Activity
От того что вы добавите подвес, желе вряд ли уйдёт, а может даже и усилится… У меня проблему виброразвязки удалось решить с помощью металлических тросиков.
Ух и винтов же нужно закупать для миника! Полетал вчера - три раза сквозь ветки и кусты пролетал как танк, только на одном винте маленькая коцка. А на четвертый раз не повезло, хорошо так в ветки влетел - минус 3 пропа! )
Не подключал, но вроде ж пишет: “вы назначили на один из переключателей полетный GPS режим (удержание позиции, возврат на базу)”, а алгоритм Basic. Смените алгоритм на вкладке параметры Attitude…"
Нужно ли назначать полетный режим, если необходима только информация GPS для OSD? CC3D, вероятнее всего, просто не хватает ресурсов для поддержки полноценных GPS режимов. Это уже уровень Revo.
Дык, в том то и проблема. Режимы у меня назначены не связанные с GPS! :
да и нету у cc3d режимов GPS никаких! Их выбрать даже нет возможности! Вот и не понятно что это за ошибки такие странные…
А, позвольте спросить, для чего вам на CC3D GPS? Он же протсо координаты отображает. Насколько я помню ни возврат к месту взлета, ни полета по точкам не умеет.
Вот именно для этого и нужно, что б координаты знать! 😃 Ну и, следить за расстоянием от базы… что б не залетать далеко…
Кстати, на клинфлайте допилили RTH? Кто нить пробовал?
Присоединяюсь к вопросу! Особо интересно, будет ли RTH работать на перепрошитом cc3d? Ведь в cc3d компаса нету… А GPS без компаса вроде как работать нормально не может…
Может для обсуждения этого изв…, этой задачи отдельную тему создать?
Эти вопросы про GPS на 250-х навязли в зубах, через страницу.
Если честно не видел на последних страницах информации о cc3d+gps. Киньтесь ссылкой пожалуйста.
Вроде правила форума никто не отменял. По всем контроллерам есть свои темы, и зачем поддерживать тут оффтоп совсем непонятно.
Учитывая, что для гонок жпс вообще не нужен.
Не нашёл если честно ветку по cc3d, так бы конечно туда написал сразу. CrazyCoder уже ткнул носом в тему, ну раз уж тут начал, дослушаю мнения 😃 Кстати, я тоже до недавнего времени думал что GPS не нужен… Нарезал вокруг себя круги потихоньку… Ну и в общем зацепился за веточку (не заметил). А летел относительно быстро и далеко, в общем хватило что бы по энерции отлететь на достаточно большое расстояние… В общем весь оставшийся день лазил в сугробах по пояс, искал квадрик! Причем прочёсывал-то пятно метров 40 радиус… Но это было ппц как сложно. Весь вымок, ужасно устал, думал уже не найду! Но повезло! Вот тогда поставил пищалку. Но её бывает не слышно из-под глубокого сугроба. А gps модуль валялся без дела… Вот и подума что будет не лишним его воткнуть… Весит он считанные граммы, а пользы может принести очень много!
