Activity
Спасибо, все понятно. Теперь ждем погожих выходных для испытаний в натуре
Т.е. легче купить РЛС чем пытаться добиться того же эффекта на 2.4. А если пока не переходить на РЛС, то не возникнет проблемм с тспользованием на одном штативе патча на 5.8 под прием видео и этой антенны для управления? При том что пока не ставить целей по дальности больше 5-7 км
Вот диаграма. Вертикальная и горизонтальная практически идентичны, если верить данным сайта производителя
Да, наверное не в тот раздел написал темку. Это понятно что антенна направленная и использовать ее или с трекером или при полетах в одном направлении. Интересует два вопроса:
- На сколько дальнобойной теоретически будет связь, если на стоковой антенне мой таранис уверенно работает в пределах 1.5км. А так же каков радиус сигнала будет без направления антенны на приемник (такой эффект тоже ведь должен присутствовать)
- Планирую обзавестись наземкой, но из всего что видел на антенном трекере у людей стоит панель на 1.3 или 5.8 а аппаратура у всех поголовно на ЛРС. Тут ведь направленная антенна на 2.4 должна бы давать хорошую дальность при том что трекер четко ее направляет. Или не могут совместно качественно работать эти антенны или реально ЛРС удобнее?
Недавно рылся в шкафу и обнаружил интересную WiFi антенну D-Link ANT24-1201. Естественно она много лет назад приобреталась для иных целей, но т.к. те же 2.4Ггц, может быть ее можно еффективно использовать и в хобби?
Выглядит вот так:
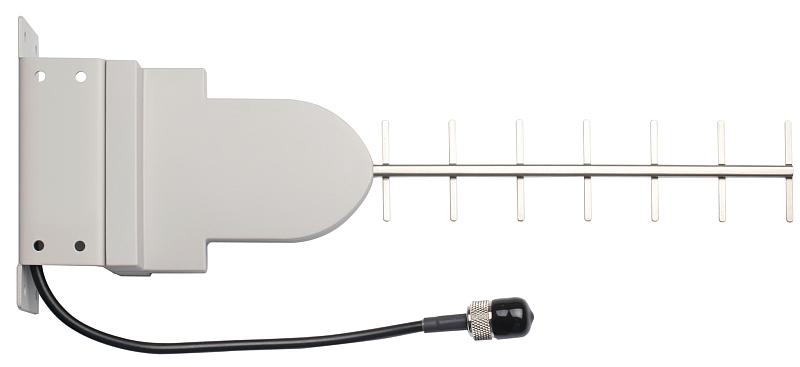
Длиной примерно 40см, весит от силы 200гр, можно хоть на пульт цеплять.
Производитель заявляет вот такие характеристики:
Диапазон частот
2,4 – 2,5 ГГц
Усиление сигнала
12 dBi
VSWR
1, 5 max
Поляризация
Линейная вертикальная
HPBW
по горизонтали 50o
по вертикали 50o
Отношение фронта к обратной стороне
15 dB
Мощность, подводимая ко входу антенны
50 Вт
Сопротивление
50 Ом
Пока погоды нет и не проверить на деле, хотелось бы потеоретизировать на тему возможных эффектов использования.
Все забываю отписаться как прошло после перестройки коптера в “как было”. Снял мотормаунты с демпферами, выкидывать пока не стал, поставил все как было, опять же проверив и перепроверив все что можно, так как разбирал аппарат полностью - ничего не изменилось, так и вращается (влево) и кружит (влево) и смещается (влево) на висении, выравнивается с трудом но посадить можно.
Вспомнил массовую панику про “плохой буржуйский ГПС” и хоть у меня всегда 12-16 спутников ловит, отключил ГПС антенну. НАЗА перешла в АТТИ и опять же ничего не изменилось, кроме того что развитие событий стало на много более стремительным, вращения и кружения ускорились, так что контролировать было невозможно и пришлось его ронять, хорошо на поле была очень высокая трава и отделался только опорной трубкой лапы.
Короче поэкспериментировал минут 10, несколько раз взлетал, садился, калибровал, ничего не меняется, аппарат ведет себя так будто это его норма.
На следующий день перекалибровал всё, всеми возможными методами. На всякий случай везде поставил все “по умолчанию”, хотя ничего никогда и не настраивал ибо и так летало хорошо. И опять же ничего не изменилось.
Теперь грешу на аппаратуру (таранис), в частности на приемник. Так как аппарат не пытается удерживать позицию, можно сделать вывод, что наза думает что ей с пульта управляют и держать кроме высоты ничего не надо. Тем более что где-то проскакивала заметка про замену приемыша и все вылечилось. Но есть большое НО - в ассистансе все в идеале. Ничего никуда не прыгает, стики стоят мертво, калибруются отлично и сразу.
Короче сломал уже себе всю голову.
