположную сторону от поворота модели. Таким образом закрылок и РВ как бы борятся между собой. Чем больше отклонение закрылка тем больше модель сопротивляется повороту. Поэтому когда смотрят на геометрию управления пилотажки, надо смотреть соотношение отклонения закрылка к РВ. Например, возле нетрали у типичной пилотажки отношение 1:1 но как показывает график, при отклонении РВ в 30 градусов, соотношение меняется 1.16:1(35/30). Это делает очень сложным для модели делать резкие углы.
Есть четыре стандартных пути решения проблемы закрылка:
- Уменьшаем ширину(и соответсвенно площадь) закрылка. Таким образом, даже при большом отклонении, закрылок имеет не создаё сильое воздушное сопротивление. Минус у такой модели в том что общая эффективность закрылков.
- сдвинуть центровку модели назад таким образом укоротить плечо силы приложения закрылка. Минус в это подходе в том что модель становится “нервной” в горизонтальном полётя.
- Поменять геометрию управления так что бы уменьшит соотношение отклонение РВ к закрылку при болших отклонениях. Обычно это делается так что бы соотношение закрылка к РВ было 1:0.75 возле нетрали. Минус этого в том что при малых отклонениях(петли например) руль сильно отклоняется и получается очень сложно рисовать ровные петли.
- Увеличить эффективность РВ. Цельный стабилизатор имеет намного большую эффективность чем классическая комбинация стаблизатор+РВ. Имеено таким путём я хочу попробовать решить эту проблему. Плюс следующий пункт:
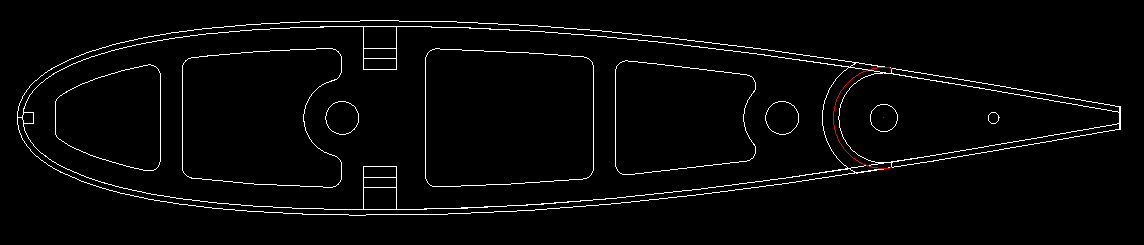
- Сделать закрылок более эффективным с точки зрения уменьшения сопротивления воздуха при одинаковом угле отклонения. Вот типичных закрылок:

A вот закрылок более “обтекаемый” при одинаковом угле отклонения
Я разработал, построил и вылетел модель F2B этого дизайна еще в 1984 году 😎
/Henning
Таким образом закрылок и РВ как бы борятся между собой
А мне всё-таки кажется, что закрылки как раз помогают, благодаря своему тормозящему эффекту. Сделать резкий поворот на крейсерской скорости сложнее чем на более замедленной. Именно поэтому закрылки и прижились на пилотажках. Сравните полёт модели без закрылков и с закрылками - при всех равных, такие углы как с закрылками у модели без них не получится выполнить… Но конечно понятно, что углы отклонения должны быть оптимальными для конкретной модели, а не взяты с потолка…
Закрылки пилотажной модели помогают проходить углы красиво без лишних движений вписываясь в траекторию, пилотажка без них как правило машет хвостом при резких эволюциях.
Похоже но не совсем так. У пилотажек закрылки отклоняются в противоположную сторону от РВ. Закрылки помогают модели в повороте уменьшая угол атаки крыла. Но у закрылков так-же есть минус: сопротивление воздуха отклонённого закрылка создаёт вращающий момент в противоположную сторону от поворота модели. Таким образом закрылок и РВ как бы борятся между собой. Чем больше отклонение закрылка тем больше модель сопротивляется повороту. Поэтому когда смотрят на геометрию управления пилотажки, надо смотреть соотношение отклонения закрылка к РВ. Например, возле нетрали у типичной пилотажки отношение 1:1 но как показывает график, при отклонении РВ в 30 градусов, соотношение меняется 1.16:1(35/30). Это делает очень сложным для модели делать резкие углы.
Есть четыре стандартных пути решения проблемы закрылка:
[*] Сделать закрылок более эффективным с точки зрения уменьшения сопротивления воздуха при одинаковом угле отклонения. Вот типичных закрылок:
A вот закрылок более “обтекаемый” при одинаковом угле отклонения
[/LIST]
на скринах- профили не сопостовимы.
Верхний характерен для “бойцовок”.Да они такие и есть.
“Обтекаемый” более подходит для пилотажек,но это сложное решение для минимизирования перераспределения давления по профилю.