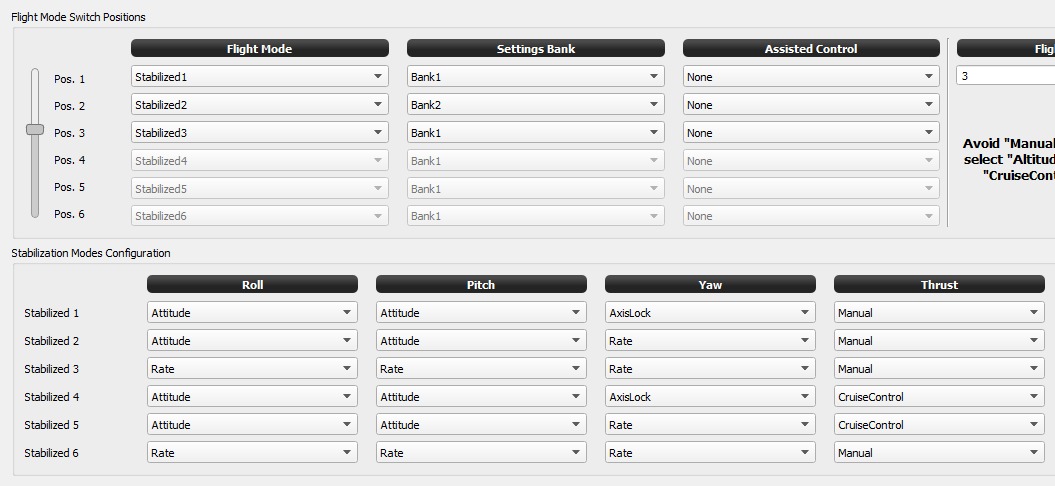
Народ! Ну неужели никто не пробовал вешать GPS к CC3D?? У меня лажа какая-то, ничего не понимаю. Физически всё подлючил верно. Проверил так - выставил порт куда подключен GPS на CC3D в режим ComBrige. Подрубился через софтину для настройки GPS u-center. Всё прекрасно сконектилось! Значит физически я подключаю GPSмодуль к cc3d правильно. Проблема возникает в момент когда я на вкладке System -> Settings -> HwSettings -> OptionalModues перевожу “GPS” в “enable”. После перезагрузки cc3d долго грузится, вываливается куча красных статусов:
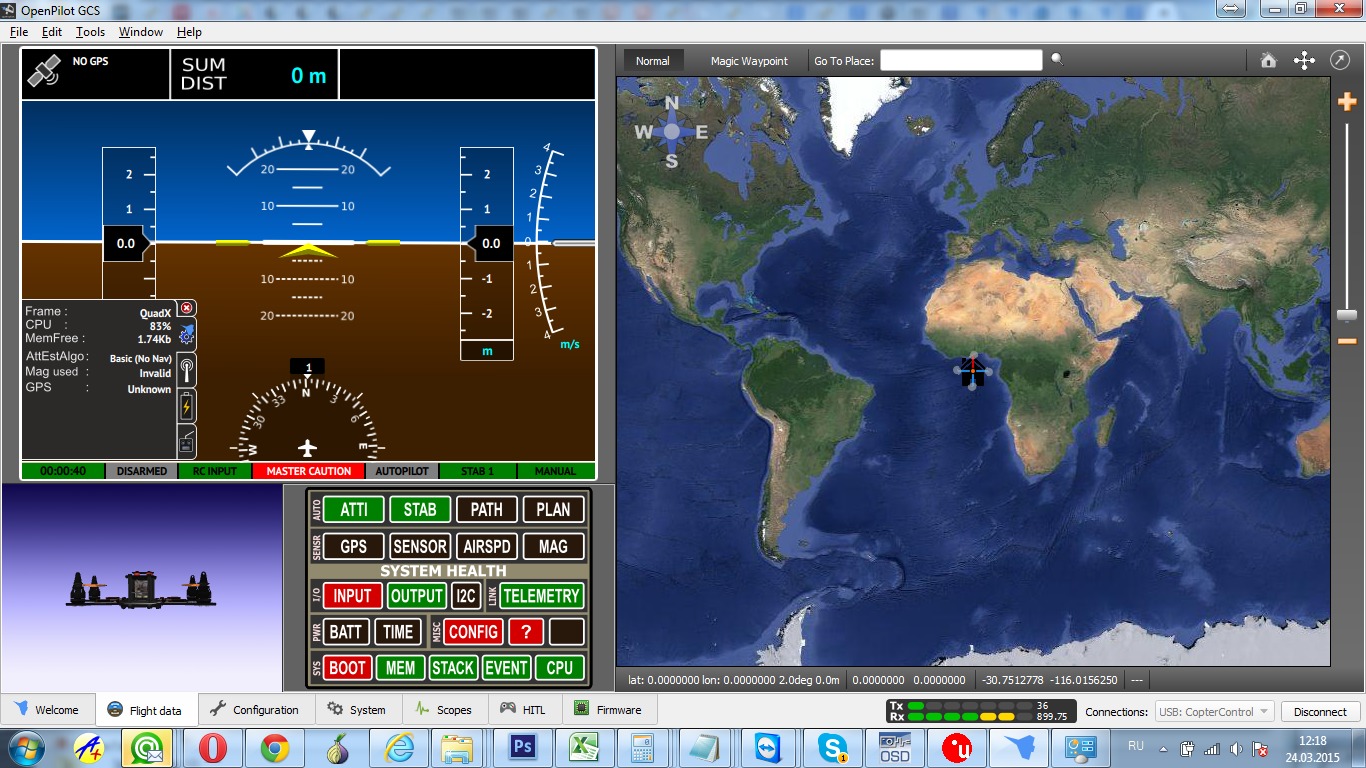
вот что в этих статусах написано:
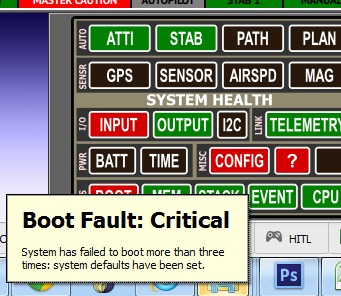
Возникает какая-то проблема с загрузкой как я понимаю, и сс3д сбрасывает настройки. Что написано про GPS вообще не пойму… Не могу найти этот раздел с настройками: Select “GPS Navigation (INS13)” in Config -> Attitude Tab -> Parameters -> Attitude Estimation Algorithm.
Никак не пойму что за проблема… Причем такое происходит именно когда активирую System -> Settings -> HwSettings -> OptionalModues -> “GPS”. Другие настройки меняются без проблем…
Народ, кому удалось подцепить GPS к CC3D? Хочу что бы координаты отображались через OSD. MinimOSD без проблем перепрошил на minoposd, подцепил к сс3д, всё заработало. А вот с GPS засада какая-то… Использую CN06 модуль. Но ничего не получается. GPS даже и не причем, не получается поменять настройки в CC3D. На вкладке Hardware, выбираю GPS напротив порта Flexi, скорость 38400 для GPS. Сохраняю. Перехожу в раздел “System”, меняю OptionalModules -> GPS на “enable”, сохраняю конфиг (кнопка с красной стрелкой), и тут какая-то