И кстати тут много кто возмущался про прогрев назы и прочие небылицы, так вот у меня такового нет, ни в жару она не грелась, ни сейчас в холод, хотя калибровалась в комнатной температуре без извращений с холодильником. Включил, поморгала зеленым с красненькими, секунд через 15 нашлись все спутники, красненькие моргать перестали, проморгалась зелененькими что запомнилась точка и полетел…
Может кто рискнет махнуться назами в качестве эксперимента на один полет. Можем встретиться на выходных, да проверить что и как. В идеале если гекса и аппаратура таранис, чтоб уж наверняка ))))
Да чего смеяться? Раз не теоретик, так поделись опытом убийства коптера из-за колхоженья демпферов гашения вибрации
У меня гекса, но как видно даже из моего опыта, каждый случай уникален. Даже одна и та же неисправность на одном и том же коптере проявляется по-разному.
Да, вопрос сейчас стоит в том, переставлять ли стандартные маунты и бояться что дело было не в них с риском разбить коптер, или неизвестно каким образом выяснить в чем же проблема и оставить как есть.
Кстати определить на сколько снизились вибрации так и не удалось изза неправильно выставленной диафрагмы на фотике (((( Думал о том как полетит а не о том как снимет )))))
Самое простое, что приходит в голову - отказ одного мотора. В этом случае гексакоптер начинает крутиться. Либо по часовой, либо против, в зависимости от направления вращения плохого мотора.
Это Вы, простите, на собственном опыте выяснили? )))))
Летал дважды на 5 моторах. Оба раза изза вывалившегося из разъема регулятора, провода мотора. Первый раз все было на столько гладко что заметил неработающий мотор только во время посадки после 20 минут полетов. Во второй раз все было на много хуже, поддавался управлению плохо, посадить удалось в траву, довольно мягко, но с переворотом. Ни в первый ни во второй раз вращения не было, на висении оба раза была полная стабильность. Оба раза без повреждений. Вообще случаи были практически идентичными, но поведение коптера разным.
И этот случай на отказ мотора не похож вовсе, уж поверьте на слово
И вот опять, куча теоретиков-противников демпферов и один lukacher практик с успешным опытом. Кому верить? Что думать? Люди а есть кто реально делал демпфирование и стало гораздо хуже? Ну по типу моего случая, только точно выясненного что причиной стало демпфирование.
ООООО ДА! )))) Этот видос я тоже видел и даже повторил эксперимент заграничного товарища с мобильником для определения вибрации. И даже повторил результаты, что на виброгасящих мотормаунтах выбрацию показал больше. Но только я на этом не остановился, и попробовал сделать тоже самое не прикручивая луч в столу а держа его в руке, и во время вращения винта, особенно на больших оборотах попробовал покрутить луч вокруг своей оси. Обязательно попробуйте хоть и довольно опасное занятие. Просто чтоб понять, что коптер практически постоянно в движении, и почувствовать поведение ВМГ при преодолении гироскопического момента. Станет ясно что вибрация это не то жужжание стола, а нечто большее ))))
Раз мнения не разделились даже с моим собственным, пойду переставлять маунты обратно.
Это я знаю и все по возможности сбалансировано, потому ключевым следует считать слово “незначительные”. Или Вы хотите сказать что у вас нет вибрации вообще? Если так то интересно на чем Вы летаете и когда в ближайшее время можно это лицезреть.
Опять же обратите внимание что это далеко не первый полет данного аппарата именно с этой ВМГ, и раньше никаких сбоев небыло. Вы считаете что мотормаунты с виброразвязкой усилили имевшиеся вибрации и это привело к сбою назы?
С управлением все в порядке и во время и после полета аппаратура была проверена, т.к. сам первым дело обратил внимание на триммеры.
Про эти мотормаунты тоже читал перед покупкой, негативно настроенных теоретиков было много, из тех кто пробовал нашел коммент только одного человека и он был положительным, так что в итоге решил пробовать. Я конечно не совсем наивный, но не особо хочется верить в то что фирма, производящая коптеры и вертолеты, производит заведомо опасные элементы.
Если есть вибрации, надо балансировать, а не подкладывать подушки.
Вы немного неправильно поняли, я летаю с объективом 50мм. Для меня вибрации это чуть заниженная детализация фотоснимков. Поверьте еслиб были вибрации о которых подумали Вы, то с моим объективом, да с высоты 300м, я бы думал о чем угодно а не о детализации снимка.