Плечо для ГО - почему не учитываете?
ГО
А что такое ГО? Оперение?
А что такое ГО? Оперение?
Горизонтальное оперение-Г.О.-точки не поставил.ПРосто обычное сокращение,как и В.О.-вертикальное оперение,для самолетов.
С уважением,LEKA
Горизонтальное оперение-Г.О.-точки не поставил.ПРосто обычное сокращение,как и В.О.-вертикальное оперение,для самолетов.
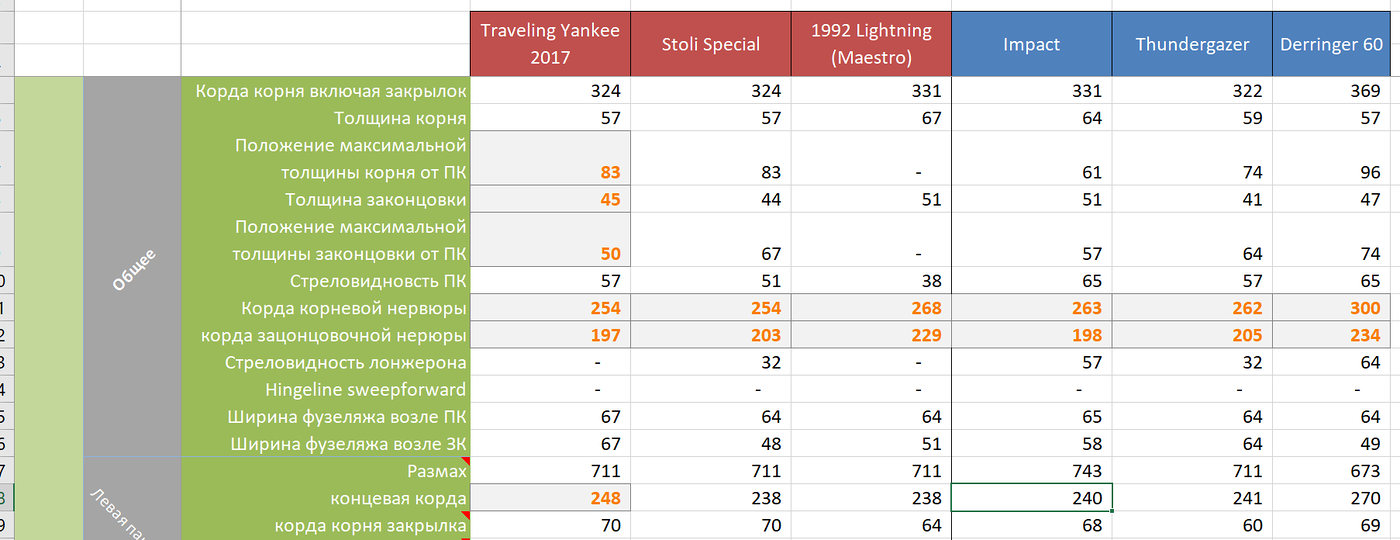
Спасибо. Теперь понимаю ваш вопрос “Плечо для ГО - почему не учитываете?” но не понимаю почему вы так думаете. Если посмотрите на таблицу в конце моего поста( вот линк: drive.google.com/open?id=1o2ZKYw2FUwfcMAnALi1NRvuC… ) то это расстояние написано в строчке 60: расстояние от ЗК(задней кромки) крыла то ПК(передней кромки) стабилизатора. У моих моделей это 445.
Или вы спрашиваете о влияниу плеча ГО на положение ЦТ или формы закрылков на размеры ГО?
Слава, а ты с плечами Г.О ничего не напутал? С единицами измерения. Ну, просто плечи почти в полметра на пилотажках… Например, на фотке “Тандергейзера” вид сбоку хорошо видно, что плечо стабилизатора примерно равно корневой хорде крыла, а она как следует из твоей таблички у этой модели 322 мм. Нестыковочка выходит.
В штатах плечо стабилизатора (так называемый “Tail moment”) измеряют от оси навески закрылков до оси навески РВ.
В штатах плечо стабилизатора (так называемый “Tail moment”) измеряют от оси навески закрылков до оси навески РВ.
Ясно, но это странно и нелогично. Даже в быту расстояние между предметами измеряют по их ближайшим точкам. А в аэродинамике плечо измеряют от 25% САХ крыла до 25% САХ стабилизатора.
Алдар, даже без закрылков пусть в 80мм, получаем 365, на моделях нашей школы я не видел больше 325, т.е. все равно достаточно большое плечо…
Паша, тут дважды подвох, для моделиста с нашим восприятием.
Tail moment = 470 мм.
470-60(Закр.)=410 мм.
410-120(Стаб.)=290 мм.