ерунда происходит - сбрасываются многие настройки совершенно не связанные с гпс! Даже заармить коптер не удается! Приходится заново проходить визард! Что это может быть? Причем когда выключу/включу cc3d, то в графе OptionalModules -> GPS опять стоит disable 😦 Что не так не пойму… версия софта 15.02.
Классные съемки. Скажите, а управление было визуальное (просто управление со стороны), очки или визуальное+монитор?
Спасибо! Да, управление чисто визуальное… У меня сейчас только очки есть. Но в очках так низко летать неудобно… Думаю когда нужно очень низко летать самое удобное будет управлять визуально + контролировать кадр на мониторе. Но на монитор всё никак денег не хватает )
С резинками много экспериментировал в прошлом сезоне. Более менее подобрал жесткость и количество баченков, пришла зима и все старания коту под хвост… Резинки дубеют - опять желе… Этим летом ещё пользовался активно силиконом для барабанщиков (такая хрень синяя желеобразная, её на барабаны клеят что б вибрации поглощать) - летом эта хрень отлично работала, желе проскакивало, но очень редко… Но не понравилось что со временем это желе деформируется (выдавливается из под пластинок) и соответственно свойства меняются… Осенью решил попробовать новую раму (корпус от фантома), ну и коль уж всё переделывать, решил попробовать стальные тросики, т.к. думаю на морозе они будут меньше свойства менять чем всякие силиконы и резинки…
пока ничего хорошего. Заменил тросики на более тонкие. Желе нету но тряска так и не пропала… При висении вроде все более менее впорядке. А как начинаешь двигаться так болтанка. А на примерах на фантиках летают без подвесов так вообще картинка гладкая.