Всем привет. Хочу поделиться своим полунедокрашем:
Летаю на тарот 680про в полностью стоковой комплектации, родные моторы, родные винты и т.д, NAZA M V2, все настройки тоже стоковые, ничего кроме сигнала по вольтажу в назе не трогал с постройки. Занимаюсь плановой фотосъемкой, по этому камера довольно тяжелая, полный взлетный вес моей гексы около 4.5кг. Всегда летало все отлично, немного доставали незначительные высокочастотные вибрации, которые на полете никак не отражались, но чуть мутили картинку на снимках. В борьбе за лучшее (которое враг хорошего) поменял стандартные мотормаунты на виброгасящие, тоже родные и полетел потестировать качество снимков. Летаю полностью по камере практически без визуального контакта с аппаратом, так как приходится удаляться в среднем на 600м и подниматься ровно на 300. Изза того что подвес трехосевой сразу проблемы не заметил, камера стабилизируется и все хорошо. Через пару минут полета заметил что коптер немного уводит влево, при чем, чем больше даю в разгон тем больше и резче кренится. Естественно вспомнил что крайний раз летал за 300км отсюда и вернул аппарат чтоб перекалибровать назу. После калибровки проблема не пропала, но я всетаки решил сделать несколько снимков. Улетел на стандартные 600 в плане и 300 в высоте, компенсируя самопроизвольные развороты сделал несколько снимков и пошел к дому как всегда в режиме ГПС. Так как вертикальная скорость гораздо меньше горизонтальной, то уже недалеко от меня на расстоянии метров 150 и высоте примерно 230, по камере увидел что коптер начало никисло так крутить против часовой стрелки, реакции на управление никакой, с переходом в спираль и резкой потерей высоты, на высоте пимерно 180 я перестал смотреть на монитор и увидел что коптер тупо падает кувыркаясь как стреляный воробей, так как выравнивать уже было нечего я дернул переключаитель режимов на файлсейф, после чего О ЧУДО!!! коптер выровнялся на высоте примерно 60м и как ни в чем не бывало направился ко мне. Все происходило буквально секунд 5, так что ясное дело я не обратил внимания сколько там спутников показывает осд и прочие параметры, думал только о том как бы получше запомнить место падения. Так вот я опять переключил в режим гпс и опять же с компенсацией увода влево нормально посадил коптер без повреждений.
Какие делаю выводы лично сам:
- Виноват не ГПС на который в этой теме все грешат с проклятиями на пиндосов, так как файлсейв сработал идеально.
- Аппаратура проверена и все работает идеально. Тем более что в режиме висения коптер висит отлично никуда не крутится и не отклоняется.
- Моторы регули и прочее проверены и полностью исправны.
- Батареи не просаживались так как это самое основное за чем слежу во время полетов. При такой массе коптера в зависимости от нагрузки напряжение может меняться на целый вольт, так что левый глаз всегда пристально следит за напряжением.
Возможных причин вижу полторы: - Есть вероятность что на новых мотормаунтах вибрации стали резонировать или еще какая гадость, хотя наза стоит на виброгасящей площадке. Про вличние вибрации на назу начитался строго противополжных версий, одни говорят что даже в ней самой есть демпферы поэтому ей пофиг на вибрации, другие говорят что и сами били коптеры и видели вагон битых исключительно изза сбоя назы по причине вибрации.
и второе полуподозрение - взлетаю обычно очень близко с военным стрельбищем, где не перестают стрелять последнее время круглосуточно. На их территорию естественно не лезу, ничего интересного мне они показать не смогут. Может они во мне что заподозрили и врубили некую глушилку. Но это скорее из разряда паранойи.
Со своей стороны и механику и электрику я проверил целиком и полностью, интересуют ваши версии уважаемые коллеги.
Ни я один задавал это вопрос. Но правильный ответ нашел только сам. Пропы 1355, мотормаунты на первом фото с виброразвязкой, на втором слева - с виброразвязкой, справа - сток 680про. Остальное думаю пояснять не нужно
Ну спасибо. Понеслись эксперименты с объективами )))))))
Уж не знаю что за объектив в базе идет, но поставил двух мегапиксельный от мелкой соньки, и детализация только улучшилась, правда исказилась цветопередача. Получается что матрица в 16 мегапикселей снимает через объектив в 2 мегапикселя от камеры видеонаблюдения?
Экспериментировать со спуском затвора не стал, поставил прям на камеру микросерву за 500р, места почти не занимает, ничему не мешает, на балансировку не влияет - вполне подходящий вариант. Проще, удобнее и надежнее чем ИК спуск на соньке
Прочитал последние несколько страниц темы, нашел вопрос про “Мотормаунт с виброобвязкой 16 мм”, но ответа на него так и не увидел. Дело в том что в процессе борьбы с вибрацией пришел к выводу о необходимости установки данных мотормаунтов. А так же калькулятор говорит, что моему конфигу будет лучше летать на 14-х пропах вместо 13-х.
И вот вопрос, удлинятся ли лучи рамы 680про при установке таротовских мотормаунтов с виброразвязкой (вот этих air-hobby.ru/…/1105-motormaunt-s-vibroobvyazkoy-16…) на столько чтоб установить 14-е пропы?
Про размеры действительно, SJ5000+ больше ГоПро примерно на миллиметр во все стороны в т.ч. и диаметр объектива, в подвес для ГоПро смог поставить только после часовой фрезеровки. Лично меня для фпв камера устраивает полностью, особенно порадовала работа в условиях слабого освещения, но это скорее заслуга широкоугольного объектива. Есть конечно свои косяки, например у меня не работает автозапись даже после обновления прошивки до v3.2. В связи с чем возник вопрос как сделать дистанционное управление затвором. Конечно проще и колхознее всего прицепить серву которая будет тупо нажимать кнопку, но вдруг кто-то сделал по умному. Для изменения компоновки под подвес пришлось разобрать штекер microUSB, так вот в нем кроме подпаянных на контакты 4-х проводов питания и вывода видео, есть еще 2 свободных контакта, может кто-то из них отвечает за управление затвором. Поделитесь мудростью те, кому удалось сделать управление затвором с пульта.