Как-то так 😉
Алдар прав. Причина почему здесь измеряют от оси подвески закрылка до оси подвески РВ по двум причинам.
Закрылки иногда подрезают или доклеивают во время настройки модели. Многие делают закрылки сьёмными. Меняя площадь закрылков можно настроить модель на качество поворота. То-же самое с оперением. Фицджеральд например построил не менее 5 версий ГО для Thundergazer чтобы добится нужных характеристик.
Вторая причина более техническая. У многих моделей крыло примерно одинаковое. Когда строят новую модель меняют форму закрылков и Г.О. Чуть больше скос передней кромки стабилизатора или делают плавный переход передней кромки стабилизатора в фузеляж на пример диаметром 40мм. Где начинается стабилизатор во втором случае? Вот так. Для более обьективного сравнения моделей, надо было найти какие-то общие точки измерения.
Тут не принято делать одну и ту-же модель год за годом. Очень редко повторяют более двух раз. Поэтому здесь практически нету композитных моделей. Ничего против композитных, просто принято так…
Алдар прав. Причина почему здесь измеряют от оси подвески закрылка до оси подвески РВ по двум причинам.
Закрылки иногда подрезают или доклеивают во время настройки модели. Многие делают закрылки сьёмными. Меняя площадь закрылков можно настроить модель на качество поворота. То-же самое с оперением. Фицджеральд например построил не менее 5 версий ГО для Thundergazer чтобы добится нужных характеристик.
Вторая причина более техническая. У многих моделей крыло примерно одинаковое. Когда строят новую модель меняют форму закрылков и Г.О. Чуть больше скос передней кромки стабилизатора или делают плавный переход передней кромки стабилизатора в фузеляж на пример диаметром 40мм. Где начинается стабилизатор во втором случае? Вот так. Для более обьективного сравнения моделей, надо было найти какие-то общие точки измерения.Тут не принято делать одну и ту-же модель год за годом. Очень редко повторяют более двух раз. Поэтому здесь практически нету композитных моделей. Ничего против композитных, просто принято так…
Давайте порассуждаем:
1,Меняя площади закрылков-изменяем хорду крыла
2,Тогда меняется положение ЦТ(центра тяжести) и естественно ЦД(центра давления),т.е. точки приложения аэродинамической силы.
3,Необходимо поймать равновесие моментов от действия крыла и стабилизатора.
4,Пилотажка летит в режиме “колебательной неустойчивости”
5,Задача-построить пилотажку так,чтобы она была устойчива в колебательном отношении,т.е. уменьшать амплитуду колебаний(сильно затухающих)
6, Поэтому ,более точно(см .пост 44) плечо го нужно считать от 25% от хорды
7,Модель летит хорошо,когда все сбалансировано.
Всегда было интересно, зачем в F2B такие длинные носы. Ну, или, сопоставимые с плечом ГО. Для быстрого затухания колебаний после прохождения «угла» нужно же в основном две вещи: малый момент инерции вращения вокруг поперечной оси самолета и хороший демпфирующий момент ГО. Обе вещи, как бы, должны быть весомее с длинным плечом ГО. Об этом и статья имеется в МК про красивую пилотажку под комод.
И, что-то подсказывает мне, что ЦПГО должно себя лучше проявить как раз на длинном плече.
Как дела с проектом то?
Всегда было интересно, зачем в F2B такие длинные носы. Ну, или, сопоставимые с плечом ГО. Для быстрого затухания колебаний после прохождения «угла» нужно же в основном две вещи: малый момент инерции вращения вокруг поперечной оси самолета и хороший демпфирующий момент ГО.
Обе вещи, как бы, должны быть весомее с длинным плечом ГО. Об этом и статья имеется в МК про красивую пилотажку под комод.
И, что-то подсказывает мне, что ЦПГО должно себя лучше проявить как раз на длинном плече.
Изначальное утверждение что после прохождения угла нужно быстрое затухание вполне правилно НО оно базируется на неправильном утверждении что с длинным носом это как-то невозможно. Это вполне возможно. пилотажки это компромис между резкостью углов, плавностью петель. Это так-же нужда показать фигуры в самом лучшем виде в исключительно маленьком пространстве. Судьи - они люди. Если модель летит быстро, они ничего не увидят: ни мастерства, ни качества. поэтому пилотажки летают медленно. Это единственный авиамодельный спорт где разница между первым и вторым местом идёт в сантиметрах.
Я знаком со статьёй МК. эти идея не оправдала себя. Равносильно как и попытки использовать бойцовки как пилотажки.
Как дела с проектом то?
Проэкт на время заглох после постройки 4-х разный версий крыльев и 3-х фузеляжей. Так как в этом году не получится выехать ни на какие соревнования, желание закончить пилотажку поутихли. Может после лётного сезона продолжим.