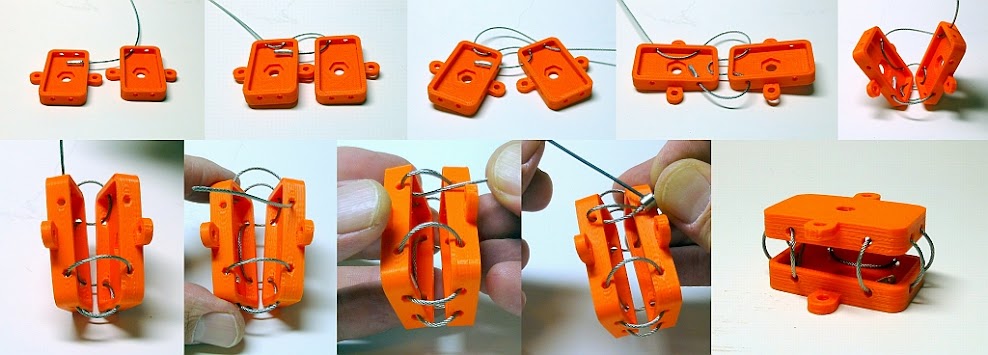
ИМХО тросики сильно длинные у тебя… Я сейчас на работе и точные данные сказать не могу (если надо вечером замеряю). Но вот фото:

Тросик у меня стоит 2мм. Подвес трёхосевой и гопроха3 с аккумом, т.е. демпфируемый вес примерно как у тебя… Сначала пробовал тросик 1,5 мм - он тоже хорошо избавлял от желе - но была другая проблема. Подвес болтался как сопля, раскачивался как маятник и даже коптер немного качал ) 2 мм поставил - стало хорошо. Подвес перестал качаться, желе так же хорошо убирает. Вот видео:
Размер, вес, простота, цена.
Достаточно?
Ну APM есть тоже в таком форм-факторе:

Размер и вес сопоставимы… Ну цена чуть больше… Не думаю что $15 - главный довод против APM…
Загорелся я желанием сделать мини fpv квадрик 250 класса. До этого пользовался контроллерами APM, но заметил что народ в основном на миник ставят Naze32 или CC3D. APM на миниквадрики почему-то предпочитают не ставить… Подскажите, почему Naze32, CC3D подходят лучше чем APM для мини квадрика?
Народ! Вот в ролике заметил клеют ещё какие-то палочки деревянные зачем-то:

Кто скажет зачем?
А я вот не думал что тросик жестко надо фиксировать… вставлял тросик по этой инструкции:
Думал его специально не фиксируют…
Перешел на новую раму, решил попробовать виброразвязку с тросиками. Подумал что для зимы этот способ гораздо актуальнее чем всякие резинки, силиконы, т.к. морозы на свойства стали наверное меньше влияют?? В общем вот что получилось:
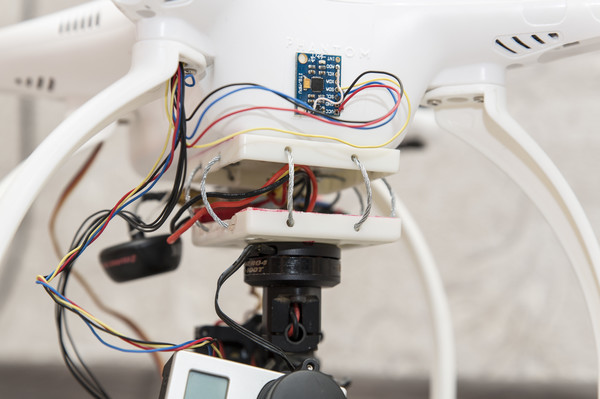
Желе поменьше стало, но до конца избавиться от него не удалось… У кого есть опыт с тросиками, подскажите, в какую сторону двигаться? Я сейчас убрал одну жилку из тросика и немного укоротил… Желе вроде таким же осталось… Надо наверное удлинять наоборот? Но мне удлинять неудобно блин… и так уже подвес почти земли касается (…
Господа, Осенил вопрос: Владельцы заводских рам типа evo, DJI и подобных красивых таких и правельных - при креплении подвесов или просто камер, они тоже вибрируют или как дело предстоит? А то, колхозим тут из алюм. профилей разного диаметра, с дырками и т.п. . Как ведёт себя фирменная рама ? Спасибо.
