Activity
сори за оффтоп.
мне интересен исключительно для целей изготовления плат.
Можно без электроники, право уже собирал её однажды. нужна только ходовая и моторы.
то есть точное сверление и выведение дорожек стиля v30 only.
2 Михаил Ива, а под заказ такой изготовить сможете? для меня.
Моя трассировка под PowerDIP20
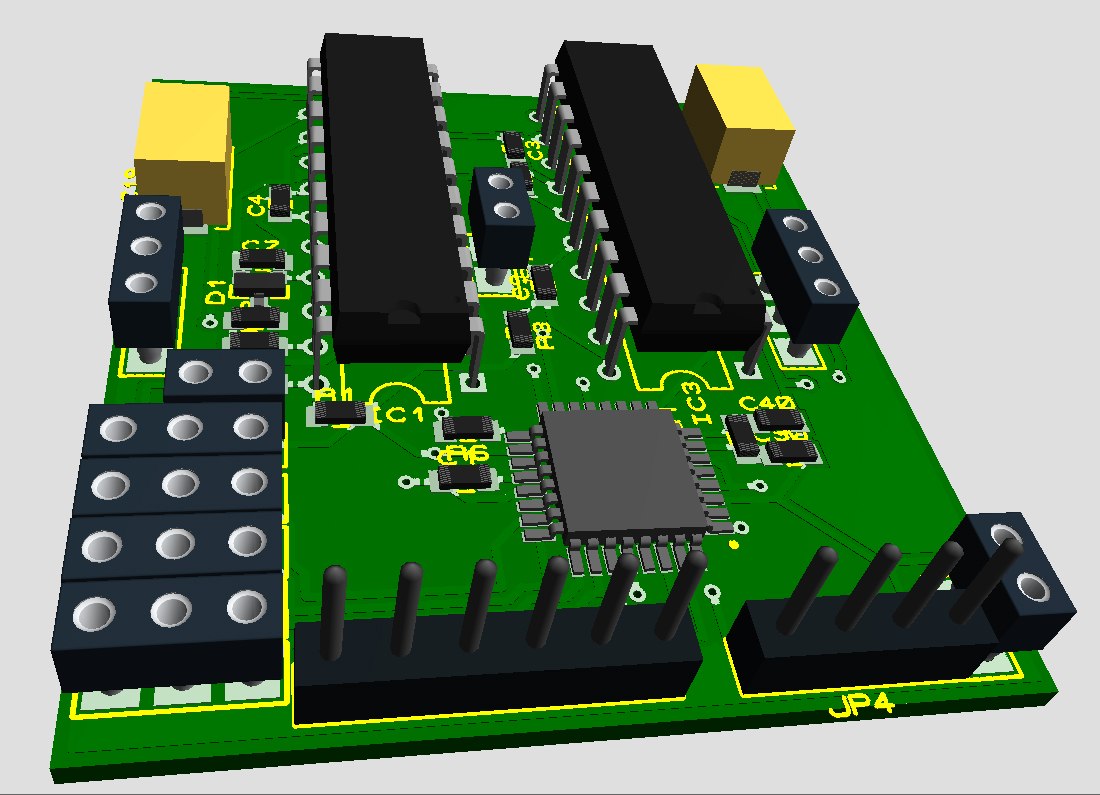
На случай, если PowerSO корпуса недоступны.
закончил с трассировкой.
Ну как же можно мотать чем больше тем лучше?
Если через чур много и тонкого, активная составляющая сопротивления возьмет свое.
Рассчитать индуктивность было бы тоже кстати, но сделать это точно очень сложно. надо измерять. а нечем.
В голову лезет только boudline под linux, но мерить компом через аудио - бред, имхо.
Дмитрий, абсолютно согласен.
Спасибо, Александр.
но какие у них характеристики? в каком виде выходной сигнал?
Касательно видео - очень впечатлило. Только подвес с таким весом можно собрать и с обычными шаговиками требуемой конструкции. Конструкция выглядит тяжелой.
2 Андрей Бресский - на счет предохранителей - это кстати. а вообще, использовал бы готовые драйвера моторов (DIP-овые), так там защита по току реализована.
2 Сергей Шоя
управлять в режиме микрошага шаговым двигателем реализовать не сложно. для этого есть множество готовых сигнальных спецконтроллеров. например этих компании: digikey и micromo. Они принимают сигнал о скорости направлении и разрешении движения и реализуют микрошаг из коробки. С ними достаточно просто работать, но, увы, приобретение подобного решения для BLDC не представляется возможным.
Ввиду этого - только ATmega + 3 плеча или 3 мотса в DIP-корпусах. реализаций есть много.
Постепенно приближаясь к запуску мотора, возник новый вопрос.
Что в качестве энкодеров?
Я вчера промониторил рынок.
Опто-энкодеры - низкая дискретность (до 256 шагов на оборот)
Магнитные - либо 2-4 битные, либо цена 50 уе за единицу энкодера. (у такого энкодера 1024 либо 2048 шагов на оборот).
С датчиками Холла - крайне низкая разрешающая способность. для микрошага не подойдут.
Резистивные - разрешение ограничено лишь разрядностью АЦП контроллера. Основной минус - не могу подобрать элемент, не испытывающий страха к вибрации, влаге, иным механическим воздействиям.
(коптерные - 30уе за единицу. )
Кто что пробовал? порекомендуйте, пожалуйста.
тестил вчера под mega328 для одного движка по упомянутому мануалу.
упустил момент отпускания одного плеча до включения второго. выпалил ключ. (замкнул через мосфеты + на землю).
Лес рубят, щепки летят. недешевые такие щепки.
У меня все равно получится )
Тестовый образец - mega328 с ардуино (тупиковая ветвь разработки, как окончательно разберусь с Atmel Studio 6, откажусь от затеи с арду), а в качестве ключей раздербанил ESC Turnigy Plush 18/20A
А как подвес себя ведет при включении перед полетом?
Горизонт берется с платки мозгов или его выставляют сами сервоприводы (настроенные на определенное значение горизонта при сборке подвеса)?
Если да, есть ли обратная связь положение оси->плата стабилизации?
// chem dalwe v les, tem tolwe partizani )
достаточно странно. интерес к теме у читателей резко пропал.
Ребята, кому-то еще удалось оживить BLDC мотор в режиме микрошага?
так тип мотора другой. Посмотрите схему. Они шаговым управляют.
Добрых 5 дней ломаю голову, как вы управляете мотором.
Сменена ли схема соединения обмоток БК или оставлена прежняя. Каким проводом и числом витков перемотали?
И, что самое главное, какой алгоритм управления используется и какова схемотехника ESC?
На сколько мне представляется возможным, для управления мотором можно использовать 3 ШИМ выхода и далее ставить уселитель на биполярных транзисторах. Либо, второй вариант - использовать Мосфеты в качестве ключей и цифровые выходы контроллера через опторазвязку?
Что вы посоветуете?
Если речь пойдет о PWM, я бы предложил использовать 16-и канальный PWM-мультиплексор с 12-и разрядной шиной от ТехасИнструментс. Есть готовая оттестированная библиотека. Могу помочь запилить 😉