Своими глазами видел желе на FPV мониторе гексы на джидаевской фирменной раме и с моторами t-motors… Так что думаю заводские рамы в этом вопросе не спасение…
Творчество Леонида:)
Похоже на рекламу, только никаких контактов. Где продаются такие рамы? Смотрю на ваши рамы и слюнями обливаюсь… На своего корявчика из текстолита и алюминия смотреть страшно после ваших рам ) Сам точно не осилю подобную раму… Вот хотел узнать, где можно подобное купить?
а кто какие сервы закупает для башера??
Приехал ко мне и мой башер…разочарование…блин…(( эти козлы одну гайку от колеса не положили и серва не пашет…капец…теперь гайку с сервой ждать хз сколько…
Сервы и правда слабое место видимо… А какую новую серву взял?
я своего катаю достаточно редко, но не жалею его совершенно… Довольно крепкая машинка. В первый же выезд сломался сервосейвер. Почему-то половинки серво-сейвера оказались склеенными и он получается не работал (китайцы злодеи…). Потом порвал вот эту детал : www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr… но тут уже нет претензий к китайцам… Бил его довольно сильно, не удивительно что деталь порвалась… Ну и сейчас вот совсем недавно сгорела серва. Тупо сгорела электронная платка сервы. Даже не знаю почему… В воду её не макал, и ездил в тот момент не активно… Вот пока и все поломки ) А, ну и ни корпусе естественно живого места уже не осталось )
Имею 8-битный контроллер. Купил bluetooth модуль вот такой. Никак не получается подцепить его к Алексмосу. Baudrate поменял на 115200. Но при попытке приконнектиться блутус не надолго загорается красным светодиодом и потом опять начинает моргать. Ничего не происходит. Попробовал вместо блутус модуля подключить ftdi-контроллер. Но через него тоже не смог подключиться… В чем может быть проблема, подскажите пожалуйста!
2 Pickwick: здорово получилось! Завидую! Расскажите с какого оборудования снимали (коптер, камера)?
А я вот недавно мотоциклистов поснимал:
гораздо хуже получилост…
Какие пропы APC брать под SunnySky X2212-13 980kv Series II, 11х4.5 или 10х4.5 или 10х4.7?
батарея 3s
У самого такие движки. Сейчас летаю на винтах 9х4,7, аккумы 4S. Вес квадрика ~ 1600 гр. На 3S пробовал 10х4,5 - тяги хватало, но десятые винты для моей рамы большиваты… Поэтому стал использовать 4S аккум с винтами девятками.
Огромное всем спасибо за советы!
Раму питч выкинь поменяй на замкнутую и все будет хорошо. Если сам не можешь могу помочь. Стоп не помогу слишком далеко.
Если я правильно понимаю это нужно как раз что бы жесткости придать конструкции? Спасибо большое за совет! Осталось придумать как бы это попроще сделать 😃
Фильтр гиро пробуй поднять от 1 до 3 , должно помочь, а еще если камера гуляет и не жестко крепится к площадке, то поставьте сенсор на башмак камеры,
пс… жестко значит монолитно!
Да вроде не гуляет, но всё равно попробую! Спасибо!
Плоскость мотора не перпендикулярна оси вращения
Несколько раз проверял, вроде нормально. Хотя в этой конструкции сложновато всё точно выставить…
У меня вот такой и к нему квикрелизом самопальным подсоединяется подвес с камерой.
Если вам будет не сложно, выложите пожалуйста фотку вашего рига с подвесом, очень интересно посмотреть как это выглядит. Идея очень понравилась!
Уважаемые форумчане, прошу вашей помощи! Есть китайский подвес под зеркалку, noname, примерно такой:

Контроллер AlexMos 32bit. Возникла такая проблема, никак не могу настроить нормально ось питч. По этой оси возникают вибрации. Подвес сбалансирован… Что бы вибраций не было приходится сильно уменьшать пид и мощность мотора. Сейчас мощность мотора стоит 90, P-5, D-5. Но таких пидов явно не хватает для хорошей стабилизации… При повышение пидов возникают вибрации… Если положить палец на мотор питча - вибрации прекращаются. Или если например держать рамку ниже оси ролл, то вибрации тоже угасают. На ум приходит только одно - недостаточная жесткость рамы. Попробовал прицепить маленькую камеру (грамм 500-600) вместо зеркалки, с ней подвес замечательно себя ведет, сразу получилось сделать нормальные пиды и мощность увеличить без возникновения вибраций…
Действительно ли жесткости не хватает китайскому подвесу? Или может быть что-то ещё?
PS: использую два датчика, откалибровывал по 6 осям…
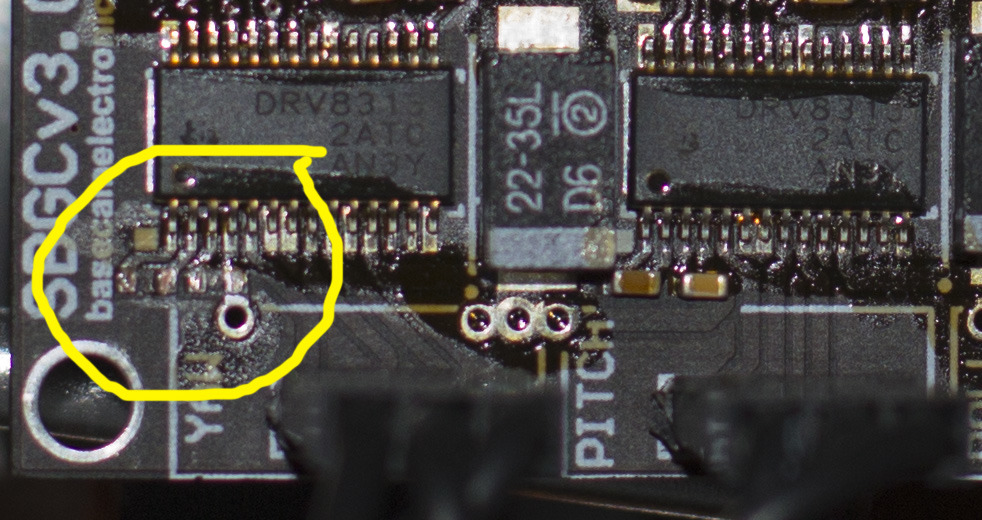
ну судя по даташиту,кондер между 1 и2 ногой 0.01мкф между 3 и 4 ногой 0.1мкф,вполне возможно что из за них не работает
Спасибо огромное! А где вы взяли этот дадашит? Никак не могу найти, дайте ссылку пожалуйста!
с ней всё нормально, это цапонлак.
Товарищи! Прошу вашей помощи! У меня не работает ось YAW. Что только не пробовал, не работает… Посмотрел внимательно на плату и у меня возникло впечатление что не хватает двух элементов как раз возле ключа оси YAW. У кого есть 32битная версия плата, посмотрите пожалуйста у себя вот это место:
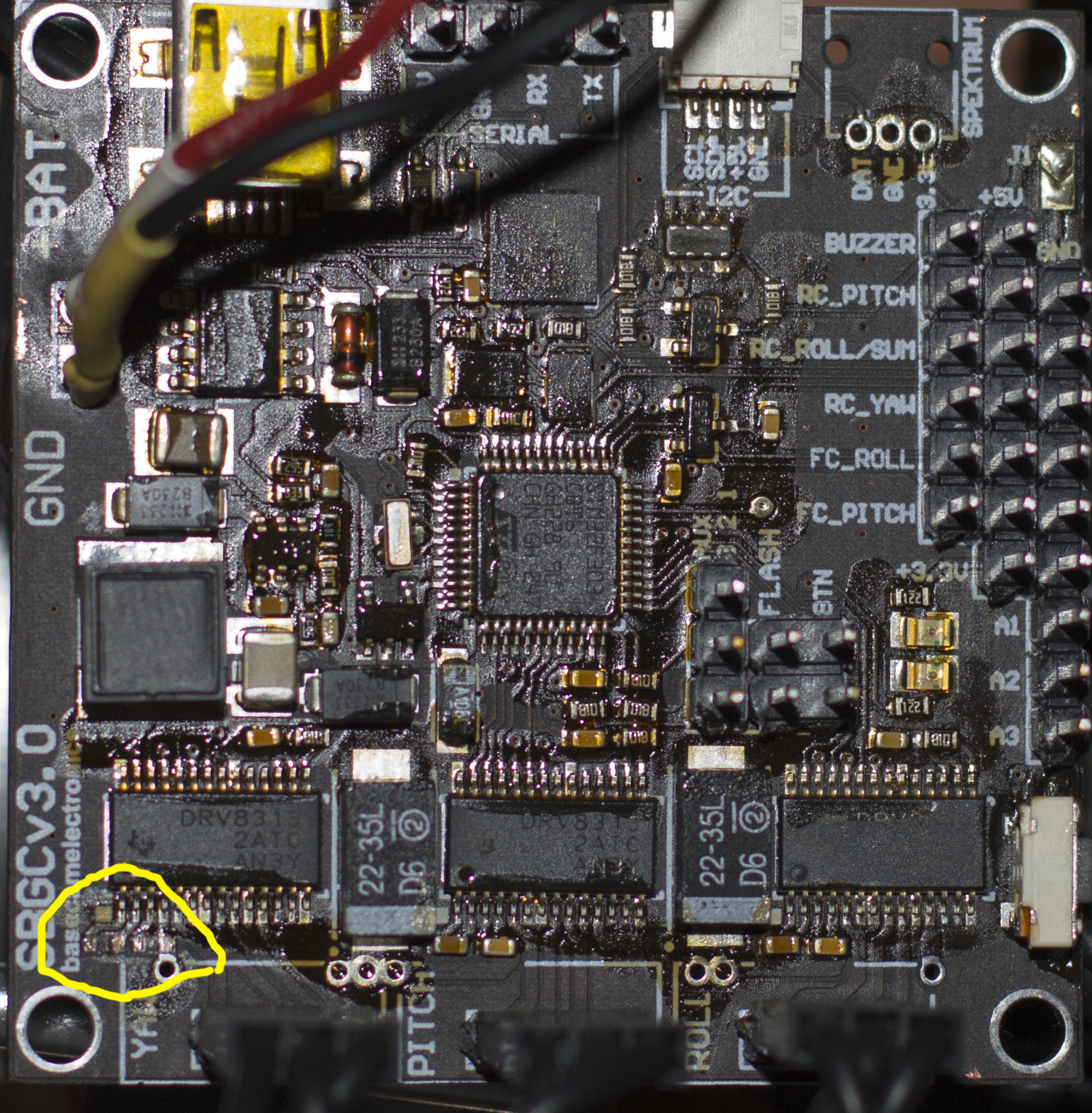
Не нашел ни одной фотографии контроллера. Но судя по этому схематичному изображению на этом месте должны быть элементы:

Кто-нибудь может подсказать что это за элементы и какого они номинала? похоже кондеры? И вообще, может ли из-за этих недостающих элементов не работать одна ось?
GPS LEA-6h, прошит последней прошивкой с QZSS и глонассом. Залит в него конфиг 3drublox.txt. 11-12 спутников ловит, HDOP 1.4 самый лучший достигался.
Подскажите, с этой прошивкой LEA-6h может пользоваться данными со спутников глонасс?
Вроде бы проскакивал где-то вопрос, но найти не могу. Кто-нибудь настраивал failsafe для APM? он требует уменьшить уровень газа ниже определенного значения. Ставлю extended limits настраиваю канал газа, в планнере он отображается верно, чуть больше 900. Пытаюсь установить это значение на фейлсейф (3 канал -125), фигня приёмник его не выставляет при выключении. Хотя если поставить значение -100, то работает. Приёмых X8R
X8R умеет выдавать заранее заданные уровни сигналов в каналах при потере связи. Можно просто задать уровень, на котором у вас RTL включается. Тогда при поторе связи приемник выдаст нужный сигнал, АПМ перейдет в режим RTL и вернётся домой…
а как их рассчитать не подскажите? у меня 4s…
Спасибо! А без правильного измерения напряжения не будет работать компенсация по напряжению, правильно?
А эти резисторы не нужно подбирать? Они всегда будут 10кОм и 2,2кОм? Интересно, почему эти резисторы сразу на заводе не припаивают?
- Заметил что очень сильно меняется качество стабилизации в зависимости от напряжения. В начале полетов более-менее нормально, но с разрядкой аккумов результат ухудшается. Видел в настройках что вроде бы есть возможность компенсации падения напряжения. Подскажите как правильно настроить эту компенсаци?
- Значение Battary Voltage у меня какое-то странное: 0,72. Не пойму почему такое странное значение…
- Толком не могу понять, зачем нужен Voltage-Sense-Modification - припаивание к контроллеру двух резисторов. Для чего это нужно?
А есть у кого скан инструкции Башера?
Не факт, встроенный ppm encoder так же мог перестать работать.
У меня обычный PWM приемник, не PPM…
а небудет одинаковых данных долгое время, каналам радиоуправления свойственен джиттер (дрожание) т.е. сигнал пусть будет 1500 он колеблется 1499-1502 все время даже если приемник завис.
логично обеспечить хорошее питание приемнику и защитить его от влаги
кроме того есть геофенс - не даст улететь полюбому
Влаги не было никакой… И с питанием вроде всё нормально. Что именно подразумевается под хорошим питанием? У меня стоит вот такой ubec TURNIGY 3A UBEC w Noise Reduction, выдает чуть больше 5V, что соответствует норме для данного приемника (4.8V-6V)
Никак не могу найти: неужели APM не имет такой функции - смотреть на сигналы по основным каналам, и если во всех каналах какое-то время сигнал не меняется запускать процедуру failsafe??? Или приемники так редко виснут, что эта функция неактуально и её не стали добавлять?
вот только что подумал а если поставить обычный фаилсейвер
“фаилсейвер” - имеется ввиду какое-то специальное устройство? или настройка в APM? Если устройство, киньте ссылку плз, а если настройка, то что именно и где нужно настроить что бы сигнал без изменений по всем каналам считался признаком для аварийной посадки?
Итак, посмотрел по логам, действительно, получается завис приемник. Вот последние секунды жизни гексы:
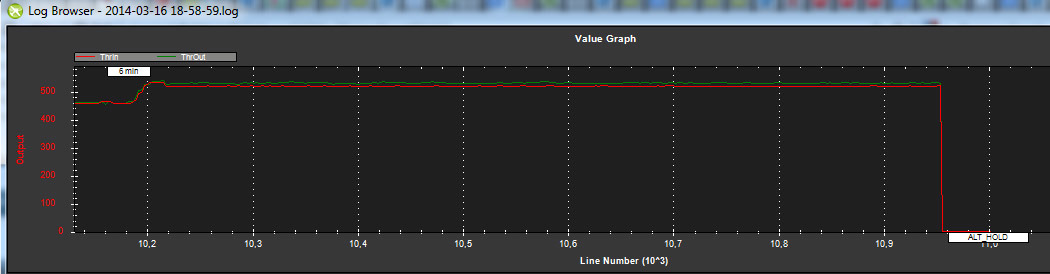
Получается с приемника в последние секунды жизни поступал ровненький сигнал газа, хотя я стик дёргал и вниз и вверх много раз… Теперь вопрос: может ли ArduCopter как-то с этим бороться? Например если со стиков несколько секунд поступает один и тот же сигнал, что б APM включал процедуру Failsafe? Или с зависанием приемника невозможно бороться?
название ?
Walkera DEVO-10 + приемник Walkera RX-1002. Пульт испытанные раньше его с вертолетом использовал и гексой им управлял. Потом гексу в реку уронил (но чисто по моей вине), приемника нового ждать не стал, поставил приемник от Турниги и успешно с ним полетал какое-то время… Тут пришел приемник валкеровский, поставил его, пошел испытывать и такое произошло…